1.本技术涉及超声测速技术领域,具体而言,涉及一种超声测速装置及超声测速设备。
背景技术:2.液态金属内部流速的精确测量一直以来都是学术界的研究热点。但是液态金属不透明的特性,阻碍着诸多非接触式光学测量方法的应用,使得一些常用的流场测量方式都无法对液态金属内部流程做到精确地测量。
3.目前液态金属内部流速的测量常采用超声波多普勒测速法,发明人在研究中发现,采用超声波多普勒测速法虽然能够通过单列探头获得超声波发射方向的一维速度,但是如果要得到较高空间分辨率的速度测量,多个探头需要依次紧密排列,但是该方式会使得探头之间出现超声波信号干扰问题。而若是将相邻的探头以固定的时间差交替进行工作,能够一定程度上的避免探头之间超声波信号的干扰,但是却极大地降低了速度测量时间分辨率。
技术实现要素:4.本技术实施例的目的在于提供一种超声测速装置及超声测速设备,进而在降低探头之间超声信号的干扰的同时,保证速度测量具有较高的时间分辨率及空间分辨率。
5.本发明是这样实现的:
6.第一方面,本技术实施例提供一种超声测速装置,用于测量液态金属内部流速,包括:第一线性超声波阵列,包括依次排列的多个第一超声波探头,所述多个第一超声波探头均用于连接第一超声测速仪主机,所述多个第一超声波探头用于接收所述第一超声测速仪主机发送的不同的激励信号,并基于不同的激励信号同时发射出超声波进行测量。
7.在本技术实施例中,第一线性超声波阵列中的探头通过接收不同的激励信号,进而产生与该激励信号对应的超声波,然后各探头同时发射出超声波进行测量。由于超声波的不同,因此,该方式可以降低单列探头之间由于发射相同的超声波所带来的信号干扰问题,同时,由于第一线性超声波阵列中的各探头依次排列,且同时发射出超声波进行测量,可以保证一维测速过程具有较高的时间分辨率和空间分辨率。
8.结合上述第一方面提供的技术方案,在一些可能的实现方式中,所述装置还包括:第二线性超声波阵列,包括依次排列的多个第二超声波探头,所述多个第二超声波探头均用于连接第二超声测速仪主机,所述多个第二超声波探头用于接收所述第二超声测速仪主机发送的不同的激励信号,并基于不同的激励信号同时发射出超声波进行测量;其中,所述第一线性超声波阵列与所述第二线性超声波阵列垂直设置。
9.在本技术实施例中,超声测速装置还设置有与第一线性超声波阵列垂直的第二线性超声波阵列。第二线性超声波阵列中各探头依次排列,且各探头通过接收不同的激励信号,进而产生与该激励信号所对应的超声波,然后各探头同时发射出超声波进行测量。通过
上述方式可以保证二维测速过程具有较高的时间分辨率和空间分辨率。
10.结合上述第一方面提供的技术方案,在一些可能的实现方式中,所述第一超声波探头上的晶振单元与所述第二超声波探头上的晶振单元的频率不同。
11.在本技术实施例中,由于第一超声波探头上的晶振单元与第二超声波探头上的晶振单元的频率不同,进而使得两个阵列上的探头产生完全不同特征的超声信息,进而保证各探头在接收超声波返回的回声时可以根据探头本身特征接收与自己发射的超声频率相一致的回声,排除了互相垂直的超声波阵列同时工作时产生的超声波信号干扰。
12.结合上述第一方面提供的技术方案,在一些可能的实现方式中,所述第一超声波探头上的晶振单元的频率范围为2~10mhz;所述第二超声波探头上的晶振单元的频率范围为2~10mhz。
13.结合上述第一方面提供的技术方案,在一些可能的实现方式中,所述第一超声波探头上的晶振单元的频率为8mhz;所述第二超声波探头上的晶振单元的频率为6mhz。
14.结合上述第一方面提供的技术方案,在一些可能的实现方式中,所述第一超声波探头的数量与所述第二超声波探头的数量相同,且所述第一超声波探头的数量范围为16~64个;所述第二超声波探头的数量范围为16~64个。
15.在本技术实施例中,第一超声波探头的数量与第二超声波探头的数量相同且控制在16~64个,以满足液态金属内部流速的测量需求。
