一种基于复合式纹影技术的可压缩雷诺应力测量系统的制作方法
1.本发明属于雷诺应力测量系统技术领域,具体涉及一种基于复合式纹影技术的可压缩雷诺应力测量系统。
背景技术:
2.流体作湍流运动时所产生的应力,除了粘性应力外尚有附加的应力,包括法向附加应力和切向附加应力,这些附加的应力都是湍流所特有的,是由于流体质点的脉动产生的,称为雷诺应力。雷诺应力是一个张量,形式如下,包括正应力和切应力;(三维);(二维)。
3.在求解流体navier-stokes方程时,为了封闭方程组,需要对雷诺应力进行建模。但是关于雷诺应力的建模或模拟并不是件简单的事。因为流动是非常复杂的,在不同的条件下,单一的建模难以适合各种情况,从而产生了不同的模拟雷诺应力的方法。为了验证学术界对雷诺应力模拟或建模方法的准确性,需要从实验上进行测量。注意到雷诺应力的形式,包括了速度脉动和密度,而且必须是同一个测点位置、同一时间的速度脉动和密度值。对于流动而言,当速度较低的时候,一般马赫数低于0.3,认为是低速不可亚缩流动,密度变化忽略不计,因此这个时候雷诺应力可以只关注速度脉动,借助高频的速度测量技术,可以得到速度脉动,如用激光多普勒测速仪。而当流动的速度高于马赫数0.3时,密度的变化不可忽略,流动是可压缩的,此时要准确测量雷诺应力,就必须测量同一时间、同一位置的速度脉动和密度值。由于速度高了,流动的可压缩性不可忽略,速度和密度耦合,不能单独分别测量速度或密度,然后做简单的乘积。所以,这种情况下,雷诺应力的测量就变得极为困难。高速流体的可压缩雷诺应力测量对于高速飞行器的设计、空气动力学理论发展都非常重要。
4.目前能够同时、同一位置测量可压缩雷诺应力的光学测量技术几乎没有真正意义上存在。因为气体密度的测量是非常困难的。国防科大的易仕和教授提出用npls测量可压缩雷诺应力的方法,是目前所知的唯一办法,有相关文献和专利。但是该方法也存在问题,首先npls技术是需要在气流中播撒纳米示踪粒子,示踪粒子跟随气流运动,通过测量示踪粒子的速度来等效于测到了气流速度,再假设粒子的浓度与气流的密度成正比,经过校准后得到密度。目前示踪粒子是否能真实跟随气流,粒子浓度是否可靠地反映气流密度,是业内讨论的焦点。而且在有些场合,是不允许播撒示踪粒子的,因为粒子会对操作人员的身体
健康或设备造成伤害。另外,npls是用相机采集示踪粒子被激光照射而散射出来的光,相机将这些光以图片的形式记录并存储下来。实际上,它是利用粒子的图像(亮度或灰度)作为输入信号进行分析,从而得到速度和密度。那么由于激光的入射、粒子的散射均存在较多的影响因素,因此最终得到的结果往往误差较大。目前业内由于暂无其他方法,只能采用npls技术。
5.其他单独测量速度的技术,比如piv、ldv、热线等,只能得到速度值。而测量气流密度的技术,比如干涉、背景纹影(bos)。这些技术都只能得到速度或密度单一数据。学术界在缺乏手段的情况下,对研究进行了很多简化和近似,勉强用速度和密度分别测量得到的数据进行分析和建模。
6.因此,开发一种能够真正意义上实现同时、同一位置测量速度、密度的测量技术,才能真正建立雷诺应力的正确模拟。
技术实现要素:
7.为了解决现有技术存在的上述问题,本发明的目的在于提供一种基于复合式纹影技术的可压缩雷诺应力测量系统。
8.本发明所采用的技术方案为:一种基于复合式纹影技术的可压缩雷诺应力测量系统,包括按照光线从发射到接收的顺序依次布置的光源子系统、第一主反射镜、第二主反射镜、成像子系统,光源子系统、第一主反射镜、第二主反射镜、成像子系统的连线呈z字形,成像子系统包括四棱锥刀口。
