单频测水激光雷达
1.本发明涉及激光探测技术领域,特别涉及单频测水激光雷达。
背景技术:
2.目前,水深测量激光雷达多采用双频(1064nm和532nm)激光雷达探测水深,极少部分采用单频激光雷达探测水深。其中,双频水深测量激光雷达如申请号cn202011378792.8的一种星载激光近海岸地形探测激光雷达及探测方法专利。现有双频激光雷达发射激光抖动严重,体积大,重量重,价格昂贵,必须挂载在直升机上才能使用,需要专业人士提前规划航线,探测成本高。另外,现有双频机载激光雷达飞行高度约为500m-1000m,导致激光能量受大气衰减影响大,直接影响最大探测深度。
3.另外,申请号201710286077.3的一种测量水深的方法及激光雷达系统专利,采用的激光器没有明确说明激光波长和抖动问题,发射光学系统具体结构未清楚描述,扫描系统缺失,接收光学系统具体结构也未清楚描述,偏振分束器一定程度上可以分离水表和水底光(但同时也会大大压缩回波信号强度,直接影响水深探测深度),gm-apd灵敏度低(一般只用于水表信号探测,不适用水底信号探测)。
4.此外,申请号2015103663523的瑞利散射海洋激光雷达系统,只能用于纯水水深测量,不能用于真实环境水深测量。该专利采用的激光器抖动严重问题未描述,发射透镜组和成像大镜头结构未公布,iccd灵敏度低(只适用于很浅水深探测)。
5.针对申请号cn202011378792.8的一种星载激光近海岸地形探测激光雷达及探测方法、申请号201710286077.3的一种测量水深的方法及激光雷达系统和申请号2015103663523的瑞利散射海洋激光雷达系统发射激光抖动严重,光学系统结构(发射光学系统、扫描系统和接收光学系统)缺失,体积大,重量重的缺陷,本发明公开了单频测水激光雷达。该激光雷达发射激光抖动小、体积小、重量轻,适合在70-150m低空飞行或无人船航行,易于使用,且有效测深达30m。
技术实现要素:
6.本发明公开了单频测水激光雷达,总重低于20kg,适合快速探测水深。该单频测水激光雷达主要由激光器、分光装置、扫描系统、接收光学系统、1号apd及其后端处理电路、2号apd及其后端处理电路、pmt及其后端处理电路、射频放大电路、高速ad采样模块、存储模块、通信模块、高光谱相机、高精度pos系统、综控单元和地面站等部件组成。
7.本发明可以采用以下技术方案实现:
8.激光器。该激光器接收到外触发信号后,发射一束峰值功率200kw、脉宽2~3ns、发散角小于0.5mrad、抖动小(《900ps)的532nm激光,传输给分光装置。同时,发射工作状态信号给综控单元。其特征在于采用外触发和mopa技术,发射高重频、皮秒级抖动、发散角小于0.5mrad、532nm的准直激光,能够根据需要固定时间发射抖动小(皮秒级)的激光,解决激光器发射激光抖动严重的问题,实现水深精准探测。
9.分光装置。该分光装置接收激光器发射的激光束,分离成一小束激光和一大束激光,一小束激光传输给1号apd及其后端处理电路,一大束激光传输给扫描系统。其特征在于由平面反射镜构成。
10.扫描系统。该扫描系统接收来自分光装置的一大束激光,通过扫描反射镜将激光发射到水面。同时,发射工作状态信号给综控单元。其特征在于采用伺服电机驱动的反射式光楔实现圆周扫描,配合相应的扫描方法,如李萨如扫描、栅型扫描等实现单位面积水深的高密度探测,解决了已有水深测量激光雷达扫描出现漏点或密度低的问题。
