一种隧道多断面视觉检测系统及自适应调整方法与流程
1.本发明涉及一种隧道断面视觉检测领域,特别是公开一种隧道多断面视觉检测系统及自适应调整方法,应用于隧道结构检测领域。
背景技术:
2.随着国内公路、地铁隧道的快速发展,隧道的运营规模越来越大。隧道在建设、营运过程中,受地面、周边建筑物负载、土体扰动等影响,隧道结构裂缝、渗漏水、剥落剥离等病害时有发生,影响隧道的运营安全。针对人工检测效率低、成本高等问题,研发基于机器视觉的隧道快速检测系统,搭载于车辆平台上,进行隧道结构表观病害快速采集。
3.基于机器视觉的隧道结构快速检测发展较快,市面上存在较多的方法。专利zl 201721445535.5公开了一种夜间隧道视觉检测系统,包括检测车、ccd摄像头和设备搭载模块,提高了成像效果与检测装置的检测效率。cn202110815077.4公开了一种隧道表观影响数据采集分析的新方法,将360
°
全景摄像机安装在隧道检验车,通过无线控制隧道检验车匀速行驶对隧道内部进行数据收集,存储于工控机内,在工控机内进行预处理后,无线发送给远程计算机。cn201720828598.2公开了一种隧道智能检测车,包括固定承载系统、视觉采集系统、车速测量系统、电气控制系统和安全警示系统,可以在正常行驶的情况下,实时采集车辆以及隧道衬砌表面的信息。其包含的视觉检测系统,均无法实现对不同隧道轮廓类型实现自适应,可能会存在拍摄不全面、成像不清晰的问题。
4.综上,故迫切需要一种适应多种隧道断面、成像范围与效果自动调整的视觉检测系统。
技术实现要素:
5.本发明的目的设计一种隧道多断面视觉检测系统及自适应调整方法,主要解决现有巡检装备无法自动适应不同隧道断面、焦距调整操作复杂、对人员技能要求高等技术问题。
6.本发明的目的可以通过以下技术方案来实现:一种隧道多断面视觉检测系统,
7.由视觉检测装置、移动平台、自动成像范围调整系统和电气柜组成,所述电气柜安装在移动平台中部,所述视觉检测装置安装在移动平台端部,包括若干工业相机、若干补光装置、激光扫描仪、视觉采集架,工业相机、补光装置间隔安装于视觉采集架上,用于获取不同轮廓断面的隧道结构表观图像,所述的激光扫描仪安装在移动平台另一侧;系统检测速度可达到80km/h以上。所述工业相机带有变焦镜头,变焦镜头设有镜头自动调节装置。所述工业相机为工业线阵相机或工业面阵相机。
8.自动成像范围调整系统分别与视觉检测装置和激光扫描仪信号传输连接,获取视觉检测装置与激光扫描仪获取的隧道轮廓信息,计算在当前轮廓下不同相机的焦距,同时结合图像灰度,自动调整曝光时间与光圈,并将计算数据进行存储、设定预置位,实现不同轮廓的全断面检测快速调整。
9.所述工业相机安装于视觉采集架上,与隧道断面平行,通过同步控制单元实现多相机同步拍摄;所述的镜头自动调节装置用于调节焦距、光圈、曝光时间;所述的补光装置与所述工业相机安装于同一平面,交替安装;所述的激光扫描仪安装在移动平台另一侧,其扫描范围不低于270
°
,扫描频率不低于50hz,系统误差不大于5mm,其扫描范围内不受遮挡。
10.视觉检测装置安装位置依据标准隧道检测指标要求设置,其覆盖范围起点记为mstr,终点位置记为mend,设定覆盖起点位置的工业相机编号为1,终点位置的工业相机编号为n,工业相机数量记为n,其焦距记为f,f∈{f1,f2......fn},并调整图像清晰成像;图像中心与相机成像中心距离记为dg,dg∈{dg1,dg2......dgn},相邻工业相机之间的重叠距离记为dg,一般dg设为30mm;选用变焦镜头的焦距范围为fminmm-fmaxmm;每个工业相机的光圈参数记为f,f∈{f1,f2......fn};每个工业相机在第k次,获取的图像记为img,img∈{img{k,1},img{k,2}......img{k,n}}。