9.第一主反射镜和第二主反射镜构成了一个4f缩束系统,四棱锥刀口放置在其共焦平面上。四棱锥刀口利用“屋脊”形状的透射棱锥代替纹影仪的刀口,通过四棱锥后的光束形成四个子光斑,四个光斑中同一坐标点的光强之差反映该点的波前斜率,可以实现不需要更换元件,就可以定量获得光线穿过流场的波前信号,与夏克-哈特曼(sh)传感器提取数据方法类似,但是采样率至少提高4倍以上。通过四棱锥测量的高空间分辨率的动态波前信号可以获取流场结构,并能进一步分析流动的机理,分析密度值分布。
10.激光器可以发出多序列脉冲,每一个激光脉冲就可以在四棱锥刀口下一次性得到四副图像。如果激光器在时间间隔很短的情况下连续发出2个脉冲,就可以得到两组结果。由于激光器的脉冲只有10ns,这两组结果中的8幅图像可以精细地分辨出流动的结构。任选同一方向上的相邻两个脉冲时的图像进行对比分析,用互相关算法或者光流法进行计算,从而得到对应的速度值。
11.对可压缩流动雷诺应力的测量,需要得到同一时间、同一空间的速度和密度值。由于本发明中,速度和密度的值就是从同一套数据中分析出来的,就保证了时间和空间的统一。
12.z字型布局的好处是对于长焦距、大口径的主反射镜,光路更加紧凑、同时消除主镜加工产生的球差,最终提高成像和雷诺应力的计算精度。
13.作为本发明的优选方案,所述光源子系统和第一主反射镜的连线与第一主反射镜和第二主反射镜的连线的夹角为3~7
°
,第一主反射镜和第二主反射镜的连线与第二主反射镜和成像子系统的连线的夹角为3~7
°
。两条折线与主光路之间的夹角应该控制在5
°
左右,这样既不影响设备摆放,又能减小光学畸变。
14.作为本发明的优选方案,所述光源子系统包括设置于平板上的两个相互正交的光源系统滑轨,其中一个光源系统滑轨上安装有依次设置的脉冲激光器、光路合束镜、光阑和第一平面反射镜,另一个光源系统滑轨上安装有led光源发生器,脉冲激光器和led光源发生器发出的光线均投射到光路合束镜上。合束镜的作用是将两个不同的光源发生器发出的光线一起导入到平面反射镜。合束镜的两面各镀了不同的膜,对着脉冲激光器的那一面,镀的膜要增加激光的投射率,而对着led光源发生器那一面则镀的是使led光反射的膜。这样,可使两种光在合束镜这个位置进行融合。经光路合束镜后,光纤经光阑和第一平面反射镜到达第一主反射镜。
15.作为本发明的优选方案,所述脉冲激光器发出的激光与led光源发生器发出的光线的波长不同。合束镜的作用是将两个不同的光源发生器发出的光线一起导入到平面反射镜。为了实现这个目的,必须使脉冲激光器发出的激光与led光源发生器发出的光线的波长不同。比如激光器的波长是532nm,led的波长是550~570nm。
16.作为本发明的优选方案,所述光阑位于第一主反射镜的焦点位置。光阑要摆放在第一主反射镜的焦点位置,首先是起到空间滤波的作用,使合束镜发出的光经过滤波后更加优质,从而提高光斑质量。其次是滤波之后等效于一个二次光源,对于整个系统而言,可以近似认为所有的光都是从这个点发出的。
17.作为本发明的优选方案,所述脉冲激光器包括激光器主机,激光器主机连接有导光臂,导光臂连接有脉冲激光发射部件,脉冲激光发射部件滑动连接于光源系统滑轨上。
18.作为本发明的优选方案,所述成像子系统包括设置于另一块平板上的成像系统滑轨,四棱锥刀口安装于成像系统滑轨上,成像系统滑轨上还安装有依次设置的第二平面反射镜和第一相机,第二平面反射镜、四棱锥刀口和第一相机依次设置,四棱锥刀口的顶点位于第二主反射镜的焦距位置。
