光栅投影系统及光栅相移高度测量自动校正补偿方法与流程
1.本发明涉及一种spi设备3d重建高度检测技术领域,具体为一种光栅投影系统及光栅相移高度测量自动校正补偿方法。
背景技术:
2.光栅相移高度测量是通过光机向被测物投影一组相位移动的光栅条纹图,相机采集获取其投影条纹图,可实现被测对象的三维重建,该非接触式的3d检测方法以速度快、精度高、受环境光影响小等优点在各个领域获得广泛运用。其三维重建过程可分为:光栅相移的产生的投影、相位展开和相位差计算、相位——高度映射。
3.在实际运用中,由于环境的干扰、硬件的影响光栅条纹正弦性和高度精度受到一定影响,导致实际测得的高度重建结果与实际存在偏差。在现有的提高光栅相移测量精度的研究中,基本均是针对相位精度研究,减小或者消除gamma 效应(伽马效应)影响、提升和改善其投影条纹正弦性;相位精度是影响三维高度重建效果的因素,其主要表现在高度重建视觉效果上的优良,对高度值的计算影响不大;
4.目前各项研究对高度研究测试结果均是计算结果之间的比对,未涉及测量结果与实际物理高度结果之间的比对;检测研究对象为单一高度对象,未涉及多个高度对象之间的高度结果比对研究;检测研究对象位于fov内某一位置,未涉及fov内不同位置上的高度结果比对研究;基本均是针对相位精度的研究,未研究实测高度结果与实际高度之间的映射关系;针对相位精度提升的研究和测试,其精度提升后的高度结果误差仍较大,均在10um以上;基于此,本发明基于对fov内不同位置上、不同高度对象、实测高度值与实际高度之间的关系映射研究,提出了一种光栅相移高度测量自动校正补偿方法。
技术实现要素:
5.为克服上述缺点,本发明的目的在于提供一种根据光学系统特征,自动校正补偿整个fov内任意高度对象在任意位置的高度测量结果,高度测量误差小于1微米或更低,与实际物理测量高度相符的光栅投影系统及光栅相移高度测量自动校正补偿方法。
6.为了达到以上目的,本发明采用的技术方案是:一种光栅投影系统,采集光栅投影图像信息,包括已完成投影标定的光机dlp、已完成基本标定的相机、工业计算机、已完成基本标定的光栅投影系统的平台、置于平台的轨道上的四点标定块;所述光机dlp位于四点标定块的斜上方的斜上方位置,并与垂直方向成27
°‑
33
°
的倾斜角度,所述光机dlp朝向被测标定块;所述的四点标定块为具有平准完好基面,且含有四个高度值已知、长宽一致、不同高度的凸起平面;
7.所述相机位于被测的四点标定块的正上方,所述相机垂直朝向被测标定块;所述平台根据相机像素和镜头的分辨率特征获取校正补偿参数过程中的测量点位信息,根据枝切法获取测量点位上四点标定块的相位差结果和高度测量结果,结合四点标定块的4个实际高度获取实测高度值与实际高度之间的映射关系,获取4组高度校正补偿参数;根据所述
平台可检测高度范围,将校正补偿参数按照1um高度精度拓展至整个高度可检测范围,获取本机台完整的光栅相移高度测量校正补偿参数;在获取光栅相移完整的高度校正补偿参数后,根据被测对象的位置和相位差结果按照lut查表法获取对应的校正补偿参数,根据高度校正方程获取高度校正补偿结果。
8.为了达到以上目的,本发明还提供了一种光栅相移高度测量自动校正补偿方法,采用了上述的光栅投影系统,利用相机光栅相移获取的投影条纹图像,其具体步骤包括:
9.步骤一,平台根据相机和镜头参数获取校正补偿参数过程中的测量点位信息;
10.步骤二,根据枝切法获取测量点位上四点标定块的相位差结果和高度测量结果;
11.步骤三,结合四点标定块的4个实际高度和在distimage(可视范围fov内各位置与零相位距离图像,简称零相位距离图)上的像素值,获取实测高度值与实际高度之间的映射关系,获取4组高度校正补偿参数;
12.步骤四,根据平台可检测高度范围,将校正补偿参数按照1um高度精度拓展至整个高度可检测范围,获取本机台完整的光栅相移高度测量校正补偿参数;
13.步骤五,光栅相移高度测量自动校正补偿,是在获取高度校正补偿参数后,根据被测对象的位置和相位差结果按照lut查表法获取对应的校正补偿参数,根据高度校正方程获取高度校正补偿结果。
14.优选地,所述的四点标定块4个高度完全已知,所述的实测相位差是根据光机投影、相机采集的投影条纹图根据枝切法计算得到,所述的实测高度是根据相位差——高度映射关系获取,所述的distimg是表征fov(可视范围)内各点与光机投影零相位条纹之间距离的图像。