11.一种隧道多断面视觉检测系统的自适应调整方法,包括自动焦距调整方法和自动曝光时间与光圈调整方法,其中自动焦距调整方法与激光扫描数据进行结合,调整焦距确保能覆盖检测的隧道断面;自动曝光时间与光圈调整方法与拍摄图像灰度及清晰度进行结合,调整曝光时间与光圈,确保成像效果最佳。
12.自动焦距调整方法包括以下5个步骤:
13.(1)获取当前隧道轮廓激光扫描数据,并将异常点数据去除,记为s;
14.(2)将工业相机位置转换至激光扫描坐标系下,计算每个工业相机的环向成像范围,记为li,每个工业相机成像范围之间记为pi,相邻工业相机成像重叠距离di,图像中心与工业相机成像中心的距离,记为di,最远成像距离记为d
max
i,最近成像距离记为d
min
i,其中i∈{1,2......n};
15.(3)当起点位置mstr未包含在p1内或终点位置mend未包含在pn内,焦距f1或fn按照dftmm的步长进行减小,直到mstr包含在p1内、mend包含在pn内为止,其中dft一般设置为1mm;确定好工业相机1和工业相机n的焦距时,保持固定不变;
16.(4)对其他工业相机的焦距进行调整,具体步骤如下:
17.(a)依据成像原理,计算di距离下焦距为fci,为了保持一定的设置fi=fci+q,q一般设置为5,计算公示如下:
[0018][0019]
其中,di为工业相机中心到成像范围中心的距离,ui为当前工业相机成像芯片长度,hi为成像的范围。通常,工业相机成像范围分为长度和宽度方向,ui和hi的方向保持一致。
[0020]
(b)若di<dgi,且di<dg,则焦距fi按照0.5mm的步长进行减小,直到di≥dg为止,其中i∈{2,3......n-1};
[0021]
(b)若di>dgi,且di>dg,则焦距fi按照0.5mm的步长进行增加,记焦距调整次数为m,若第m-1次di≥dg,第m次di<dg,则第m-1次的焦距作为当前工业相机调整后的焦距f
ei
;
[0022]
(5)计算每个工业相机的成像精度,记为ai,其中i∈{2,3......n-1},记最大值为amax、最小值记为amin,其对应的工业相机编号为am、an,若amax>2
×
amin,则以am为基准,
焦距f
am
按照0.5mm的步长进行增加,按照步骤(4)依次调整其他工业相机的焦距,直到amax≤2
×
amin为止,若计算无法收敛,设定计算次数为ite,一般设为20;通过自动调整景深调节装置,调整当前图像的清晰度;记录当前焦距为fe,fe∈{f
e1
,f
e2
......f
en
}。
[0023]
自动曝光时间与光圈调整方法包括以下3个步骤:
[0024]
(1)在连续采集过程中,对于第i个工业相机,获取第k次检测图像img{k,i},通过两次灰度计算法,获取当前图像的灰度平均值,其步骤如下:
[0025]
(a)计算图像img{k,i}的灰度均值,记为gg;
[0026]
(b)获取图像img{k,i}中灰度值高于gmin且低于gmax的坐标点及其对应的灰度值,计算其灰度均值,记为ge;其中gmin=gg
×
0.3,gmax=gg
×
2,若gmax>220,则gmax=220;同时设定图像目标灰度均值为gd,一般设为100。
[0027]
(2)利用图像灰度均值ge与曝光时间t、光圈f之间的关系,计算a1和a2的值,如下式所示:
[0028][0029]
获取两组数据ge1、t1、f1和ge2、t2、f2,获取a1和a2的值,其中a1和a2与工业相机本身有关,一次标定存储,后续无需标定即可直接使用。
[0030]
(3)连续采集过程中,依据采集图像的灰度值,不断地调整曝光时间、光圈的值,其调整方法如下:
[0031]
获取当前工业相机的曝光时间为tg、光圈为fg,曝光时间可设定的最大值为视觉检测系统移动2个像素所需要的时间,记为tgmax,光圈可调整的最大值,记为fgmax;
