基于MEMS传感器的振动监测方法及装置与流程
基于mems传感器的振动监测方法及装置
技术领域
1.本发明涉及振动监测技术领域,具体来说涉及一种基于mems传感器的振动监测方法及装置。
背景技术:
2.各种包括旋转部件的机械设备因设计制造、安装调试、运行维修中的一些缺陷和环境影响,在运行时均会产生机械振动,而振动的存在必然引起结构损伤及材料疲劳,并在相当短的时间迅速发展扩大,进而引起设备疲劳破坏并可能导致重大事故。因此通过监测机械设备的振动状态,对机械设备健康进行预测并对潜在的故障进行早期预警,以避免机械设备突发故障而造成重大损失,是智慧工业的关键环节。
3.机械设备健康预测主要的技术方法是通过监测设备运行中的振动情况,进而分析设备是否存在失衡、失准或其他可能导致设备故障的机械异常。传统的振动监测技术是基于压电加速度传感器,但该技术存在振动响应慢、稳定性较低、成本高,并且由于监测装置体积大,不便于将其安装在机械设备的关键监测点位,造成检测准确度较低。
技术实现要素:
4.本发明旨在提出一种基于mems传感器的振动监测方法及装置,以提高振动监测的响应速度、稳定性和准确性。
5.本发明解决上述技术问题所采用的技术方案是:
6.第一方面,提供一种基于mems传感器的振动监测方法,包括以下步骤:
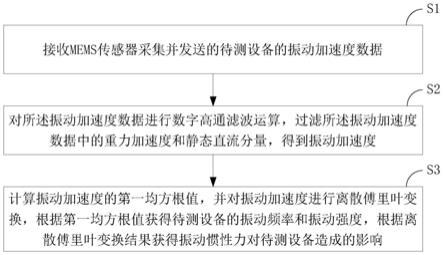
7.步骤1、接收mems传感器采集并发送的待测设备的振动加速度数据;
8.步骤2、对所述振动加速度数据进行数字高通滤波运算,过滤所述振动加速度数据中的重力加速度和静态直流分量,得到振动加速度;
9.步骤3、计算所述振动加速度的第一均方根值,并对所述振动加速度进行离散傅里叶变换,根据所述第一均方根值获得待测设备的振动频率和振动强度,根据所述离散傅里叶变换结果获得振动惯性力对待测设备造成的影响。
10.作为进一步优化,该方法还包括:
11.步骤4、对所述振动加速度进行数字积分运算,得到对应的振动速度数据;
12.步骤5、对所述振动速度数据进行数字高通滤波运算,过滤所述振动速度数据的直流分量和速度线性漂移,得到振动速度;
13.步骤6、计算所述振动速度的第二均方根值,并根据所述第二均方根值获得待测设备的载荷循环速度和机械形变情况。
14.作为进一步优化,该方法还包括:
15.步骤7、对所述振动速度进行数字积分运算,得到对应的振动位移数据;
16.步骤8、对所述振动位移数据进行数字高通滤波运算,过滤所述振动位移数据的直流分量和速度线性漂移,得到振动位移;
17.步骤9、计算所述振动位移的第三均方根值,并根据所述第三均方根值获得待测设备的旋转部件的位置精度和形变引起的失准数据和失衡数据。
18.作为进一步优化,该方法还包括:
19.分别将所述待测设备的振动频率、振动强度、振动惯性力对待测设备造成的影响、载荷循环速度、机械形变情况、旋转部件的位置精度以及形变引起的失准数据和失衡数据与正常状态下的对应预设阈值进行比较,并根据比较结果确定待测设备的后续运行状态。
20.作为进一步优化,所述待测设备的后续运行状态至少包括:正常运行状态、需监护运行的预警状态、需停机检修状态和需停机状态。
21.作为进一步优化,该方法还包括:
22.将所述待测设备的振动频率、振动强度、振动惯性力对待测设备造成的影响、载荷循环速度、机械形变情况、旋转部件的位置精度、形变引起的失准数据和失衡数据以及确定出的待测设备的后续运行状态发送至后台服务器。
23.第二方面,提供一种基于mems传感器的振动监测装置,包括:
24.mems传感器,用于采集并发送待测设备的振动加速度数据;
25.微处理器,用于对所述振动加速度数据进行数字高通滤波运算,过滤所述振动加速度数据中的重力加速度和静态直流分量,得到振动加速度;计算所述振动加速度的第一均方根值,并对所述振动加速度进行离散傅里叶变换,根据所述第一均方根值获得待测设备的振动频率和振动强度,根据所述离散傅里叶变换结果获得振动惯性力对待测设备造成的影响。
26.作为进一步优化,所述微处理器,还用于对所述振动加速度进行数字积分运算,得到对应的振动速度数据;对所述振动速度数据进行数字高通滤波运算,过滤所述振动速度数据的直流分量和速度线性漂移,得到振动速度;以及计算所述振动速度的第二均方根值,并根据所述第二均方根值获得待测设备的载荷循环速度和机械形变情况。
27.作为进一步优化,所述微处理器,还用于对所述振动速度进行数字积分运算,得到对应的振动位移数据;对所述振动位移数据进行数字高通滤波运算,过滤所述振动位移数据的直流分量和速度线性漂移,得到振动位移;以及计算所述振动位移的第三均方根值,并根据所述第三均方根值获得待测设备的旋转部件的位置精度和形变引起的失准数据和失衡数据。
28.作为进一步优化,所述微处理器,还用于分别将所述待测设备的振动频率、振动强度、振动惯性力对待测设备造成的影响、载荷循环速度、机械形变情况、旋转部件的位置精度以及形变引起的失准数据和失衡数据与正常状态下的对应预设阈值进行比较,并根据比较结果确定待测设备的后续运行状态。
