一种着陆灯可靠性检测评估方法与流程
1.本发明涉及航空技术领域,具体涉及一种着陆灯可靠性检测评估方法。
背景技术:
2.飞机着陆灯的设计目标是为飞机夜航着陆提供照明,具体讲就是从高度100ft 开始提供照明直至飞机触地、滑行的全阶段。飞机着陆灯最终能否达到此目标除了取决于灯具的数量、安装位置外,更取决于正确的安装角度。在设计着陆灯时,首先根据飞机的气动布局以及着陆灯光源性能初步选择着陆灯的数量以及安装位置,然后根据飞机的理论着陆俯仰角度计算出着陆灯的安装角度,最后通过软件仿真得到着陆阶段的照射效果(“光照区域范围”和“光照亮度”,这也是后续评判着陆灯设计是否合格的主要考察指标)。当此结果与设计目标值不符时须返回初始设计,从修正安装角度、更换灯具、增减数量等几个方面不断循环迭代设计,以达到最优的照射效果。
3.基于sae标准,对飞机上的各型号灯具进行安装和调试,但在后续的长期飞行中,如果能一直保持灯具的最佳工作状态,使其一直满足sae标准,需要进行一个持续的采样监测工作,及时发现并检修不符合sae标准或故障的灯具,确保飞行安全。
4.由于着陆灯的照明时长较长,即使是在白天飞行时,也是常亮的状态,避免鸟类撞击飞机,为了实时了解着陆灯的工作状况和光照性能,需要完整的着陆灯检测系统,确保飞机的正常行驶和降落。
技术实现要素:
5.本发明目的在于提供一种着陆灯可靠性检测评估方法,能够实时的进行着陆灯的故障预测,通过温度跳跃值预测着陆灯损坏的程度,确定后期维修更换的时间。
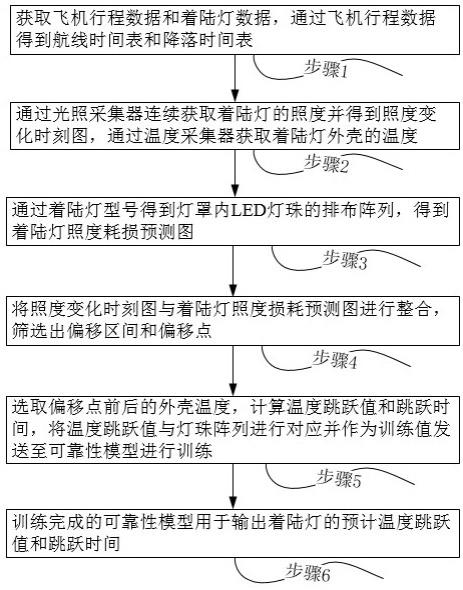
6.为实现上述目的,本发明所采用的技术方案是:一种着陆灯可靠性检测评估方法,包括以下步骤:步骤1:获取飞机行程数据和着陆灯数据,通过飞机行程数据得到航线时间表和降落时间表;步骤2:通过光照采集器连续获取着陆灯的照度并得到照度变化时刻图,通过温度采集器获取着陆灯外壳的温度;步骤3:通过着陆灯型号得到灯罩内led灯珠的排布阵列,得到着陆灯照度耗损预测图;步骤4:将照度变化时刻图与着陆灯照度损耗预测图进行整合,筛选出偏移区间和偏移点;步骤5:选取偏移点前后的外壳温度,计算温度跳跃值和跳跃时间,将温度跳跃值与灯珠阵列进行对应并作为训练值发送至可靠性模型进行训练;步骤6:训练完成的可靠性模型用于输出着陆灯的预计温度跳跃值和跳跃时间。
7.优选的,所述步骤1中,通过航线时间表和降落时间表确定着陆灯常亮的时间段。
8.优选的,所述步骤2中,光照采集器捕捉不同方位的照度计求平均值得到照度变化时刻图,其中,照度计数量x为式中,n为相邻的着陆灯数量,照度计对称设置在着陆灯的外壳边界。
9.优选的,所述步骤3中,灯珠的排布阵列包括led灯珠全部串联、led灯珠全部并联和led灯珠混合串并联。
10.优选的,所述步骤4中,当时间小于所述偏移点对应时刻时,照度损耗预测线与照度变化时刻线重合。
11.优选的,当时间大于所述偏移点对应时刻时,照度损耗预测线与照度变化时刻线分离。
12.优选的,当时间大于所述偏移点对应时刻时,照度损耗预测线高于照度变化时刻线时,温度跳跃值为负数,当照度损耗预测线低于照度变化时刻线时,温度跳跃值为正数。
13.优选的,所述可靠性模型内设定有去噪阈值,当温度跳跃值小于去噪阈值时,统计该温度跳跃值持续的跳跃时间进行训练,当温度跳跃值大于去噪阈值时,直接截取去噪阈值对应的跳跃时间进行训练。
14.综上所述,本发明的有益效果为:1、能够匹配具体的飞机航线、飞行时间确定着陆灯常亮的时刻,进而获取大量训练数据;2、通过寻找温度跳跃值,预测着陆灯故障的时间,便于后期维修和更换。
附图说明
15.图1为本发明的一种着陆灯可靠性检测评估方法的示意图。
具体实施方式
16.下面结合本发明的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