16.结合上述第一方面提供的技术方案,在一些可能的实现方式中,所述第一超声波探头和所述第二超声波探头上的晶振单元的横向尺寸范围均为1-4mm。
17.由于两个阵列的探头为依次排列,因此,超声波探头的晶振单元的横向尺寸则对应速度测量的空间分辨率,则在本技术实施例中,将第一超声波探头和第二超声波探头上的晶振单元的横向尺寸的尺寸范围设定为1-4mm,以保证速度测量具有较大的空间分辨率。
18.结合上述第一方面提供的技术方案,在一些可能的实现方式中,所述第一超声波探头和所述第二超声波探头上的晶振单元的横向尺寸均为3mm。
19.在本技术实施例中,第一超声波探头和所述第二超声波探头上的晶振单元的横向尺寸均为3mm,进而可以获得具有3mm
×
3mm空间分辨率的二维速度场信息。
20.第二方面,本技术实施例提供一种超声测速设备,用于测量液态金属内部流速,包括:第一线性超声波阵列,包括依次排列的多个第一超声波探头;第一超声测速仪主机,与所述多个第一超声波探头连接,用于向所述多个第一超声波探头发送的不同的激励信号,以使所述多个第一超声波探头基于不同的激励信号同时发射出超声波进行测量。
21.结合上述第二方面提供的技术方案,在一些可能的实现方式中,所述超声测速设备还包括:第二线性超声波阵列;包括依次排列的多个第二超声波探头;其中,所述第一线性超声波阵列与所述第二线性超声波阵列垂直设置;第二超声测速仪主机,与所述多个第二超声波探头连接,用于向所述多个第二超声波探头发送的不同的激励信号,以使所述多个第二超声波探头基于不同的激励信号同时发射出超声波进行测量。
附图说明
22.为了更清楚地说明本技术实施例的技术方案,下面将对本技术实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看
作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
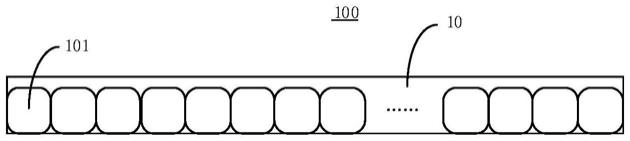
23.图1为本技术实施例提供的一种超声测速装置的结构示意图。
24.图2为本技术实施例提供的另一种超声测速装置的结构示意图。
25.图3为本技术实施例提供的一种超声测速设备的结构示意图。
26.图4为本技术实施例提供的另一种超声测速设备的结构示意图。
27.图标:100-超声测速装置;10-第一线性超声波阵列;101-第一超声波探头;20-第二线性超声波阵列;201-第二超声波探头;200-超声测速设备;30-第一超声测速仪主机;40-数据处理设备;50-第二超声测速仪主机。
具体实施方式
28.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描述。
29.请参阅图1,本技术实施例提供一种超声测速装置100。超声测速装置100用于测量液态金属内部流速。在结构上超声测速装置100包括:第一线性超声波阵列10。
30.其中,第一线性超声波阵列10包括依次排列的多个第一超声波探头101。
31.其中,依次排列表示多个第一超声波探头101依次紧密排列。
32.多个第一超声波探头101均用于连接第一超声测速仪主机。多个第一超声波探头101用于接收第一超声测速仪主机发送的不同的激励信号,并基于不同的激励信号同时发射出超声波进行测量。
33.需要说明的是,此处的不同的激励信号可以是,但不限于信号的频率不同、振幅不同、脉冲宽度不同。相应的,不同的激励信号也可以指的不同的波形,如方波信号、正弦波信号。第一超声波探头101在接收到激励信号后,基于该激励信号发射出与之对应的超声波进行测量。