[0032]
a、若ge≥gd,保持光圈不变,依据步骤(2)中的公式计算曝光时间,记为t
ei
;若t
ei
>tgmax,则t
ei
设为tgmax,依据步骤(2)中的公式计算光圈值,记为f
ei
,对工业相机的光圈进行调整;同时记录光源控制器的参数为l
ei
。
[0033]
b、若ge<gd,优先调整光圈,依据步骤(2)中的公式计算光圈值,记为f
ei
,若f
ei
>fgmax,则f
ei
设为fgmax;光圈调整至最大,依然不满足要求时,按照步骤a调整曝光时间,记为t
ei
;若依然不满足要求,可依据系统进行光源功率进行调整,同时记录光源控制器的参数为l
ei
。
[0034]
c、记录当前焦距为te,te∈{t
e1
,t
e2
......t
en
}。
[0035]
将调整好的焦距、曝光时间、光圈,依据高速路段、隧道名称、上下行、检测时间进行记录,便于下次检测时直接进行参数调用与设置。
[0036]
本发明的有益效果是:
[0037]
(1)本发明是一种隧道多断面视觉检测系统,可以减少人工干预,降低对人员的要求,实现不同类型断面全自动切换与检测;
[0038]
(2)本发明基于视觉检测、激光扫描数据,并结合图像亮度信息、亮度、曝光时间之间的关系,快速计算出不同隧道轮廓下的相机调整参数;
[0039]
(3)本发明技术方案将调整的参数与隧道信息进行固定,可确保在下次检测作业时,直接调用参数,无需多次调整。
附图说明
[0040]
图1是本发明实施案例的结构拓扑示意图;
[0041]
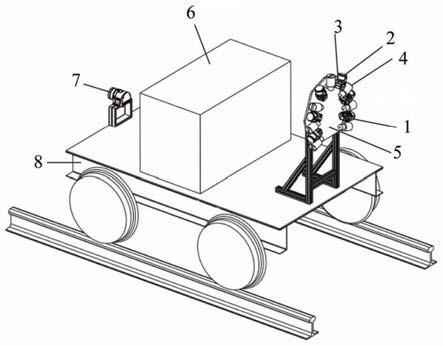
图2是本发明实施案例的自适应断面视觉检测系统设备安装布局示意图;
[0042]
图3是本发明实施案例的自动调节参数的相机与镜头结构示意图。
[0043]
图中:1-工业线阵相机,2-变焦镜头,3-镜头自动调节装置,4-补光装置,5-视觉采集架,6-电气柜,7-激光扫描仪,8-移动平台。
具体实施方式
[0044]
下面结合附图和具体实施例对本发明作详细说明。
[0045]
如图1、图2、图3所示,一种隧道多断面视觉检测系统,由视觉检测装置、移动平台8、和电气柜6组成,所述电气柜6(选用施耐德apc ar3100,亦可根据实际项目进行定制)安装在移动平台8中部,所述视觉检测装置安装在移动平台端部,包括若干工业线阵相机1、若干补光装置4、激光扫描仪7、视觉采集架5,工业线阵相机1、补光装置4间隔安装于视觉采集架5上,用于获取不同轮廓断面的隧道结构表观图像,所述的激光扫描仪7安装在移动平台8另一侧;系统检测速度可达到80km/h以上。所述工业线阵相机1带有变焦镜头2,变焦镜头2设有镜头自动调节装置3。
[0046]
自动成像范围调整系统分别与视觉检测装置和激光扫描仪7信号传输连接,获取视觉检测装置与激光扫描仪获取的隧道轮廓信息,计算在当前轮廓下不同相机的焦距,同时结合图像灰度,自动调整曝光时间与光圈,并将计算数据进行存储、设定预置位,实现不同轮廓的全断面检测快速调整。
[0047]
一种隧道多断面视觉检测系统,工业线阵相机1选择teledyne dalsa线阵相机,最大行频可达280khz,分辨率为8192*4,其像元尺寸为5μm;补光装置选择志强视觉808nm便携式激光光源,最小激光线宽覆盖2mm~12mm的范围,光源角度为90
°
。
[0048]
所述工业线阵相机1安装于视觉采集架5上,与隧道断面平行,通过同步控制单元实现多相机同步拍摄;所述的镜头自动调节装置3用于调节焦距、光圈、曝光时间;所述的补光装置4与所述工业线阵相机1安装于同一平面,交替安装;所述的激光扫描仪7,其扫描范围不低于270
°
,扫描频率不低于50hz,系统误差不大于5mm,其扫描范围内不受遮挡。激光扫描仪7可选择z+f profiler9012,其扫描范围为360