17.实施例1:一种着陆灯可靠性检测评估方法,如图1所示,包括以下步骤:步骤1:获取飞机行程数据和着陆灯数据,通过飞机行程数据得到航线时间表和降落时间表;步骤2:通过光照采集器连续获取着陆灯的照度并得到照度变化时刻图,通过温度采集器获取着陆灯外壳的温度;步骤3:通过着陆灯型号得到灯罩内led灯珠的排布阵列,得到着陆灯照度耗损预测图;步骤4:将照度变化时刻图与着陆灯照度损耗预测图进行整合,筛选出偏移区间和偏移点;
步骤5:选取偏移点前后的外壳温度,计算温度跳跃值和跳跃时间,将温度跳跃值与灯珠阵列进行对应并作为训练值发送至可靠性模型进行训练;步骤6:训练完成的可靠性模型用于输出着陆灯的预计温度跳跃值和跳跃时间。
18.值得注意的是,所述步骤1中,通过航线时间表和降落时间表确定着陆灯常亮的时间段。
19.值得注意的是,所述步骤2中,光照采集器捕捉不同方位的照度计求平均值得到照度变化时刻图,其中,照度计数量x为式中,n为相邻的着陆灯数量,照度计对称设置在着陆灯的外壳边界。
20.值得注意的是,上述照度计的安装方式是仅仅适用于飞机上的远光照明设备,灯具角度小,但光强大,因此对于灯具中灯珠的组合要求更高,通过上述的模型训练,得到最佳的led灯珠的排布阵列,具体着陆灯的发光角度为,水平角度为12
°±6°
,垂直角度12
°±6°
,得到最佳中心亮度的是765000cd
±
200000cd,12
‑
24个灯珠排布,灯珠嵌在固定板上的反光杯中,反光杯边缘设置有加强筋,增加固定板的稳定性和强度,反光杯边缘连接有一体式透镜,将光反射在55
°
和60
°
之间,通过设置反光杯和透镜,重量轻,安装方便,一致性好,在求取照度平均值的情况下,能够更精确得出灯具中光照不足的灯珠位置,通过大量采集灯具的工作时间、灯珠的组合方式得出灯具(着陆灯)照度降低(跳跃式降低)的逻辑关系,除此之外,还包括灯具的温度、大小、结构都能作为可靠性模型的深度学习的训练值,进而得到飞机上灯具的故障预测。
21.值得说明的是,以着陆灯为技术启示,本技术还能应用在转弯灯、滑行灯上,但转弯灯和滑行的聚光角度略差异于着陆灯,因此需要适配调整照度计的位置,得到具体的数据如下,滑行灯设置6
‑
18个,水平角度:50
°±
25
°
(
‑
10%光强),垂直角度 16
°±8°
(
‑
10%光强),中心亮度:90000cd
±
20000cd,转弯灯设置3
‑
12 个,水平角度: 40
°±
20
°
(
‑
10%光强),垂直角度 10
°±5°
(
‑
10%光强),中心亮度 25000cd
±
12000cd。
22.值得注意的是,所述步骤3中,灯珠的排布阵列包括led灯珠全部串联、led灯珠全部并联和led灯珠混合串并联,所述步骤4中,当时间小于所述偏移点对应时刻时,照度损耗预测线与照度变化时刻线重合。
23.值得注意的是,当时间大于所述偏移点对应时刻时,照度损耗预测线与照度变化时刻线分离,当时间大于所述偏移点对应时刻时,照度损耗预测线高于照度变化时刻线时,温度跳跃值为负数,当照度损耗预测线低于照度变化时刻线时,温度跳跃值为正数。
24.值得注意的是,所述可靠性模型内设定有去噪阈值,当温度跳跃值小于去噪阈值时,统计该温度跳跃值持续的跳跃时间进行训练,当温度跳跃值大于去噪阈值时,直接截取去噪阈值对应的跳跃时间进行训练。
25.值得注意的是,考虑在飞机在运行时,产生的振动影响着陆灯与光照计之间的位置,避免高空低温影响光照计的灵敏度,通过将光照计的探针伸入至着陆灯内部,由于着陆灯的体积较大,采用多个光照计同时采集并求取平均值,来确定实时的着陆灯光照度。
26.值得说明的是,着陆灯灯珠包含有多种串并联组合方式,进而得到不同的光照度,因此,着陆灯照度损耗预测图也会因为串并联组合的方式呈现为不同的曲线,通过大数据
智能算法,将大量的实时光照度数据与预测曲线进行比对,在机器学习下,预测温度跳跃值出现的下一时刻,帮助机场维修人员及时更换或维修着陆灯。
27.在本发明的描述中,需要理解的是,术语“逆时针”、“顺时针”“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1