34.示例性的,采用第一线性超声波阵列10进行流速测量的具体过程为:第一超声测速仪主机向多个第一超声波探头101发送不同的激励信号,各个第一超声波探头101接收到激励信号后,发射出与激励信号所对应的超声波。然后,各个第一超声波探头101再接收返回来的超声波,进而生成超声波回声信号。最后,各个第一超声波探头101将超声波回声信号发送至第一超声测速仪主机,以使第一超声测速仪主机将超声波回声信号发送至数据处理设备。数据处理设备基于超声波回声信号得到液态金属内部的一维流速。
35.可见,在本技术实施例中,第一线性超声波阵列中的探头通过接收不同的激励信号,进而产生与该激励信号所对应的超声波,然后各探头同时发射出超声波进行测量。由于超声波的不同,因此,该方式可以降低单列探头之间由于发射相同的超声波所带来的信号干扰问题,同时,由于第一线性超声波阵列中的各探头依次排列,且同时发射出超声波进行测量,可以保证一维测速过程具有较高的时间分辨率和空间分辨率。
36.而为了提高对液态金属内部的二维流速测量的时间分辨率和空间分辨率,可选地,请参阅图2,超声测速装置100还包括第二线性超声波阵列20。
37.其中,第二线性超声波阵列20,包括依次排列的多个第二超声波探头201。依次排列表示多个第二超声波探头201依次紧密排列。
38.多个第二超声波探头201均用于连接第二超声测速仪主机。多个第二超声波探头
201用于接收第二超声测速仪主机发送的不同的激励信号,并基于不同的激励信号同时发射出超声波进行测量。
39.需要说明的是,第一线性超声波阵列10与第二线性超声波阵列20垂直设置。
40.一实施例中,第一线性超声波阵列10可以作为x方向线性超声波阵列,进而使得第一线性超声波阵列10中的第一超声波探头101用以测量液态金属内部x方向的一维流速。而第二线性超声波阵列20可以作为y方向线性超声波阵列,进而使得第二线性超声波阵列20中的第二超声波探头201用以测量液态金属内部y方向的一维流速。
41.当然,也可以是第一线性超声波阵列10可以作为y方向线性超声波阵列,而第二线性超声波阵列20可以作为x方向线性超声波阵列,本技术不作限定。
42.同样的,对于第二超声测速仪主机发送的不同的激励信号,其可以是信号的频率不同、振幅不同、脉冲宽度不同。相应的,不同的激励信号也可以指的不同的波形,如方波信号、正弦波信号。第二超声波探头201在接收到激励信号后,基于该激励信号发射出与之对应的超声波进行测量。
43.示例性的,采用第一线性超声波阵列10及第二线性超声波阵列20进行流速测量的具体过程为:第一超声测速仪主机向多个第一超声波探头101发送不同的激励信号,各个第一超声波探头101接收到激励信号后,发射出与激励信号所对应的超声波。然后,各个第一超声波探头101再接收返回来的超声波,进而生成第一超声波回声信号。各个第一超声波探头101将第一超声波回声信号发送至第一超声测速仪主机,以使得第一超声测速仪主机将第一超声波回声信号发送至数据处理设备。数据处理设备基于第一超声波回声信号得到液态金属内部x方向的一维流速。
44.第二超声测速仪主机向多个第二超声波探头201发送不同的激励信号,各个第二超声波探头201接收到激励信号后,发射出与激励信号所对应的超声波。然后,各个第二超声波探头201再接收返回来的超声波,进而生成第二超声波回声信号。各个第二超声波探头201将第二超声波回声信号发送至第二超声测速仪主机,以使得第二超声测速仪主机将第二超声波回声信号发送至数据处理设备。数据处理设备基于第二超声波回声信号得到液态金属内部y方向的一维流速。
45.最后,数据处理设备再基于液态金属内部x方向的一维流速和液态金属内部x方向的一维流速进行矢量合成,以得到液态金属内部二维速度。
46.可见,在本技术实施例中,超声测速装置100还设置有与第一线性超声波阵列10垂直的第二线性超声波阵列20。第二线性超声波阵列20中各探头依次排列,且各探头通过接收不同的激励信号,进而产生与该激励信号所对应的超声波,然后各探头同时发射出超声波进行测量。通过上述方式可以保证二维测速过程具有较高的时间分辨率和空间分辨率。