11.接收光学系统。该接收光学系统接收来自水面(含浅水)和水底的激光回波,通过分视场镜分离水面(含浅水)和水底回波信号,水面(含浅水)回波信号进入apd及其后端处理电路通道,水底回波信号进入pmt及其后端处理电路通道。其特征在于包括物镜组、分视场镜、双通道(apd和pmt目镜组)。其特征还在于根据遥感激光雷达水深探测模型,设计双通道,结合机械结构确定主通光口径80mm、目镜组焦距为505mm、物镜组焦距为49.27和12.01(对应pmt和apd),分视场镜直径70mm、目镜组口径为64mm。物镜组采用柯克三片式物镜,焦距为505mm,第一片镜片为正焦度的zf14镜片,第二片为负焦度的f2ht镜片,第三片为正焦度的zf14镜片。分视场镜直径70mm、中心开孔直径1.5mm的分视场镜,用于分离水表激光回波信号和水底激光回波信号。目镜组口径为64mm、焦距为49.27和12.01(对应pmt和apd),采用改进凯涅尔目镜,由第一片sf66平凸镜片、第二片sf66正弯月镜片、第三片lasf14a与sf66胶合且焦度为负的双胶合镜片组成,中间的正弯月镜片用于扩充目镜最佳接收视场。
12.1号apd及其后端处理电路。该1号apd及其后端处理电路接收来自分光装置传输的很小一束激光,转化成电信号,传输给射频放大电路的1通道。同时,发射工作状态信号给综控单元。其特征在于仅能探测激光发射信号。
13.2号apd及其后端处理电路。该2号apd及其后端处理电路接收来自apd及其后端处理电路通道的水面(含浅水)信号,转化成电信号,传输给射频放大电路的2通道。同时,发射工作状态信号给综控单元。其特征在于灵敏度低仅能探测水面(含浅水)回波信号。
14.pmt及其后端处理电路。该pmt及其后端处理电路接收来自pmt及其后端处理电路通道的水底信号,转化成电信号,传输给射频放大电路的3通道。同时,发射工作状态信号给综控单元。其特征在于采用探测10-9
灵敏度的pmt探测器,最深可测约30m。
15.射频放大电路。该射频放大电路的1、2、3通道分别接收和放大来自1、2号apd及其后端处理电路和pmt及其后端处理电路传输的电信号,然后分别传输给高速ad采样模块的1、2、3通道。同时,发射工作状态信号给综控单元。其特征在于有3个通道,分别是1、2和3通道,采用射频功率放大50~850mhz的功放芯片sbb-2089,其实功率增益可达20db,可以完全满足探测器输出信号的探测。
16.高速ad采样模块。该高速ad采样模块1、2、3通道接收并采样来自射频放大电路1、2、3通道传输过来的放大电信号为高速ad采样模块1、2、3通道输出的数字信号。同时,发射工作状态信号给综控单元。其特征在于采用采样率2gsps、精度皮秒级、3通道、板载内存16g的ad采样模块,与激光器发射的激光脉宽相匹配。
17.存储模块。该存储模块接收来自高速ad采样模块1、2、3通道输出的数字信号,分别并行存储到存储器中。同时,发射工作状态信号给综控单元。其特征在于采用2t内存式存储器,速度是普通固态硬盘的7.5倍,可实现无缓存情况下高速存储海量数据,可支持连续存
储约2小时。
18.高光谱相机。该高光谱相机在接收到综控单元下发的拍照指令后,拍摄水面高光谱影像(可选)。同时,发射工作状态信号给综控单元。
19.通信模块。该通信模块接收来自地面站的控制信号,转发给综控单元,发送综控单元传输的激光器、扫描系统、1号apd及其后端处理电路、2号apd及其后端处理电路、pmt及其后端处理电路、射频放大电路、高速ad采样模块、存储模块和高精度pos系统等的工作状态信号给地面站。其特征在于包括地面站端通信模块与激光雷达端通信模块,具有全双工、采用低功耗和远距离的特点,无线传输距离最大1.5km,支持断点续传,可完全激光雷达控制。主要用于接收地面站发射的信号转发给综控单元,或者接收综控单元发射的信号转发给地面站。
