一种基于水平重力势-位置转化的海洋垂线偏差测量方法与流程
1.本发明航洋重力场测量技术领域,尤其是一种基于水平重力势-位置转化的海洋垂线偏差测量方法。
背景技术:
2.地球重力场是反映地球物质分布特征的物理场,是地球引力场和惯性离心力场的合成场,分布于地球表面及其临近空间。重力场作为天然的物理资源,早已广泛用于各类系统中,其中比较典型的应用是惯性导航系统,但对于惯导而言,重力场这个物理场“并不完美”。“完美”的重力场,也即正常重力场模型将地球视为旋转椭球体,重力矢量指向椭球体法向。指向参考椭球法向的重力矢量在惯性导航系统中被用作与地球相关的位置参考基准。由于地球形状的不规则和内部质量分布的不均匀性,实际重力场变化非常复杂,实际观测重力场与理论上正常重力场存在着偏差,称为扰动重力场,其中二者的标量差称为重力异常,方向差称为垂线偏差。垂线偏差的存在,实际重力矢量偏离了参考椭球体法向,作为位置参考基准精度下降,必须依赖精确的重力信息予以补偿。
3.重力信息包含重力异常和垂线偏差信息,重力信息测量一般使用力传感器,由于力传感器难以区分运动加速度和重力加速度,必须考虑载体运动干扰的补偿。目前趋于成熟的海洋重力测量技术是指垂向重力异常的测量,其利用卫导信息对载体垂向加速度进行补偿;相比于重力异常测量,海洋运动平台水平加速度的补偿更为困难,尚未有有效的海洋垂线偏差船载测量方法。海洋垂线偏差信息主要依据卫星测高数据解算获取,空间分辨率不足且精度有限。
4.垂线偏差在全海域普遍存在,大部分表现为3-5角秒幅值的缓慢变化,基于卫星测高数据的垂线偏差图可以较为精确的建模这些缓慢变化区域的垂线偏差;但受限于空间分辨率,对于大洋中也较为广泛存在的小空间尺度上剧烈的垂线偏差变化,基于卫星测高数据的垂线偏差图建模能力明显下降,不能满足应用需求,如何有效提高船载高精度海洋垂线偏差测量精度是目前迫切需要解决的问题。
技术实现要素:
5.本发明的目的在于克服现有技术的不足,提供一种基于水平重力势-位置转化的海洋垂线偏差测量方法,提高了船载海洋垂线偏差测量的精度。
6.本发明解决现有的技术问题是采取以下技术方案实现的:
7.一种基于水平重力势-位置转化的海洋垂线偏差测量方法,包括以下步骤:
8.步骤1、标定不同周期变化的东西/南北方向垂线偏差与其引起的经度/纬度输出量值的转换系数函数;
9.步骤2、启动惯导,将东向/北向加速度计原始输出分别减去载体所在位置东西/南北方向垂线偏差图值后作为东向/北向加速度计的输出数据,惯导完成对准后转入惯/卫组合导航解算程序m1,用于消除惯性自主导航中的经度/纬度振荡发散误差;
10.步骤3、载体航行进入预设的垂线偏差测量测线,通过设定航速将测线实际垂线偏差与垂线偏差图值的差值所包含波长信息变换为2倍舒勒振荡周期,将λ海里波长的垂线偏差信息变换为周期tm的时间信号所需的载体速度v
λ
=λ/tm;
11.步骤4、在测线l航行时间段t
l
同步记录惯性自主导航经度lon(t
l
)和纬度lat(t
l
)、卫导经度bdlon(t
l
)和纬度bdlat(t
l
),求取两者经度差值lonc(t
l
)=lon(t
l
)-bdlon(t
l
)和纬度latc(t
l
)=lat(t
l
)-bdlat(t
l
),利用bdlon(t
l
)、bdlat(t
l
)将时间序列lonc(t
l
)和latc(t
l
)转换为空间序列lonc(l)和latc(l),设测线l上东西/南北方向垂线偏差图值分别为get(l)和gnt(l),根据步骤1得到的转换系数函数函数fe、fn获取2t周期附近的平均转换系数f
e1
、f
n1
,则测线l上东西/南北方向垂线偏差测量值分别为ge(l)=f
e1
*lonc(l)+get(l),gn(l)=f
n1
*latc(l)+gnt(l)。
12.而且,所述步骤2去除惯性自主导航中的经度/纬度振荡发散误差方法包括以下步骤:
13.⑴
设td为半个地球周期,t0+ntd时刻以惯/卫组合导航解算程序m1获得的载体位置和姿态信息作为初始值启动惯性自主导航解算程序jn,jn输出经度为lon
t0+ntd
(t)、纬度为lat
t0+ntd
(t),;
14.⑵
按下式计算用于垂线偏差测量解算的惯导经度/纬度:(t0+ntd,t0+(n+1)td)时间区间内t时刻惯性自主导航经度输出lon(t)=0.5(lon
t0+(n-2)td
(t)+lon
t0+(n-1)td
(t)),惯性自主导航纬度输出lat(t)=0.5(lat
t0+(n-2)td
(t)+lat
t0+(n-1)td
(t))
15.上式中,n=0,1,2,3,...。
16.本发明的优点和积极效果是:
17.本发明设计合理,其利用加速度传感器无差别感知运动加速度和重力加速度的特性,把水平方向的重力势转化为惯导自主导航位置输出中的信息;采取措施有效抑制了干扰垂线偏差测量的惯导位置输出中的地球周期振荡部分;通过补偿垂线偏差图信息将待测垂线偏差变换为窄带信号,并利用惯导频响特性放大了这一窄带垂线偏差信号,从而实现了垂线偏差的精确测量,可用于支撑海洋重力场信息建设与应用。