47.当超声测速装置100同时包括第一线性超声波阵列10和第二线性超声波阵列20时,为了排除互相垂直的超声波阵列同时工作时产生的超声波信号干扰。于本技术实施例中,将第一超声波探头101上的晶振单元与第二超声波探头201上的晶振单元的频率设置为不同。
48.由于第一超声波探头101上的晶振单元与第二超声波探头201上的晶振单元的频率不同,进而使得两个阵列上的探头产生完全不同特征的超声信息,进而保证各探头在接收超声波返回的回声时可以根据探头本身特征接收与自己发射的超声频率相一致的回声。
49.可选地,第一超声波探头101上的晶振单元的频率范围和第二超声波探头201上的晶振单元的频率范围可以均为2~10mhz(波动频率单位,兆赫兹)。但是需保证二者频率在数值上不同,比如第一超声波探头101上的晶振单元的频率可以是8mhz,而第二超声波探头201上的晶振单元的频率可以是6mhz。又比如第一超声波探头101上的晶振单元的频率可以是6mhz,而第二超声波探头201上的晶振单元的频率可以是4mhz。本技术在数值上不作限定。
50.而为了满足液态金属内部流速的测量需求,第一超声波探头101的数量与第二超声波探头201的数量相同,且第一超声波探头101的数量范围和第二超声波探头201的数量范围均为16~64个。比如,第一超声波探头101的数量范围和第二超声波探头201的数量均为64个或32个。
51.此外,在第一超声波探头101和第二超声波探头201上的晶振单元的尺寸设计上,晶振单元的横向尺寸范围均为1-4mm(长度单位:毫米)。
52.需要说明的是,由于两个阵列的探头为依次排列,因此,超声波探头的晶振单元的横向尺寸则对应速度测量的空间分辨率,则在本技术实施例中,将第一超声波探头101和第二超声波探头201上的晶振单元的横向尺寸的尺寸范围设定为1-4mm,以保证速度测量具有较大的空间分辨率。
53.在本技术实施例中,第一超声波探头101和第二超声波探头201上的晶振单元的横向尺寸均为3mm。进而可以获得具有3mm
×
3mm空间分辨率的二维速度场信息。
54.请参阅图3,基于同一发明构思,本技术实施例提供一种超声测速设备200,用于测量液态金属内部流速,超声测速设备200在结构上包括:
55.第一线性超声波阵列10,其包括依次排列的多个第一超声波探头101。
56.第一超声测速仪主机30,与多个第一超声波探头101连接,用于向多个第一超声波探头101发送的不同的激励信号,以使多个第一超声波探头101基于不同的激励信号同时发射出超声波进行测量。
57.一实施例中,第一超声测速仪主机30包括超声激励模块,超声激励模块用于生成激励信号。超声激励模块可以具体包括函数发生器。函数发生器可以是任意的型号,只要能生成满足实际使用需求的激励信号即可,此处不做限定。
58.此外,超声激励模块还可以包括功率放大器,当函数发生器生成初始激励信号后,功率放大器用于放大该初始激励信号,得到激励信号,并输出该激励信号。功率放大器的放大倍数可以根据实际需求设置,此处也不作限定。
59.当然,上述的超声测速设备200也可以包括数据处理设备40。数据处理设备40与第一超声测速仪主机30连接,用于根据第一超声测速仪主机30返回的信号进行处理,以得到液态金属内部的一维流速。
60.数据处理设备40可以是终端或者服务器,终端可以是,但不限于个人计算机(personalcomputer,pc)、智能手机、平板电脑、个人数字助理(personal digital assistant,pda)、移动上网设备(mobile internet device,mid)等。服务器可以是但不限于网络服务器、数据库服务器、云服务器或由多个子服务器构成的服务器集成等。当然,上述列举的设备仅用于便于理解本技术实施例,其不应作为对本实施例的限定。
61.示例性的,超声测速设备200的具体测速过程为:第一超声测速仪主机30向多个第