15.优选地,基于标定块的实际高度、实测高度的数值特征和distimg在各测量点位上的数值规律,完成实测高度与实际高度之间的关系映射,得到校正补偿参数。
16.优选地,所述校正补偿参数具体为:通过分别线性拟合四点标定块4个高度对象实际高度、在各测量点位上的实测高度结果与distimg在各点位上的数值distvalue(与零相位距离值)关系,得到四组拟合参数(a,b,c),即高度校正补偿参数,标定块的四点凸台实际高度为h:
17.h=a*h
test-b*distvalue+c
18.其中,h
test
为实测高度,h是校正补偿高度。
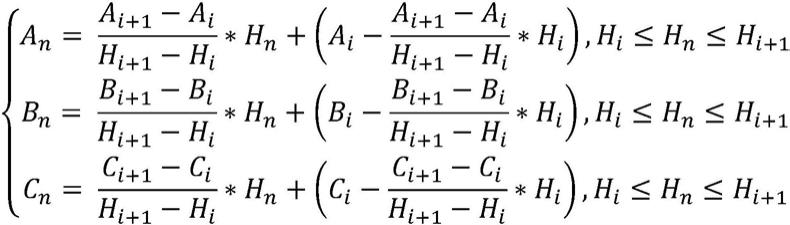
19.优选地,根据标定块4个实际高度(h1、h2、h3、h4)和四组高度校正补偿参数间特征,将高度校正补偿结果拓展至整个高度检测范围,最终得到检测高度范围内间距为1um的所有高度校正补偿参数,具体为:
20.hn=h
min
+n,n=0,1,2,3
……
(h
max-h
min
)
21.22.其中i=1,2,3,4分别对应四点标定块四个高度,
23.hn为根据平台可检测高度范围按高度间距1um进行拓展的高度值。
24.优选地,根据被测对象的位置和实测高度结果按照lut查表法获取对应的校正补偿参数,根据高度校正方程获取高度校正补偿结果,具体为:根据四步相移法由投影条纹图获取包裹相位图,运用枝切法对包裹相位进行相位展开,获取被测对象相位差结果,根据相位-高度映射关系得到实测高度结果,依据被测对象位置信息(x,y)找到与其最接近的测量点位,通过查表法lut查找该点位上与其实测高度结果最接近的高度值所对应的高度校正补偿参数,即最优高度校正补偿参数(a,b,c),获取distimage上被测对象所在位置的灰度值distvalue,根据高度校正方程h=a*h
test-b*distvalue+c,计算可得最终高度校正补偿值。
25.优选地,所述的根据四步相移获取的包裹相位图运用枝切法进行相位展开,获得测量点位上四点标定块的相位差结果,是指光机投影、相机采集的四张条纹图,根据四步相移法获取包裹相位图利用被测物与其四周基面计算出相位差,四步相移法公式如下:
[0026][0027][0028][0029][0030]
所述的相位——高度映射关系,是指根据光机系统的空间特征和图像信息,求出高度和相位差之间的映射关系,如下:
[0031][0032]
其中,为相位差,p0为投影条纹宽度,θ为光机与垂直方向的夹角,l为光机与被测基面之间的垂直距离,dist为图像上各点与光机投影条纹零相位条纹的距离,θ,l,dist为光机系统标定结果;
[0033]
所述的结合四点标定块的4个实际高度,获取实测高度与实际高度之间的映射关系,获取4组高度校正补偿参数,是指根据四张条纹图根据四步相移法和枝切法,获取标定块上4个高度对象在所有测量点位上的相位差结果phase,基于相位——高度映射关系获取实测高度值,基于标定块的实际高度、实测高度与distimg上对应位置的distvalue,线性拟合获取参数ai,bi,ci,即为4 组高度校正补偿参数,其关系满足如下公式:
[0034]hi
=ai*h
test-bi*distvalue+ci,(i=1,2,3,4)。
[0035]
本发明光栅投影系统及光栅相移高度测量自动校正补偿方法的有益效果是:
[0036]
其一,检测校正对象是具有四个不同高度对象的四点标定块,非单一高度对象,在光栅相移高度检测研究中,实际检测对象从单个拓展至四个,解决了测量研究对象为单一的技术问题。
[0037]
其二,对标定块四点高度对象的实测高度与实际高度之间的映射关系展开研究,实现基于相位差获得的实测高度与实际高度之间关系映射,解决目前基本均是研究相位精度,未涉及相位和高度映射关系准确性研究以及基本未涉及实测高度与被测物实际高度之间的映射关系研究的技术问题。
[0038]
其三,被测对象(四点标定块)置于fov内不同位置上进行相位差检测、高度检测、高度校正;相位—高度映射关系从单一测量位置拓展至覆盖整个fov 的上百个测量位置,解决了几乎所有的相位精度研究均基于fov内单点位置,检测研究位置单一,未涉及整个fov内高度精度校正补偿的技术问题。
[0039]
其四,根据标定块的实际高度和不同位置上的高度检测结果,自动生成校正补偿参数,校正补偿参数根据平台自动生成,克服平台间差异性,解决了相位精度提升仅限于单个机台,未考虑测量机台间的差异性的技术问题;校正参数源于被测对象的实测结果与真实高度的映射关系,解决了基本未涉及实测高度与被测物实际高度之间的映射关系研究的技术问题。