19.平面反射镜在接收到第二主反射镜的光线之后,光线进入四棱锥刀口。其中,四条棱边组成的“屋脊”状的透镜。其底面是平面,用于接收激光光线。“屋脊”的顶点刚好位于第二主反射镜的焦距位置。因此,二次光源在该焦距位置会形成一个像,该像被“屋脊”的四条边所切割,相当于有四个不同方向的常规刀口。由于切割的方向不同,就会出现四副不同纹影图像。四幅纹影图像各自携带了能够组合并分析出流场密度值的必要的光学信息。
20.作为本发明的优选方案,所述成像系统滑轨上还连接有常规刀口滑轨,常规刀口滑轨与成像系统滑轨正交,常规刀口滑轨上安装有常规刀口和第二相机,常规刀口位于第二主反射镜的焦点位置,成像系统滑轨上还滑动安装有分束镜,分束镜将两个不同波长的光分开分别进入四棱锥刀口和常规刀口。
21.常规刀口滑轨与成像系统滑轨相互正交,平面反射镜在接收到第二主反射镜的光线之后,将光线投至分束镜。分束镜将两个不同波长的光分开,分别进入四棱锥刀口和常规刀口。常规刀口,实际上是一个刀片状的结构,完全不透光。常规刀口的空间位置正好是第二主反射镜的焦点位置,因此在该处会出现二次光源的像。将刀口调节至遮挡二次光源像的50%的位置,在常规刀口这一路对应的相机在适当的长焦镜头下,可以拍到研究对象的纹影图像。常规刀口的纹影图像可作为初步判断,为四棱锥处产生的图像提供参考。
22.作为本发明的优选方案,所述四棱锥刀口的折射率1.846。
23.作为本发明的优选方案,所述四棱锥刀口的相邻两条棱的夹角为80
°
。
24.本发明的有益效果为:1.本发明的第一主反射镜和第二主反射镜构成了一个4f缩束系统,四棱锥刀口放置在其共焦平面上。四棱锥刀口利用“屋脊”形状的透射棱锥代替纹影仪的刀口,通过四棱锥后的光束形成四个子光斑,四个光斑中同一坐标点的光强之差反映该点的波前斜率,可以实现不需要更换元件,就可以定量获得光线穿过流场的波前信号,与夏克-哈特曼(sh)传感器提取数据方法类似,但是采样率至少提高4倍以上。通过四棱锥测量的高空间分辨率的动态波前信号可以获取流场结构,并能进一步分析流动的机理,分析密度值分布。
25.2.激光器可以发出多序列脉冲,每一个激光脉冲就可以在四棱锥刀口下一次性得到四副图像。如果激光器在时间间隔很短的情况下连续发出2个脉冲,就可以得到两组结果。由于激光器的脉冲只有10ns,这两组结果中的8幅图像可以精细地分辨出流动的结构。任选同一方向上的相邻两个脉冲时的图像进行对比分析,用互相关算法或者光流法进行计算,从而得到对应的速度值。
26.3.对可压缩流动雷诺应力的测量,需要得到同一时间、同一空间的速度和密度值。由于本发明中,速度和密度的值就是从同一套数据中分析出来的,就保证了时间和空间的统一。
27.4.本发明z字型布局的好处是对于长焦距、大口径的主反射镜,光路更加紧凑、同时消除主镜加工产生的球差,最终提高成像和雷诺应力的计算精度。
附图说明
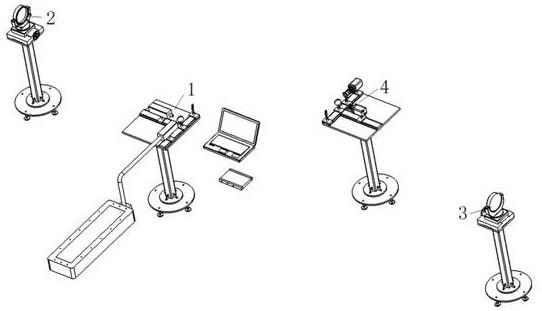
28.图1是本发明的结构示意图;图2是光源子系统的结构示意图;图3是成像子系统的结构示意图。
29.图中,1-光源子系统;2-第一主反射镜;3-第二主反射镜;4-成像子系统;11-光源系统滑轨;12-脉冲激光器;13-光路合束镜;14-光阑;15-第一平面反射镜;16-led光源发生器;41-四棱锥刀口;42-成像系统滑轨;43-第二平面反射镜;44-第一相机;45-常规刀口滑轨;46-常规刀口;47-第二相机;48-分束镜;121-激光器主机;122-导光臂;123-脉冲激光发射部件。
具体实施方式
30.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