一超声波探头101发送不同的激励信号,各个第一超声波探头101接收到激励信号后,发射出与激励信号所对应的超声波。然后,各个第一超声波探头101再接收返回来的超声波,进而生成超声波回声信号。最后,各个第一超声波探头101将超声波回声信号发送至第一超声测速仪主机30,以使第一超声测速仪主机30将超声波回声信号发送至数据处理设备40。数据处理设备40基于超声波回声信号得到液态金属内部的一维流速。
62.请参阅图4,可选地,所述超声测速设备200还包括:第二线性超声波阵列20及第二超声测速仪主机50。
63.第二线性超声波阵列20包括依次排列的多个第二超声波探头201。其中,第一线性超声波阵列10与第二线性超声波阵列20垂直设置。
64.第二超声测速仪主机50,与多个第二超声波探头201连接,用于向多个第二超声波探头201发送的不同的激励信号,以使多个第二超声波探头201基于不同的激励信号同时发射出超声波进行测量。
65.一实施例中,第二超声测速仪主机50包括超声激励模块,超声激励模块用于生成激励信号。超声激励模块可以具体包括函数发生器。函数发生器可以是任意的型号,只要能生成满足实际使用需求的激励信号即可,此处不做限定。
66.此外,超声激励模块还可以包括功率放大器,当函数发生器生成初始激励信号后,功率放大器用于放大该初始激励信号,得到激励信号,并输出该激励信号。功率放大器的放大倍数可以根据实际需求设置,此处也不作限定。
67.上述的第二超声测速仪主机50也与数据处理设备40连接,数据处理设备40用于根据第二超声测速仪主机50返回的信号进行处理,以得到液态金属内部与第二超声波探头201的超声方向对应的一维流速。
68.示例性的,包含第二线性超声波阵列20及第二超声测速仪主机50的超声测速设备200的具体测速过程为:第一超声测速仪主机30向多个第一超声波探头101发送不同的激励信号,各个第一超声波探头101接收到激励信号后,发射出与激励信号所对应的超声波。然后,各个第一超声波探头101再接收返回来的超声波,进而生成第一超声波回声信号。各个第一超声波探头101将第一超声波回声信号发送至第一超声测速仪主机30,以使得第一超声测速仪主机30将第一超声波回声信号发送至数据处理设备40。数据处理设备40基于第一超声波回声信号得到液态金属内部x方向的一维流速。
69.第二超声测速仪主机50向多个第二超声波探头201发送不同的激励信号,各个第二超声波探头201接收到激励信号后,发射出与激励信号所对应的超声波。然后,各个第二超声波探头201再接收返回来的超声波,进而生成第二超声波回声信号。各个第二超声波探头201将第二超声波回声信号发送至第二超声测速仪主机50,以使得第二超声测速仪主机50将第二超声波回声信号发送至数据处理设备40。数据处理设备40基于第二超声波回声信号得到液态金属内部y方向的一维流速。
70.最后,数据处理设备40再基于液态金属内部x方向的一维流速和液态金属内部x方向的一维流速进行矢量合成,以得到液态金属内部二维速度。
71.此外,需要说明的是,由于第一线性超声波阵列10和第二线性超声波阵列20在前述实施例中已有详细说明,因此,为了避免累赘,此处不作赘述。
72.在本技术的描述中,需要说明的是,术语“内”、“外”等指示的方位或位置关系为基
于附图所示的方位或位置关系,或者是该申请产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
73.还需要说明的是,除非另有明确的规定和限定,术语“设置”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
74.以上所述仅为本技术的实施例而已,并不用于限制本技术的保护范围,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。