一种卫星导航反欺骗方法和装置与流程
1.本发明涉及欺骗信号检测领域,尤其是一种卫星导航反欺骗方法和装置。
背景技术:
2.全球导航卫星系统是国际长期关注的一个高新技术领域,其工作具有不受时间、天气、气候限制的优良特点,并且可以实时、连续的向用户提供导航信息,所提供的导航信息定位精度高,同时为用户提供测速和授时等附加功能。全球导航卫星系统在人们的生产生活中应用的越来越广泛,军事领域对全球导航卫星系统也是愈发的依赖。
3.千寻位置服务属于网络rtk差分数据服务,亦是北斗地基增强系统。千寻位置以北斗卫星系统(兼容gps、glonass、galileo)定位数据为基础,利用遍及全国的数千个地基增强站和自主研发的定位算法,再通过互联网大数据运算,对定位误差进行修正,实现高精度定位服务,用户可根据需要获取实时亚米级、厘米级、后处理毫米级精度的位置服务。
4.但卫星信号具有信号功率低的特点,它的功率仅是我们生活中收听的广播信号的功率的十分之一左右,如此低的信号功率造成了卫星信号时常遭受到各种各样的电磁干扰。而人为恶意干扰主要分为两种:压制式干扰和欺骗式干扰,其中欺骗式干扰是通过故意制造虚假或伪装真实的卫星信号,从而诱使对方错误的理解和使用获得的导航信息进行定位已达到欺骗的目的。
5.卫星导航系统的民用信号结构是公开的,从而使其非常容易受到相应的欺骗干扰。同时随着我国北斗导航系统的应用范围越来越广,使得诸如船舶、飞机、以及依赖于北斗卫星导航系统的交通运输工具和智能设备都有可能受到欺骗干扰的威胁。因此恶意的欺骗干扰将对我国的国防建设和经济发展造成严重的危害。
技术实现要素:
6.为了克服现有技术的不足,本发明提供一种卫星导航反欺骗方法和装置。本发明的方法和装置所用接收机是基于北斗地基增强系统实现定位的。
7.本发明解决其技术问题所采用的技术方案包括如下步骤:
8.步骤1:设置接收机1和接收机2间隔一固定间距,利用差波束天线分别接收卫星导航信号至接收机1和接收机2,卫星导航接收机捕获卫星导航信号后,经过跟踪、位同步和帧同步、星历解析实现定位解算,获得定位信息,将该定位信息分别送至存储部分进行存储,转到步骤2;
9.步骤2:分别控制接收机1和接收机2的模数转换部分停止工作,使卫星导航接收机失锁,控制差波束天线转动一定角度,控制接收机的模数转换部分开始工作,重新进行捕获跟踪和解算,并将解算出的定位信息送至存储部分进行存储,当差波束天线转动了一周后,转到步骤3;
10.步骤3:接收机1和接收机2的判断部分分别从存储部分读取定位信息,并将定位信息进行对比,由于接收机是基于北斗地基增强系统实现定位的,精度可达亚米级、厘米级、
后处理毫米级精度,当发现某一角度(差波束天线零点波束指向)的定位信息不同于其它角度的定位信息时,则说明有卫星导航欺骗信号,此时的定位数据不可信。
11.进一步的,若是空间存在欺骗干扰信号,进行抑制的步骤为:接收机1和接收机2的控制部分分别控制旋转机构旋转差波束天线,使差波束天线的零点波束指向定位信息异常于其它角度的方向,待定位后,利用定位数据计算接收机1和接收机2之间的间隔距离,若计算所得间隔距离与实际间隔间距的差值小于设定阈值,则说明此时差波束天线零点波束指向的是欺骗干扰来向,利用差波束天线的方向性将欺骗信号抑制,达到反欺骗正常定位的目的。
12.若是空间存在欺骗干扰信号,欺骗干扰信号会从某一角度到达卫星导航接收机的天线部分,利用差波束天线进行旋转接收,当波束天线零点波束指向欺骗干扰来向时,卫星导航接收机将接收不到欺骗信号,从而获得正常的定位信息;若波束天线零点波束指向不是欺骗干扰来向时,卫星导航接收机将接收欺骗信号,从而获得错误的定位信息。
13.所述步骤1定位信息分别送至存储部分进行存储的具体步骤为:
14.步骤1.1:分别对两个差波束天线进行标定,标定其零点波束相对于天线结构的指向;
15.步骤1.2:在两个天线旋转机构的外壳上分别制作圆周角度标示;
16.步骤1.3:设置两个接收机间隔一固定间距,固定间距大于1米;
17.步骤1.4:卫星导航接收机分别开机后,控制部分分别控制天线旋转机构旋转,使差波束天线的零点波束分别指向标识和天线旋转机构外壳上的圆周角度0度标识重合;