[0040]
其五,四点高度校正补偿参数根据机台高度测量范围,生成相应的多组校正补偿参数,且高度精度为1um,提升检测精度,确保不同高度校正补偿后误差在1um以内,解决了相位精度提升后的高度误差较大,均在10um以上的技术问题。
[0041]
综上,本发明光栅投影系统及光栅相移高度测量自动校正补偿方法的有益效果是:本技术基于光栅相移测量高度技术研究测试了多个高度对象、多个对象在fov内上百个测量位置上实测高度与实际高度之间的关系、自动生成校正补偿参数、克服了机台间的差异性、高度测量误差控制在1um以内,实现了被测对象实测高度与实际高度之间的校正补偿;简单快捷获取实测高度值与实际高度之间的校正补偿参数,可实现fov内任意高度对象在任意位置上的高度校正补偿,大大提高了基于光栅相移高度测量的精度,且大大减小了因机台间差异导致的高度结果差异。
附图说明
[0042]
图1是本发明的一种光栅相移高度测量自动校正补偿方法的光学系统平台示意图;
[0043]
图2是本发明的光栅相移高度测量自动校正补偿方法的流程图;
[0044]
图3是本发明的所涉及的标定块测量点位在单个fov内的分布示意图;
[0045]
图4是本发明的光机系统标定结果之一distimg图像;
[0046]
图5是本发明的四点标定块在所有测量点位置上的高度值;
[0047]
图6是本发明的四点标定块在所有测量点位置上的高度校正补偿值。
具体实施方式
[0048]
下面对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征能更易于被
本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
[0049]
本实施例中的一种光栅投影系统,采集光栅投影图像信息,包括已完成投影标定的光机dlp、已完成基本标定的相机、工业计算机、已完成基本标定的光栅投影系统的平台、置于平台的轨道上的四点标定块,本实施例中的平台轨道为平行轨道,平行轨道处于完全水平状态,其上放置被测物:四点标定块,相机camera的z轴与被测物平面法向量方向平行;高度检测过程中被测物置于轨道上静止不动,光学系统做相对运动,光机dlp向被测物投射四张条纹图,相机camera采集图像,工业计算机进行数据处理获得被测物高度信息。工业计算机实现整个系统的控制和信息处理;所述光机dlp位于四点标定块的斜上方位置,并与垂直方向成30
°±3°
且朝向被测标定块;所述相机位于被测的四点标定块的正上方,所述相机垂直朝向被测标定块;所述的四点标定块为具有平准完好基面,且含有四个高度值已知、长宽一致、不同高度的凸起平面;所述平台根据相机像素和镜头的分辨率特征获取校正补偿参数过程中的测量点位信息,根据枝切法获取测量点位上四点标定块的相位差结果和高度测量结果,结合四点标定块的4个实际高度获取实测高度值与实际高度之间的映射关系,获取4 组高度校正补偿参数;根据所述平台可检测高度范围,将校正补偿参数按照1um 高度精度拓展至整个高度可检测范围,获取本机台完整的光栅相移高度测量校正补偿参数;在获取光栅相移完整的高度校正补偿参数后,根据被测对象的位置和相位差结果按照lut查表法获取对应的校正补偿参数,根据高度校正方程获取高度校正补偿结果。
[0050]
参考图2,一种光栅相移高度测量自动校正补偿方法,其步骤包括:
[0051]
步骤一,平台根据相机和镜头参数获取校正补偿参数过程中的测量点位信息。更为具体的是,获取单个fov内高度测量点位信息:在相机、光机已完成基本标定基础上,根据相机像素、相机镜头分辨率,结合标定块四点凸起平面的长宽信息,可确定该fov内测量点位的位置信息(col,row),光学系统移动步长和步数。fov内测量点位的位置信息(col,row)如图3所示,光学系统主要包括光机dlp、相机camera和光源。
[0052]
步骤二,根据枝切法获取测量点位上四点标定块的相位差结果和高度测量结果。更为具体的是,获取distimage图像及其在各测量点位上的数据信息:根据光机系统标定结果,计算可得表示fov内各个像素点位置与光机投影条纹零相位条纹的距离,即图像distimage,如图4所示;根据测量点位置信息(col, row)获取distimage图像上所有测量点位的灰度值数据distval。