31.如图1所示,本实施例的基于复合式纹影技术的可压缩雷诺应力测量系统,包括按照光线从发射到接收的顺序依次布置的光源子系统1、第一主反射镜2、第二主反射镜3、成像子系统4,光源子系统1、第一主反射镜2、第二主反射镜3、成像子系统4的连线呈z字形,成像子系统4包括四棱锥刀口41。
32.第一主反射镜2和第二主反射镜3构成了一个4f缩束系统,四棱锥刀口41放置在其共焦平面上。四棱锥刀口41利用“屋脊”形状的透射棱锥代替纹影仪的刀口,通过四棱锥后的光束形成四个子光斑,四个光斑中同一坐标点的光强之差反映该点的波前斜率,可以实
现不需要更换元件,就可以定量获得光线穿过流场的波前信号,与夏克-哈特曼(sh)传感器提取数据方法类似,但是采样率至少提高4倍以上。通过四棱锥测量的高空间分辨率的动态波前信号可以获取流场结构,并能进一步分析流动的机理,分析密度值分布。
33.激光器可以发出多序列脉冲,每一个激光脉冲就可以在四棱锥刀口41下一次性得到四副图像。如果激光器在时间间隔很短的情况下连续发出2个脉冲,就可以得到两组结果。由于激光器的脉冲只有10ns,这两组结果中的8幅图像可以精细地分辨出流动的结构。任选同一方向上的相邻两个脉冲时的图像进行对比分析,用互相关算法或者光流法进行计算,从而得到对应的速度值。
34.对可压缩流动雷诺应力的测量,需要得到同一时间、同一空间的速度和密度值。由于本发明中,速度和密度的值就是从同一套数据中分析出来的,就保证了时间和空间的统一。
35.z字型布局的好处是对于长焦距、大口径的主反射镜,光路更加紧凑、同时消除主镜加工产生的球差,最终提高成像和雷诺应力的计算精度。
36.其中,所述光源子系统1和第一主反射镜2的连线与第一主反射镜2和第二主反射镜3的连线的夹角为3~7
°
,第一主反射镜2和第二主反射镜3的连线与第二主反射镜3和成像子系统4的连线的夹角为3~7
°
。两条折线与主光路之间的夹角应该控制在5
°
左右,这样既不影响设备摆放,又能减小光学畸变。
37.光源子系统1:具体地,如图2所示,所述光源子系统1包括设置于平板上的两个相互正交的光源系统滑轨11,其中一个光源系统滑轨11上安装有依次设置的脉冲激光器12、光路合束镜13、光阑14和第一平面反射镜15,另一个光源系统滑轨11上安装有led光源发生器16,脉冲激光器12和led光源发生器16发出的光线均投射到光路合束镜13上。
38.光源子系统1集成在一个平板上,实际上这个平板外面还有个罩子,用于隔绝外部光线的干扰。注意到,在平板上有两个光源系统滑轨11,相互正交布置。在光源系统滑轨11上放置了两个光源发射部件。其中一个是脉冲激光发射部件123,脉冲激光发射部件123连接有导光臂122,导光臂122连接有激光器主机121。该激光器是一台多序列匀化脉冲激光器12,脉宽10ns,单脉冲能量20mj~200mj可调,波长532nm,可以是2~8序列,重复频率5~15hz,每个序列之间的时间间隔400ns~1s可调。具有特殊的匀化器,可以消除普通激光器的相干性,包括干涉条纹、散斑等影响测量的不利因素。另一个光源是led光源发生器16,其背后只是简单连接一个专用电源,可以是24v或36v直流电源适配器。led光源可以选择单色或4色,可以是小功率20w左右的普通led,也可以是大功率100w以上的led阵列。小功率用于一般研究用,大功率用于配套高速相机使用。由于高速相机是通过调整帧频和曝光时间来达到高速成像的目的,因此速度越高,单帧的进光量会越小,如果此时led的功率不够,则无法清晰成像。