18.步骤1.5:卫星导航接收机初始定位,获得定位信息,分别将定位信息送至控制部分;
19.步骤1.6:控制部分在获得定位信息后,分别记录此时的差波束天的零点波束指向角度;
20.步骤1.6:控制部分分别将定位信息和零点波束指向角度一起送至存储部分存储。
21.所述步骤3的具体步骤为:
22.步骤3.1:控制部分分别控制卫星导航接收机的模数转换部分,使其输出全0或全1,从而卫星导航接收机无法接收到有效的数据而失锁;
23.步骤3.2:控制部分分别控制天线旋转机构旋转,旋转的角度约为差波束天线的-30db波束宽度的一半,并记录此时的差波束天线零点波束指向角度;
24.步骤3.3:待差波束天线旋转完毕后,控制部分分别控制卫星导航接收机的模数转换部分正常工作,使卫星导航接收机重新进行捕获跟踪和解算;
25.步骤3.4:控制部分在获得定位信息后,分别将定位信息和零点波束指向角度一起送至存储部分存储;
26.步骤3.5:控制部分分别控制天线旋转机构旋转一周,记录每一个测量点的定位信息和零点波束指向角度。
27.所述空间存在欺骗干扰信号后进行抑制的具体步骤为:
28.步骤4.1:控制部分分别从存储部分读取每一测量点的定位数据,并对数据进行对比,当发现某一角度的定位数据不同于其它角度的定位数据时,则说明有卫星导航欺骗信号,此时的定位数据不可信;
29.步骤4.2:控制部分分别读取异常数据对应的差波束天线的零点波束指向角度,控制天线旋转机构旋转差波束天线,使其零点波束指向异常定位数据对应的角度;
30.步骤4.3:控制部分分别控制卫星导航接收机重新进行捕获跟踪和解算,获得相应的定位信息;
31.步骤4.4:控制部分之间进行当前定位信息的共享,利用获得的定位信息计算卫星导航接收机之间的距离;
32.步骤4.5:控制部判断计算所得间隔距离与实际间隔间距的差值是否小于设定阈值,若差值是否小于设定阈值,则说明此时差波束天线零点波束指向的是欺骗干扰来向,利用差波束天线的方向性将欺骗信号抑制,达到反欺骗干扰从而正常定位的目的。
33.本发明还提供一种基于差波束天线的卫星导航反欺骗装置,包含接收机1、接收机2,两个接收机均使用差波束天线,天线安装在旋转机构上,可实现天线的360
°
旋转。
34.本发明的有益效果在于:
35.第一,由于采取的是一种卫星导航反欺骗的方法与装置,无需如同现有的部分借助多种运算机器的软件解决方案一样采取复杂的反欺骗算法,易于实现,解决了现有应用所需算法复杂、设计算法成本高的问题;
36.第二,由于采取的方法对于现有卫星导航设备通用性高,无需更改现有大批量部署应用的卫星导航接收机终端,只需更换天线和程序升级就能达到反欺骗的目的,解决了现有卫星导航设备为增加反欺诈功能而升级成本高的难题。
附图说明
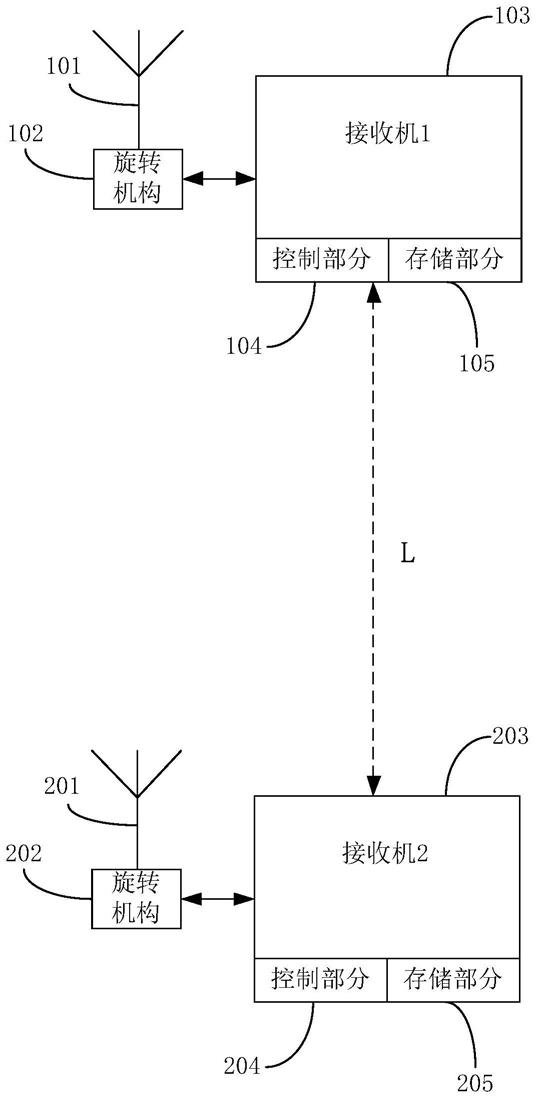
37.图1是本发明卫星导航接收系统的示意图。
38.其中,101-差波束天线1,102-天线旋转机构1,103-接收机1,104-控制部分1,105-存储部分1,201-差波束天线2,202-天线旋转机构2,203-接收机2,204-控制部分2,205-存储部分2。
具体实施方式
39.下面结合附图和实施例对本发明进一步说明。
40.本发明卫星导航反欺骗方法的步骤如下:
41.步骤1,设置接收机103和203间隔一固定间距,对卫星导航接收机103和203开机初始定位,获得定位信息;
42.步骤2,接收机103的控制部分104、接收机203的控制部分204在获得定位信息后,将定位信息分别送至存储部分105和205存储。
43.具体过程如下:
44.a1:分别对差波束天线101和201进行标定,标定其零点波束相对于天线结构的指向(只需进行一次);
45.a2:在天线旋转机构102和202的外壳上制作圆周角度标示(只需进行一次);
46.a3:设置接收机103和203间隔一固定间距,该间隔的大小和接收机精度相关,由于本发明所用接收机是基于北斗地基增强系统实现定位的,其精度可达亚米级、厘米级、后处理毫米级精度,因此该固定间距至少需大于1米,3米及以上最佳。
47.a4:卫星导航接收机103、203开机后,控制部分104、204分别控制天线旋转机构102、202旋转,分别使差波束天线101、201的零点波束指向标识和天线旋转机构102、202外壳上的圆周角度0度标识重合;