20.高精度pos系统。该高精度pos系统用于获取高精度动态的gps位置数据和高精度imu姿态位置数据,传输给综控单元。同时,发射工作状态信号给综控单元。gps采用以载波相位观测为基础的实时差分gps(rtdgps)技术,实时动态测量差分定位减小定位误差,构建由基准站接收机、数据链、流动站接收机组成的rtk系统,在基准站上安置1台接收机为参考站对卫星进行连续观测,将观测数据和测站信息通过无线电传输设备实时地发送给流动站,流动站gps接收机(接收gps卫星信号)同时通过无线接收设备接收基准站传输的数据,根据相对定位的原理,实时解算出流动站的三维坐标及其精度(即基准站和流动站坐标差
△
x、
△
y、
△
h,加上基准坐标得到的每个点的wgs-84坐标,通过坐标转换参数得出流动站每个点的平面坐标x、y和海拔高h),精度达厘米级,可满足激光雷达水平定位和垂直定位需求。imu包括三个单轴的加速度计和三个单轴的陀螺仪,加速度计和陀螺仪安装在互相垂直的测量轴上,能够获取测量物体三轴姿态角(或角速率)以及加速度。
21.综控单元。该综控单元控制激光器、扫描系统、1号apd及其后端处理电路、2号apd及其后端处理电路、pmt及其后端处理电路、射频放大电路模块、高速ad采样模块、存储模块、高光谱相机和高精度pos系统等工作。同时,该综控单元获取激光器、扫描系统、1号apd及其后端处理电路、2号apd及其后端处理电路、pmt及其后端处理电路、射频放大电路模块、高速ad采样模块、存储模块和高精度pos系统等工作状态信号,通过通信模块传输给地面站,显示在屏幕上。其特征在于采用fpga实现纳秒级控制,通过通信模块与地面站全双工传输数据,保证地面站发出指令正确执行,回传激光雷达各部件工作状态给地面站,保证系统正常稳定运行。
22.地面站。该地面站通过通信模块发射指令给综控系统,控制激光雷达系统工作。同时,该地面站通过通信模块接收综控系统获取的激光器、扫描系统、1号apd及其后端处理电路、2号apd及其后端处理电路、pmt及其后端处理电路、射频放大电路模块、高速ad采样模块、存储模块、高光谱相机和高精度pos系统等工作状态信号,并在屏幕上显示。其特征在于通过通信模块与综控单元通信,发送指令/接收信号,远距离无线控制激光雷达工作。
23.挂载于平台上,单频测水激光雷达的工作过程是:
24.(1)用户在地面站启动搭载在平台(无人机/有人机/无人船)上的激光雷达,启动信号通过通信模块发送给综控单元,综控单元启动激光雷达各组成部分,同时获取启动时间数据和各部件工作状态信号,回传给地面站,存储到硬盘,显示在屏幕上。其中,综控单元下达启动指令给激光器、扫描系统、1号apd及其后端处理电路、2号apd及其后端处理电路、
pmt及其后端处理电路、射频放大电路模块、高速ad采样模块、存储模块和高精度pos系统等工作。同时,获取激光器、扫描系统、1号apd及其后端处理电路、2号apd及其后端处理电路、pmt及其后端处理电路、射频放大电路模块、高速ad采样模块、存储模块、高光谱相机和高精度pos系统的工作状态,回传给地面站,存储到硬盘,显示在屏幕上。
25.(2)综控单元读取高精度pos系统获取的位置数据、姿态数据和utc时间数据传输给高速ad采样模块(高速ad采样模块将位置数据、姿态数据、utc时间和回波信号一起存储到存储单元),获取高精度pos系统工作状态。
26.(3)激光器发射脉冲激光给分束装置。同时,发射工作状态信号给综控单元。
27.(4)分束装置接收激光器发射的激光束,分离成很小一束激光和很大一束激光,很小一束激光传输给1号apd及其后端处理电路,很大束激光传输给扫描系统。