39.合束镜的作用是将两个不同的光源发生器发出的光线一起导入到平面反射镜。为了实现这个目的,两个光源发生器发出的光线必须是不同波长。比如激光器的波长是532nm,led的波长是550~570nm。合束镜的两面各镀了不同的膜,对着脉冲激光发射部件123的那一面,镀的膜要增加激光的投射率,而对着led光源发生器16那一面则镀的是使led光反射的膜。这样一来,就可以将两种光在光路合束镜13这个位置进行融合。可以视为两种
光等同于是从光路合束镜13这个位置发出。由于采用了这种光路合束的方式,对于该系统的调试也需要有一定的特殊操作。通常光路合束镜13的摆放角度是与脉冲激光发射部件123和led光源发生器16分别成45
°
夹角。由于激光是直接从光路合束镜13投射过去,因此光路合束镜13的角度不会影响激光穿过脉冲激光器12,只要保证脉冲激光发射部件123、光路合束镜13、第一平面反射镜15在一条直线即可,而这一点可以通过光源系统滑轨11来保证。但是led的光却是在光路合束镜13的位置进行反射,这个时候就需要对光路合束镜13的角度进行调整。需要找到合适的角度,使led光源发生器16发出的led光准确反射到光阑14,不一定是45
°
。当然,45
°
在大多数情况下是可以使用的。从图2中可以看出,第一平面反射镜15反射出一道光线,这道光线会照亮第一主反射镜2。
40.第一平面反射镜15的角度摆放,把握一个原则:由于反射出的光是扩散的锥形光,当光线到达第一主反射镜2时会出现一个直径大于第一主反射镜2的光斑。要求光斑把第一主反射镜2完全、均匀照亮。实用的方法是调节第一平面反射镜15,使光斑的几何中心与第一主反射镜2的几何中心大致在一起。
41.光源子系统1整体要摆放在第一主反射镜2的焦点位置,其实具体的要求是光阑14要摆放在第一主反射镜2的焦点位置。它起到两个作用,一是空间滤波,使光路合束镜13发出的光经过滤波后更加优质,从而提高光斑质量。二是滤波之后等效于一个二次光源,对于整个系统而言,可以近似认为所有的光都是从这个点发出的。那么只要控制这个点的位置与第一主反射镜2的焦点位于同一位置,就可以满足系统的要求。但是,它能够被视为二次光源的条件是,两个发生器发出的光需要聚焦在光阑14处。那么,两个发生器在光源系统滑轨11上相对光阑14的距离是有要求的。即,激光器的头部凸起结构是一个透镜,该透镜使激光进行汇聚,当光阑14与透镜的距离满足透镜的焦距时,激光就能汇聚在光阑14处。对于led发生器也是同样的。
42.此时光阑14已经视为二次光源,可以认为是本系统全部光线的起点位置。在上述条件的保证下,从光源分系统发出的光经过第一主反射镜2反射后,就会形成平行光,就是第一主反射镜2与第二主反射镜3之间的主光路。该平行光穿过很长的距离,到达第二主反射镜3。在该光路过程中,是使用者放置测量对象的位置。也就是说,只要在平行光所经过的、所覆盖的区域,任意位置都可以放置研究对象。但一般来说,为了实用、美观,通常把对象放在平行光的居中位置。第二主反射镜3与第一主反射镜2是一模一样的,可以互换互用。
43.成像子系统4:具体地,如图3所示,所述成像子系统4包括设置于另一块平板上的成像系统滑轨42,四棱锥刀口41安装于成像系统滑轨42上,成像系统滑轨42上还安装有依次设置的第二平面反射镜43和第一相机44,第二平面反射镜43、四棱锥刀口41和第一相机44依次设置,四棱锥刀口41的顶点位于第二主反射镜3的焦距位置。
44.所述成像系统滑轨42上还连接有常规刀口滑轨45,常规刀口滑轨45与成像系统滑轨42正交,常规刀口滑轨45上安装有常规刀口46和第二相机47,常规刀口46位于第二主反射镜3的焦点位置,成像系统滑轨42上还滑动安装有分束镜48,分束镜48将两个不同波长的光分开分别进入四棱锥刀口41和常规刀口46。