48.a5:卫星导航接收机103、203初始定位,获得定位信息,分别将定位信息送至控制部分104、204;
49.a6:控制部分104、204在获得定位信息后,分别记录此时的差波束天线101、201零点波束指向角度;
50.a6:控制部分104、204分别将定位信息和零点波束指向角度一起送至存储部分105、205存储。
51.步骤3,控制部分104、204分别控制卫星导航接收机103、203的模数转换部分使其停止工作,造成卫星导航接收机103、203失锁;
52.步骤4,控制部分104、204分别控制天线旋转机构102、202旋转差波束天线101、201至一定角度,然后控制部分104、204控制卫星导航接收机103、203的模数转换部分开始工作,使卫星导航接收机103、203重新进行捕获跟踪和解算,并分别将定位信息送至存储部分105、205存储。
53.具体过程如下:
54.b1:控制部分104、204分别控制卫星导航接收机103、203的模数转换部分,使其输出全0或全1,从而卫星导航接收机103、203无法接收到有效的数据而失锁;
55.b2:控制部分104、204分别控制天线旋转机构102、202旋转,旋转的角度约为差波束天线101、201的-30db波束宽度的一半,并记录此时的差波束天线101、201零点波束指向角度;
56.b3:待差波束天线101、201旋转完毕后,控制部分104、204分别控制卫星导航接收机103、203的模数转换部分正常工作,使卫星导航接收机103、203重新进行捕获跟踪和解算;
57.b4:控制部分104、204在获得定位信息后,分别将定位信息和零点波束指向角度一起送至存储部分105、205存储;
58.b5:控制部分104、204分别控制天线旋转机构102、202旋转一周,记录每一个测量点的定位信息和零点波束指向角度。
59.步骤5,控制部分104、204分别从存储部分105、205读取每一测量点的定位数据,并对数据进行对比,由于接收机是基于北斗地基增强系统实现定位的,精度可达亚米级、厘米级、后处理毫米级精度,当发现某一角度(差波束天线零点波束指向)的定位数据异常于其它角度的定位数据时,则说明有卫星导航欺骗信号,此时的定位数据不可信。
60.步骤6:接收机1和2的控制部分分别控制旋转机构旋转差波束天线,使其零点波束指向定位数据异常于其它角度的方向,待定位后,利用定位数据计算接收机1和2之间的间隔,若是间隔距离接近实际间隔间距,则说明此时差波束天线零点波束指向的是欺骗干扰来向,利用差波束天线的方向性将欺骗信号抑制,达到反欺骗正常定位的目的。
61.c1:控制部分104、204分别从存储部分105、205读取每一测量点的定位数据,并对数据进行对比,由于接收机是基于北斗地基增强系统实现定位的,精度可达亚米级、厘米级、后处理毫米级精度,当发现某一角度(差波束天线零点波束指向)的定位数据异常于其
它角度的定位数据时,则说明有卫星导航欺骗信号,此时的定位数据不可信;
62.c2:控制部分104、204分别读取异常数据对应的差波束天线101、201的零点波束指向角度,控制天线旋转机构102、202旋转差波束天线101、201,使其零点波束指向异常定位数据对应的角度;
63.c3:控制部分104、204分别控制卫星导航接收机103、203重新进行捕获跟踪和解算,获得相应的定位信息;
64.c4:控制部分104、204之间进行当前定位信息的共享,利用获得的定位信息计算卫星导航接收机103、203之间的距离;
65.c5:控制部分104或204判断计算出的卫星导航接收机103、203间隔距离是否接近实际间隔间距,若接近,则说明此时差波束天线零点波束指向的是欺骗干扰来向,利用差波束天线的方向性将欺骗信号抑制,达到反欺骗干扰从而正常定位的目的。
66.一种基于差波束天线的卫星导航反欺骗装置,包含接收机1、接收机2,两个接收机均使用差波束天线,天线安装在旋转机构上,可实现天线的360
°
旋转。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1