28.(5)1号apd及其后端处理电路接收来自分光装置传输的很小一束激光,转化成电信号,传输给射频放大电路的1通道。同时,发射工作状态信号给综控单元。
29.(6)扫描系统接收来自分光装置的很大束激光,通过扫描反射镜将激光发射到水面。同时,发射工作状态信号给综控单元。
30.(7)接收光学系统接收来自水面和水底的激光回波,通过分视场镜分离水面和水底回波信号,水面回波信号进入apd及其后端处理电路通道,水底回波信号进入pmt及其后端处理电路通道,综控单元通过通信模块回传给地面站,存储到硬盘,显示在屏幕上。
31.(8)2号apd及其后端处理电路接收来自apd及其后端处理电路通道的水面(含浅水)信号,转化成电信号,传输给射频放大电路的2通道。同时,发射工作状态信号给综控单元。
32.(9)pmt及其后端处理电路接收来自pmt及其后端处理电路通道的水底信号,转化成电信号,传输给射频放大电路的2通道。同时,发射工作状态信号给综控单元。
33.(10)射频放大电路的1、2、3通道分别接收和放大来自1、2号apd及其后端处理电路和pmt及其后端处理电路传输的电信号,然后分别传输给高速ad采样模块的1、2、3通道。同时,发射工作状态信号给综控单元。
34.(11)高速ad采样模块1、2、3通道接收并采样来自射频放大电路1、2、3通道传输过来的放大电信号为高速ad采样模块1、2、3通道输出的数字信号。同时,发射工作状态信号给综控单元。
35.(12)存储模块接收来自高速ad采样模块1、2、3通道输出的数字信号,分别并行存储到存储模块。同时,发射工作状态信号给综控单元。
36.(13)高光谱相机接收到地面站通过通信模块传输到综控单元下发的拍照指令后,拍摄水面高光谱影像(可选)。同时,发射工作状态信号给综控单元。
37.(14)重复(3)~(13)的步骤,直到探测完毕目标区域所有水深回波信号。
38.(15)用户在地面站关闭激光雷达,关闭信号通过通信模块发送给综控单元,综控单元关闭激光雷达各组成部分,同时获取关闭时间数据和各部件工作状态,回传给地面站,存储到硬盘,显示在屏幕上。其中,综控单元下达关闭指令给激光器、扫描系统、1号apd及其后端处理电路、2号apd及其后端处理电路、pmt及其后端处理电路、射频放大电路模块、高速ad采样模块、存储模块和高精度pos系统等工作。同时,获取激光器、扫描系统、1号apd及其后端处理电路、2号apd及其后端处理电路、pmt及其后端处理电路、射频放大电路模块、高速
ad采样模块、存储模块、高光谱相机和高精度pos系统的工作状态。
39.(16)平台(无人机/有人机/无人船)回到地面,用户将计算机连接到激光雷达上,将ad采样获取的波形数据读取出来,用回波信号处理软件处理后输出三维点云水深数据。
40.本发明相对已有技术,主要有以下优点:
41.(1)采用外触发和mopa技术实现出光时间抖动小的激光器,实现了单频激光雷达测量水深。
42.(2)采用伺服电机驱动的反射式光楔实现圆周扫描,配合相应的扫描方法,如李萨如扫描、栅型扫描等实现单位面积水深的高密度探测,解决了已有水深测量激光雷达扫描出现漏点或密度低的问题。
43.(3)接收光学系统包括物镜组、分视场镜、双通道(apd和pmt目镜组),配合分光装置、1号apd及其后端处理电路、2号apd及其后端处理电路、pmt及其后端处理电路、3通道射频放大电路、3通道高速ad采样模块,可以实现激光发射、水面(含浅水)回波和水底回波信号的探测。
44.(4)存储模块采用内存式存储器,接收并并行存储来自高速ad采样模块1、2、3通道输出的数字信号,分别并行存储到存储器。