45.第二主反射镜3将光线汇聚并照向成像子系统4。成像子系统4也有一个平板,上面承载了成像用的相关设备。其布局与光源子系统1是呼应的。首先也是两个相互正交的成像
系统滑轨42和常规刀口滑轨45,两个相机,第二平面反射镜43、分束镜48、四棱锥刀口41、常规刀口46。平面反射镜在接收到第二主反射镜3的光线之后,将光线投至分束镜48。分束镜48将两个不同波长的光分开,分别进入四棱锥刀口41和常规刀口46。
46.常规刀口46,实际上是一个刀片状的结构,完全不透光。常规刀口46的空间位置正好是第二主反射镜3的焦点位置,因此在该处会出现二次光源的像。常规刀口46是可以上下调节移动的,利用刀口锐利的边缘对二次光源的像进行切割(就是不同程度的遮挡)。一般来说,我们将刀口调节至遮挡二次光源像的50%的位置。在常规刀口46这一路对应的相机在适当的长焦镜头下,可以拍到研究对象的纹影图像。
47.所谓的纹影,是摄影学中的术语,原意是类似玻璃珠中的折纹。在空气动力学中,利用常规刀口46这种方式能够得到光线由于气流密度变化而发生的偏折所导致的明暗变化的条纹图像。这就是纹影图像。这种图像非常适合用于分析流动结构。
48.至于四棱锥刀口41,它是一个由四条棱边组成的“屋脊”状的透镜。其底面是平面,用于接收来自分束镜48的激光光线。“屋脊”的顶点刚好位于第二主反射镜3的焦距位置。因此,二次光源在该焦距位置会形成一个像,该像被“屋脊”的四条边所切割,相当于有四个不同方向的常规刀口46。由于切割的方向不同,就会出现四副不同纹影图像。其实此时的四副图像并不严格意义上的纹影图像了,只是从图像的效果来看,与纹影图像类似。四幅图像各自携带了能够组合并分析出流场密度值的必要的光学信息。这里我们直接认为由四棱锥刀口41作用之后,能够得到被测流场的密度。
49.对可压缩流动雷诺应力的测量,需要得到同一时间、同一空间的速度和密度值。现在流动结构和密度值有了,还需要同一时间和空间下的速度值,也就是要从四副图像中分析出速度。激光器可以发出多序列脉冲,每一个激光脉冲就可以在四棱锥刀口41下一次性得到四副图像(可以成为a1、b1、c1、d1),把这样的四副图像作为一组结果。如果激光器在时间间隔很短的情况下连续发出2个脉冲。就可以得到两组结果(a1、b1、c1、d1与a2、b2、c2、d2)。由于激光器的脉冲只有10ns,这两组结果中的8幅图像可以精细地分辨出流动的结构。所以,可以任选a1-a2或b1-b2等这样的成对图像进行对比分析。因为a1-a2是两幅时间间隔很短的流动结构图像,因此我们可以对二者进行对比分析,一般用互相关算法或者光流法进行计算,从而得到对应的速度值。因此,速度和密度的值就是从同一套数据中分析出来的,就保证了时间和空间的统一。
50.两个相机与各自刀口的距离不需要特殊设置,因为相机的镜头可以是变焦镜头,将相机摆放在任意位置,通过调节镜头焦距即可满足系统运行需要。
51.四棱锥刀口41的加工要求非常高:折射率1.846,zf53,面型要求pv=1/6波长,pv-rms=1/30波长。“屋脊”底角80
°
,各棱边尽可能尖锐,在电子显微镜下不能出现崩边或塌边。
52.主反射镜:具体要求如下:通光口径:100-1000mm;材料:k9;相对孔径比:1:10;镀膜:银+sio2;光学调节支架:具有高低,左右,旋转及俯仰调节;
可选择遮光筒式设计;面型精度:反射波前≤λ/4。
53.本发明不局限于上述可选实施方式,任何人在本发明的启示下都可得出其他各种形式的产品,但不论在其形状或结构上作任何变化,凡是落入本发明权利要求界定范围内的技术方案,均落在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1