附图说明
18.图1为本实施例给出的不同变化周期的东西方向垂线偏差—经度输出的转换关系图;
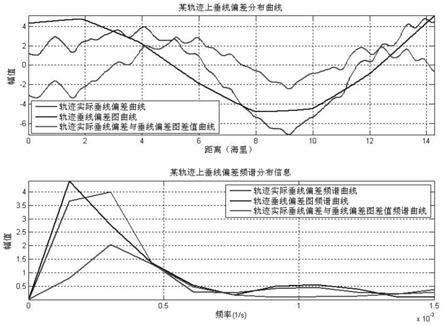
19.图2为本实施例给出的某轨迹上实际垂线偏差与垂涎偏差图信息比对图。
具体实施方式
20.以下结合附图对本发明实施例做进一步详述。
21.本发明是在高精度惯导、精密差分卫导和基于卫星测高数据解算的垂线偏差图构成海洋垂线偏差测量系统上实现的。其利用加速度计物理传感和惯导解算原理,将东西方向垂线偏差势能转化为惯导经度输出中对应信息,将南北方向垂线偏差势能转化为惯导纬度输出中对应信息,通过错时启动的惯导自主解算组合有效抑制惯导输出中地球振荡周期变化的干扰信息,通过比对惯导与卫导经纬度信息分离出惯导经纬度输出中由垂线偏差引起的部分,并按照事先标定的东西方向垂线偏差到经度输出、南北方向垂线偏差到纬度输
出的映射关系,解算获取东西方向和南北方向的垂线偏差信息。
22.基于上述说明,本发明提出一种基于水平重力势-位置转化的海洋垂线偏差测量方法,包括以下步骤:
23.步骤1、标定不同周期变化的东西/南北方向垂线偏差与其引起的经度/纬度输出量值的转换系数函数。
24.高精度惯导工作于阻尼状态,以数据注入的方式在惯导东向/北向加速度计输出数据上叠加代表东西/南北方向垂线偏差的模拟激励数据,标定不同周期变化的东西/南北方向垂线偏差与其引起的经度/纬度输出量值的转换系数函数fe、fn,单位为米/角秒。不同变化周期的东西方向垂线偏差到经度输出的转换系数标定结果示例如图1所示,该图中t为舒勒周期,约等于84.4分钟。
25.步骤2、启动惯导,将东向/北向加速度计原始输出分别减去载体所在位置东西/南北方向垂线偏差图值后作为东向/北向加速度计的输出数据,惯导完成对准后转入惯/卫组合导航解算程序m1。进行垂线偏差测量时惯性自主导航由于其传感器漂移等误差源而产生的经度/纬度地球振荡发散误差将对垂线偏差测量解算造成干扰,采取下述操作去除惯性自主导航中的经度/纬度振荡发散误差:
26.①
令td为半个地球周期,t0+ntd(n=0,1,2,3,...)时刻以惯/卫组合导航解算程序m1获得的载体位置和姿态信息作为初始值启动惯性自主导航解算程序jn,jn输出经度为lon
t0+ntd
(t)、纬度为lat
t0+ntd
(t);
27.②
用于垂线偏差测量解算的惯导经度/纬度输出如下:(t0+ntd,t0+(n+1)td)(n=2,3,...)时间区间内t时刻惯性自主导航经度输出lon(t)=0.5(lon
t0+(n-2)td
(t)+lon
t0+(n-1)td
(t)),惯性自主导航纬度输出lat(t)=0.5(lat
t0+(n-2)td
(t)+lat
t0+(n-1)td
(t))。
28.步骤3、载体航行进入预设的垂线偏差测量测线,保持匀速直航状态。由于步骤2中利用垂线偏差图信息对惯导加速度计输出进行了补偿,测量的对象为测线实际垂线偏差与测线垂线偏差图值的差值,实际垂线偏差与垂线偏差图值比对示例如图2所示。测线实际垂线偏差可能包含多种波长信息,但其与垂线偏差图值差值则主要表现有限波长区间信息,一般波长范围在8-12海里区间。综合考虑惯性导航系统频响特性和测量效率,通过合理设计航速将测线实际垂线偏差与垂线偏差图值的差值包含波长信息变换为2倍舒勒振荡周期即2t附近的时间信号。λ海里波长的垂线偏差信息变换为周期tm的时间信号所需的载体速度v
λ
按下式计算,v
λ
=λ/tm。如采用3.5kn速度时,可将8-12海里区间波长的垂线偏差信息变换为1.6t-2.4t周期区间时间信号。
29.步骤4、在测线l航行时间段t
l
同步记录惯性自主导航经度lon(t
l
),纬度lat(t
l
),卫导经度bdlon(t
l
),纬度bdlat(t
l
),求取差值lonc(t
l
)=lon(t
l
)-bdlon(t
l
)、纬度latc(t
l
)=lat(t
l
)-bdlat(t
l
)。利用bdlon(t
l
)、bdlat(t
l
)将时间序列lonc(t
l
)和latc(t
l
)转换为空间序列lonc(l)和latc(l),测线l上东西/南北方向垂线偏差图值分别为get(l),gnt(l)。利用步骤1中的函数fe、fn获取2t周期附近的平均转换系数f
e1
、f
n1
,则测线l上东西/南北方向垂线偏差测量值分别为ge(l)=f
e1
*lonc(l)+get(l),gn(l)=f
n1
*latc(l)+gnt(l)。
30.需要强调的是,本发明所述的实施例是说明性的,而不是限定性的,因此本发明包括并不限于具体实施方式中所述的实施例,凡是由本领域技术人员根据本发明的技术方案得出的其他实施方式,同样属于本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1