45.(5)高精度pos系统采用以载波相位观测为基础的实时差分gps(rtdgps)技术,实时动态测量差分定位,减小定位误差,使激光雷达水平精度达到厘米级。
附图说明
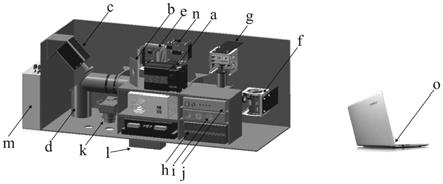
46.图1是本发明激光雷达结构
47.图中标记:a-激光器;b-分光装置;c-扫描系统;d-接收光学系统;e-1号apd及其后端处理电路;f-2号apd及其后端处理电路;g-pmt及其后端处理电路;h-射频放大电路;i-高速ad采样模块;j-存储模块;k-高光谱相机;l-通信模块;m-高精度pos系统;n-综控单元;o-地面站
48.图2是本发明接收光学系统光路
49.图中标记:p-物镜组第一片镜片;q-物镜组第二片镜片;r物镜组第三片镜片;s-分视场镜;t-apd目镜组第一片镜片;u-apd目镜组第二片镜片;v-apd目镜组第三片镜片;w-pmt目镜组第一片镜片;x-pmt目镜组第二片镜片;y-pmt目镜组第三片镜片
具体实施方案
50.为使本发明的目的、技术方案及优点更加清楚明白,以下举出优选实施例,结合附图对本发明具体实施作进一步详细说明。
51.实施例:
52.结合图1,说明无人机载单频水深测量激光雷达,主要由激光器a、分光装置b、扫描系统c、接收光学系统d、1号apd及其后端处理电路e、2号apd及其后端处理电路f、pmt及其后端处理电路g、射频放大电路h、高速ad采样模块i、存储模块j、高光谱相机k、通信模块l、高精度pos系统m、综控单元n和地面站o等部件组成。
53.结合图1说明激光器a。激光器a在接收到外触发信号的情况下,发射一束峰值功率200kw、脉宽2~3ns、发散角小于0.5mrad、抖动小(《900ps)的532nm,传输给分光装置b。同
时,发射工作状态信号给综控单元n。
54.结合图1说明分光装置b。分光装置b接收激光器a发射的激光束,分离成很小一束激光和很大一束激光,很小一束激光传输给1号apd及其后端处理电路e,很大束激光传输给扫描系统c。
55.结合图1说明扫描系统c。扫描系统c接收来自分光装置b的很大一束激光,通过扫描反射镜将激光发射到水面。同时,发射工作状态信号给综控单元n。
56.结合图1、2说明接收光学系统d。接收光学系统d接收来自水面(含浅水)和水底的激光回波,通过分视场镜s分离水面(含浅水)和水底回波信号,水面(含浅水)回波信号进入apd及其后端处理电路f通道,水底回波信号进入pmt及其后端处理电路g通道。其特征在于包括物镜组(由p、q和r组成)、分视场镜s、双通道(t、u和v组成的apd目镜组,w、x和y组成的pmt目镜组)。
57.结合图1说明1号apd及其后端处理电路e。1号apd及其后端处理电路e接收来自分光装置b传输的很小一束激光,转化成电信号,传输给射频放大电路h的1通道。同时,发射工作状态信号给综控单元n。
58.结合图1说明2号apd及其后端处理电路f。2号apd及其后端处理电路f接收来自apd及其后端处理电路通道的水面(含浅水)信号,转化成电信号,传输给射频放大电路h的2通道。同时,发射工作状态信号给综控单元n。
59.结合图1说明pmt及其后端处理电路g。pmt及其后端处理电路g接收来自pmt及其后端处理电路通道的水底信号,转化成电信号,传输给射频放大电路h的2通道。同时,发射工作状态信号给综控单元n。
60.结合图1说明射频放大电路h。射频放大电路h的1、2、3通道分别接收和放大来自1、2号apd及其后端处理电路e、f和pmt及其后端处理电路g传输的电信号,然后分别传输给高速ad采样模块i的1、2、3通道。同时,发射工作状态信号给综控单元n。