°
,扫描频率50hz、100hz、200hz可选择,测距分辨率0.1mm,激光类型为1级。
[0049]
视觉检测装置安装位置依据标准隧道检测指标要求设置,其覆盖范围起点记为mstr,终点位置记为mend,设定覆盖起点位置的工业线阵相机编号为1,终点位置的工业线阵相机编号为n,工业线阵相机数量记为n,其焦距记为f,f∈{f1,f2......fn},并调整图像清晰成像;图像中心与相机成像中心距离记为dg,dg∈{dg1,dg2......dgn},相邻工业线阵相机之间的重叠距离记为dg,一般dg设为30mm;选用变焦镜头的焦距范围为fminmm-fmaxmm;每个工业线阵相机的光圈参数记为f,f∈{f1,f2......fn};每个工业线阵相机在第k次,获取的图像记为img,img∈{img{k,1},img{k,2}......img{k,n}}。
[0050]
图2所示的系统中,工业线阵相机的数量为6,变焦镜头的焦距范围为16mm~96mm,以直径为5.2米的地铁盾构隧道为例。在实施过程中,为了确保成像镜头,可为每个工业线阵相机配备可伸缩结构,满足最大可能提高精度的要求。图像采集精度设定为0.288mm的前
提下,不同工业线阵相机的焦距为55mm、55mm、55mm、55mm、55mm、55mm,图像中心与相机成像中心距离分别为2257.8mm、2257.8mm、2257.8mm、2257.8mm、2257.8mm、2257.8mm,光圈参数为f5.6、f5.6、f5.6、f5.6、f5.6、f5.6,相邻工业线阵相机之间的重叠区域依次为312mm、312mm、402mm、312mm、312mm。
[0051]
一种隧道多断面视觉检测系统的自适应调整方法,包括自动焦距调整方法和自动曝光时间与光圈调整方法,其中自动焦距调整方法与激光扫描数据进行结合,调整焦距确保能覆盖检测的隧道断面;自动曝光时间与光圈调整方法与拍摄图像灰度及清晰度进行结合,调整曝光时间与光圈,确保成像效果最佳。
[0052]
自动焦距调整方法包括以下5个步骤:
[0053]
(1)获取当前隧道轮廓激光扫描数据,并将异常点数据去除,记为s;
[0054]
(2)将相机位置转换至激光扫描坐标系下,计算每个工业线阵相机的环向成像范围,记为li,每个工业线阵相机成像范围之间记为pi,相邻工业线阵相机成像重叠距离di,图像中心与工业线阵相机成像中心的距离,记为di,最远成像距离记为d
max
i,最近成像距离记为d
min
i,其中i∈{1,2......n};
[0055]
(3)当起点位置mstr未包含在p1内或终点位置mend未包含在pn内,焦距f1或fn按照dftmm的步长进行减小,直到mstr包含在p1内、mend包含在pn内为止,其中dft一般设置为1mm;确定好工业线阵相机1和工业线阵相机n的焦距时,保持固定不变;
[0056]
(4)对其他工业线阵相机的焦距进行调整,具体步骤如下:
[0057]
(a)依据成像原理,计算di距离下焦距为fci,为了保持一定的设置fi=fci+q,q一般设置为5,计算公示如下:
[0058][0059]
其中,di为工业线阵相机中心到成像范围中心的距离,ui为当前工业线阵相机成像芯片长度,hi为成像的范围。通常,工业线阵相机成像范围分为长度和宽度方向,ui和hi的方向保持一致。
[0060]
(b)若di<dgi,且di<dg,则焦距fi按照0.5mm的步长进行减小,直到di≥dg为止,其中i∈{2,3......n-1};
[0061]
(b)若di>dgi,且di>dg,则焦距fi按照0.5mm的步长进行增加,记焦距调整次数为m,若第m-1次di≥dg,第m次di<dg,则第m-1次的焦距作为当前工业线阵相机调整后的焦距f
ei
;