[0053]
步骤三,结合四点标定块的4个实际高度和在distimage(可视范围fov内各位置与零相位距离图像,简称零相位距离图)上的像素值,获取实测高度值与实际高度之间的映射关系,获取4组高度校正补偿参数。所述的四点标定块4 个高度完全已知,所述的实测相位差是根据光机(1)投影、相机(2)采集的投影条纹图根据枝切法计算得到,所述的实测高度是根据相位差——高度映射关系获取,所述的distimg是表征fov内各点与光机投影零相位条纹之间距离的图像。更为具体的是,获取四点标定块在所有测试点位上的高度测量数据:四点标定块置于平行轨道上静止不动,根据步骤(1)中获得的光学系统的移动步长和步数,完成四点标定块在所有测量点位上的条纹图投影、相机采集其投影图像;根据四步相移法获取四点标定块在所有测量点位上的包裹相位,根据枝切法进行相位展开,即包裹相位展开为连续相位;计算被测对象相位与周围相位的相位差结果,获取四点标定块在所有测量点位上的相位差结果,根据相位——高度映射关系,获取四点标定块在所有测量点位上的
高度值结果。
[0054]
其中,四步相移原理:
[0055][0056][0057]
其中ib(x,y)为包裹相位,i1、i2、i3、i4为四张条纹图,根据四步相移法可得:
[0058][0059][0060]
枝切法完成包裹相位到连续相位的展开运算,基本步骤包括:
①
识别包裹相位图上残差点;
②
生成对偶极子枝切线和其他枝切线;
③
绕过枝切线进行积分,完成相位展开;
④
对枝切线上的像素点进行相位展开。
[0061]
根据四点标定块的凸台分割区域,计算凸台相位与其四周相位的差值,即获得四点标定块的相位差结果,依次计算四点标定块在所有测量点位上的相位差结果。
[0062]
根据光机系统标定结果参数,可得相位——高度映射关系,结合相位差结果可获得四点标定块在所有测试点位上的高度值,如图5所示,其中相位——高度映射关系:
[0063][0064]
其中,为相位差,p0为投影条纹宽度,θ为光机z轴与垂直方向的夹角,l为光机与测量平面的垂直距离,dist为被测对象与零相位的距离。
[0065]
将四点标定块4个已知的高度对象在所有测量点位上的高度结果,与 distimage在所有测量点位上的像素值,以实际高度值为目标进行线性拟合,获取4组校正补偿参数(ai,bi,ci,i=1,2,3,4),高度测量值(h
test
)与实际高度值 (h
real
)之间关系:
[0066]hreal
=a*h
test-b*distvalue+c;
[0067]
步骤四,根据平台可检测高度范围,将校正补偿参数按照1um高度精度拓展至整个高度可检测范围,获取本机台完整的光栅相移高度测量校正补偿参数。更为具体的,结合四点标定块的实际高度值与其高度校正补偿参数之间的数量关系,将高度校正补偿参数按照1um高度精度拓展至整个高度检测范围,即可获得完整的高度校正补偿参数,高度校正补偿参数拓展方法如下:
[0068]hn
=h
min
+n,n=0,1,2,3
……
(h
max-h
min
)
[0069][0070]
其中,i=1,2,3,4分别对应四点标定块四个高度,
[0071]hn
为根据平台可检测高度范围按高度间距1um进行拓展的高度值。
[0072]
步骤五,光栅相移高度测量自动校正补偿,是在获取高度校正补偿参数后,根据被测对象的位置和相位差结果按照lut查表法获取对应的校正补偿参数,根据高度校正方程获取高度校正补偿结果。更为具体的是,对位于fov内任意位置上的任意高度对象进行高度校正补偿:获取被测对象的四张条纹图,计算求取包裹相位、运用枝切法进行相位展开、求取相位差、获得高度测量值h
test
,匹配查找与该测量对象最接近的标定块测量点位。
[0073]
查找该测量点位上高度测量值与当前被测对象高度测量值h
test
最接近的高度所对应的高度校正补偿参数(a,b,c),根据高度校正补偿公式获得高度校正补偿值,高度校正补偿公式如下:
[0074]hcorrect
=a*h
test-b*distvalue+c
[0075]
其中,h
correct
为校正补偿高度值。
[0076]
参考图6,一种光栅相移高度测量自动校正补偿方法运用实例,完成四点标定块的4个凸起平面的高度校正补偿,得到高度校正补偿结果。
[0077]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1