61.结合图1说明高速ad采样模块i。高速ad采样模块i的1、2、3通道接收并采样来自射频放大电路h的1、2、3通道传输的放大电信号为高速ad采样模块i的1、2、3通道输出的数字信号。同时,发射工作状态信号给综控单元n。
62.结合图1说明存储模块j。存储模块j接收来自高速ad采样模块i的1、2、3通道输出的数字信号,分别并行存储到存储模块j。同时,发射工作状态信号给综控单元n。
63.结合图1说明高光谱相机k。高光谱相机k在接收到综控单元n下发的拍照指令后,拍摄水面高光谱影像。同时,发射工作状态信号给综控单元n。
64.结合图1说明通信模块l。通信模块l接收来自地面站o的控制信号给综控单元n,发送综控单元n传输的激光器a、分光装置b、扫描系统c、接收光学系统d、1号apd及其后端处理电路e、2号apd及其后端处理电路f、pmt及其后端处理电路g、射频放大电路h、高速ad采样模块i、存储模块j、高光谱相机k、通信模块l、高精度pos系统m等的工作状态信号给地面站n。
65.结合图1说明高精度pos系统m。高精度pos系统m用于获取高精度动态的gps位置数据和高精度imu姿态位置数据,传输给综控单元n。同时,发射工作状态信号给综控单元n。
66.结合图1说明综控单元n。综控单元n控制激光器a、扫描系统c、1号apd及其后端处理电路e、2号apd及其后端处理电路f、pmt及其后端处理电路g、射频放大电路h、高速ad采样模块i、存储模块j、高光谱相机k、通信模块l、高精度pos系统m等工作。同时,该综控单元n获
取激光器a、扫描系统c、1号apd及其后端处理电路e、2号apd及其后端处理电路f、pmt及其后端处理电路g、射频放大电路h、高速ad采样模块i、存储模块j、高光谱相机k、通信模块l、高精度pos系统m等工作状态信号,通过通信模块l传输给地面站o,存储在硬盘,显示在屏幕上。
67.结合图1说明地面站o。地面站o通过通信模块l发射指令给综控单元n,控制激光雷达系统工作。同时,该地面站o通过通信模块l接收综控单元n发射的激光器a、分光装置b、扫描系统c、接收光学系统d、1号apd及其后端处理电路e、2号apd及其后端处理电路f、pmt及其后端处理电路g、射频放大电路h、高速ad采样模块i、存储模块j、高光谱相机k、通信模块l、高精度pos系统m等工作状态信号,并在屏幕上显示。
68.挂载于平台上,无人机载单频水深测量激光雷达的工作过程是:
69.(1)用户在地面站o启动搭载在平台(无人机/有人机/无人船)上的激光雷达,启动信号通过通信模块l发送启动信号给综控单元n,综控单元n启动激光雷达各组成部分,同时获取启动时间数据和各部件工作状态,回传给地面站o,存储到硬盘,显示在屏幕上。其中,综控单元n下达启动指令给激光器a、扫描系统c、1号apd及其后端处理电路e、2号apd及其后端处理电路f、pmt及其后端处理电路g、射频放大电路h、高速ad采样模块i、存储模块j、高光谱相机k、通信模块l、高精度pos系统m等工作。同时,获取激光器a、分光装置b、扫描系统c、接收光学系统d、1号apd及其后端处理电路e、2号apd及其后端处理电路f、pmt及其后端处理电路g、射频放大电路h、高速ad采样模块i、存储模块j、高光谱相机k、通信模块l、高精度pos系统m的工作状态,回传给地面站,存储到硬盘,显示在屏幕上。
70.(2)综控单元n读取高精度pos系统m获取的位置数据、姿态数据和utc时间数据传输给高速ad采样模块i(高速ad采样模块将位置数据、姿态数据、utc时间和回波信号一起存储到存储单元),获取高精度pos系统m工作状态。
71.(3)激光器a发射脉冲激光给分束装置b。同时,发射工作状态信号给综控单元n。