[0062]
(5)计算每个工业线阵相机的成像精度,记为ai,其中i∈{2,3......n-1},记最大值为amax、最小值记为amin,其对应的工业线阵相机编号为am、an,若amax>2
×
amin,则以am为基准,焦距f
am
按照0.5mm的步长进行增加,按照步骤(4)依次调整其他工业线阵相机的焦距,直到amax≤2
×
amin为止,若计算无法收敛,设定计算次数为ite,一般设为20;通过自动调整景深调节装置,调整当前图像的清晰度;记录当前焦距为fe,fe∈{f
e1
,f
e2
......f
en
}。
[0063]
当隧道轮廓变更为马蹄形隧道后,其成像精度分别为0.308mm、0.309mm、0.309mm、0.309mm、0.308mm、0.308mm,其焦距为58mm、55mm、56mm、56mm、55mm、58mm,图像中心与工业线阵相机成像中心距离分别为2559.1mm、2429.7mm、2469.4mm、2469.5mm、2429.7mm、2559.1mm,光圈参数为f5.6、f5.6、f2.8、f2.8、f5.6、f5.6,相邻工业线阵相机之间的重叠区
域依次为64mm、336mm、421mm、336mm、64mm。
[0064]
自动曝光时间与光圈调整方法包括以下3个步骤:
[0065]
(1)在连续采集过程中,对于第i个工业线阵相机,获取第k次检测图像img{k,i},通过两次灰度计算法,获取当前图像的灰度平均值,其步骤如下:
[0066]
(a)计算图像img{k,i}的灰度均值,记为gg;
[0067]
(b)获取图像img{k,i}中灰度值高于gmin且低于gmax的坐标点及其对应的灰度值,计算其灰度均值,记为ge;其中gmin=gg
×
0.3,gmax=gg
×
2,若gmax>220,则gmax=220;同时设定图像目标灰度均值为gd,一般设为100。
[0068]
(2)利用图像灰度均值ge与曝光时间t、光圈f之间的关系,计算a1和a2的值,如下式所示:
[0069][0070]
获取两组数据ge1、t1、f1和ge2、t2、f2,获取a1和a2的值,其中a1和a2与工业线阵相机本身有关,一次标定存储,后续无需标定即可直接使用。
[0071]
(3)连续采集过程中,依据采集图像的灰度值,不断地调整曝光时间、光圈的值,其调整方法如下:
[0072]
获取当前工业线阵相机的曝光时间为tg、光圈为fg,曝光时间可设定的最大值为视觉检测系统移动2个像素所需要的时间,记为tgmax,光圈可调整的最大值,记为fgmax;
[0073]
a、若ge≥gd,保持光圈不变,依据步骤(2)中的公式计算曝光时间,记为t
ei
;若t
ei
>tgmax,则t
ei
设为tgmax,依据步骤(2)中的公式计算光圈值,记为f
ei
,对工业线阵相机的光圈进行调整;同时记录光源控制器的参数为l
ei
。
[0074]
b、若ge<gd,优先调整光圈,依据步骤(2)中的公式计算光圈值,记为f
ei
,若f
ei
>fgmax,则f
ei
设为fgmax;光圈调整至最大,依然不满足要求时,按照步骤a调整曝光时间,记为t
ei
;若依然不满足要求,可依据系统进行光源功率进行调整,同时记录光源控制器的参数为l
ei
。
[0075]
c、记录当前焦距为te,te∈{t
e1
,t
e2
......t
en
}。
[0076]
将调整好的焦距、曝光时间、光圈,依据高速路段、隧道名称、上下行、检测时间进行记录,便于下次检测时直接进行参数调用与设置。
[0077]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由本发明的权利要求书所要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1