72.(4)分束装置b接收激光器a发射的激光束,分离成很小一束激光和很大一束激光,很小一束激光传输给1号apd及其后端处理电路e,很大束激光传输给扫描系统c。
73.(5)1号apd及其后端处理电路e接收来自分光装置b传输的很小一束激光,转化成电信号,传输给射频放大电路h的1通道。同时,发射工作状态信号给综控单元n。
74.(6)扫描系统c接收来自分光装置b的很大束激光,通过扫描反射镜将激光发射到水面。同时,发射工作状态信号给综控单元n。
75.(7)接收光学系统d接收来自水面(含浅水)和水底的激光回波,通过分视场镜d分离水面(含浅水)和水底回波信号,水面(含浅水)回波信号进入apd及其后端处理电路通道,水底回波信号进入pmt及其后端处理电路通道。
76.(8)2号apd及其后端处理电路f接收来自apd及其后端处理电路通道的水面(含浅水)信号,转化成电信号,传输给射频放大电路h的2通道。同时,发射工作状态信号给综控单元n。
77.(9)pmt及其后端处理电路g接收来自pmt及其后端处理电路通道的水底信号,转化成电信号,传输给射频放大电路h的3通道。同时,发射工作状态信号给综控单元n。
78.(10)射频放大电路h的1、2、3通道分别接收和放大来自1、2号apd及其后端处理电路e、f和pmt及其后端处理电路g传输的电信号,然后分别传输给高速ad采样模块i的1、2、3
通道。同时,发射工作状态信号给综控单元n。
79.(11)高速ad采样模块i的1、2、3通道接收并采样来自射频放大电路h的1、2、3通道传输过来的放大电信号为高速ad采样模块i的1、2、3通道输出的数字信号。同时,发射工作状态信号给综控单元n。
80.(12)存储模块j接收来自高速ad采样模块i的1、2、3通道输出的数字信号,分别并行存储到存储模块j。同时,发射工作状态信号给综控单元n。
81.(13)高光谱相机k接收到地面站通过通信模块l传输到综控单元n下发的拍照指令后,拍摄水面高光谱影像(可选项)。同时,发射工作状态信号给综控单元n。
82.(14)重复(3)~(13)的步骤,直到探测完毕目标区域所有水深。
83.(15)用户在地面站o关闭激光雷达,关闭信号通过通信模块l发送给综控单元n,综控单元n关闭激光雷达各组成部分,同时获取关闭时间数据和各部件工作状态,回传给地面站o,存储到硬盘,显示在屏幕上。其中,综控单元n下达关闭指令给激光器a、扫描系统c、1号apd及其后端处理电路e、2号apd及其后端处理电路f、pmt及其后端处理电路g、射频放大电路h、高速ad采样模块i、存储模块j、高光谱相机k、通信模块l、高精度pos系统m等工作。同时,获取激光器a、分光装置b、扫描系统c、接收光学系统d、1号apd及其后端处理电路e、2号apd及其后端处理电路f、pmt及其后端处理电路g、射频放大电路h、高速ad采样模块i、存储模块j、高光谱相机k、通信模块l、高精度pos系统m的工作状态,回传给地面站,存储到硬盘,显示在屏幕上。
84.(16)平台(无人机/有人机/无人船)回到地面,用户将计算机连接到激光雷达上,将ad采样获取的波形数据读取出来,用回波信号处理软件处理后输出三维点云水深数据。
85.以上实施方式仅用于说明本发明,而并非对本发明的限制,有关技术领域的普通技术人员,在不脱离本发明的精神和范围的情况下,还可以做出各种变化和变形。因此,所有等同的技术方案也属于本发明的范畴,本发明的专利保护范围应由权利要求限定。
86.本发明未详尽描述的技术内容均为公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1