29.本发明的有益效果是:本发明所述的基于mems传感器的振动监测方法及装置,因mems传感器具有体积小、功耗低、响应快、稳定性高、多轴向检测的特点,同时本发明根据检测到的振动加速度数据,计算分析了能表征设备机械疲劳损伤的加速度、速度、位移以及频谱等多维度的特征参数,以作为设备运行健康状态的预测诊断标准,不仅易于嵌入设备的任何待测部位和长时间实时监测,而且能对设备因旋转部件位置偏移、机械形变、惯性力、超载荷等多种因素导致的健康异常进行早期预测预警,从而避免设备突发故障而造成重大损失。本发明具有振动恢复快、频率响应宽、稳定性高及低功耗、小体积、低成本等优点,易
于实施,具有很好的实际应用价值。
附图说明
30.图1为本发明实施例所述的基于mems传感器的振动监测装置的结构示意图;
31.图2为本发明实施例所述的基于mems传感器的振动监测方法的流程示意图。
具体实施方式
32.下面将结合附图对本发明的实施方式进行详细描述。
33.本发明提供的基于mems传感器的振动监测方法及装置,主要方案包括:接收mems传感器采集并发送的待测设备的振动加速度数据;对所述振动加速度数据进行数字高通滤波运算,过滤所述振动加速度数据中的重力加速度和静态直流分量,得到振动加速度;计算所述振动加速度的第一均方根值,并对所述振动加速度进行离散傅里叶变换,根据所述第一均方根值获得待测设备的振动频率和振动强度,根据所述离散傅里叶变换结果获得振动惯性力对待测设备造成的影响。
34.mems即微电子机械系统(microelectro mechanical systems),mems传感器是采用微电子和微机械加工技术制造出来的新型传感器。与传统的传感器相比,它具有体积小、重量轻、成本低、功耗低、可靠性高、适于批量化生产、易于集成和实现智能化的特点。本发明基于mems传感器的振动监测装置对待测设备进行实时振动监测,具体流程如下:首先将mems传感器固定在待测设备的振动监测点位,在获取mems传感器采集的待测设备的振动加速度数据之后,对振动加速度数据进行数字高通滤波运算,以过滤所述振动加速度数据中的重力加速度和静态直流分量得到振动加速度,然后再根据振动速度对应的第一均方根值以及离散傅里叶变换结果获得待测设备的振动频率、振动强度以及振动惯性力对待测设备造成的影响。
35.实施例
36.本发明实施例所述的基于mems传感器的振动监测装置,如图1所示,包括:锂离子电池1、电源管理模块2、加速度传感器3、微处理器4和通讯模块5。锂离子电池1与电源管理模块2的输入端相连,为监测装置提供电源,同时电源管理模块2对锂离子电池1进行充放电管理;电源管理模块2的输出端与加速度传感器3、微处理器4、通讯模块5的电源输入端相连,锂离子电池的电压经电源管理模块转换为所需要的供电电压输出;加速度传感器3用于检测设备的机械振动,输出加速度数据至微处理器4;微处理器4对加速度数据进行运算分析并对设备的运行健康状态进行预测诊断,分析诊断的结果输出至通讯模块5;通讯模块接收上位机或远程监控中心的指令启动或停止振动监测装置,并将监测分析的数据发送给上位机或远程监控中心。
37.本实施例中,所述加速度传感器为mems加速度传感器,且为三轴传感器,可以同时监测xyz三个方向的振动加速度数据,比如意法半导体st公司的iis2dh。
38.所述微处理器优选支持浮点运算的32位mcu芯片,比如基于arm cortex-m4内核的stm32微处理器。
39.所述通讯模块可以是有线或无线通讯技术中的任一种,比如有线的rs485,无线的蓝牙或wifi或4g通讯模块等。
40.所述振动监测装置通过外壳上的螺钉固定在待测设备的振动监测点位,也可以在振动监测装置的外壳上嵌入永久磁铁,使振动监测装置吸附在待测设备的振动监测点位。
41.基于上述振动监测装置,本实施例所述的基于mems传感器的振动监测方法,由于xyz三个方向的加速度数据的运算处理和预测诊断的方法相同,为简化阐述,以下不再区分xyz方向。
42.本实施例将所述振动监测装置固定在待测设备振动监测点位后,可以实时对待测设备的振动情况进行监测,也可以在接收到后台服务器的指令启动监测时,mems加速度传感器采集振动加速度数据并输入微处理器,微处理器对加速度数据进行运算处理和预测诊断,如图2所示,具体包括以下步骤:
43.步骤1、接收mems传感器采集并发送的待测设备的振动加速度数据;
44.步骤2、对所述振动加速度数据进行数字高通滤波运算,过滤所述振动加速度数据中的重力加速度和静态直流分量,得到振动加速度;
45.步骤3、计算所述振动加速度的第一均方根值,并对所述振动加速度进行离散傅里叶变换,根据所述第一均方根值获得待测设备的振动频率和振动强度,根据所述离散傅里叶变换结果获得振动惯性力对待测设备造成的影响;
46.步骤4、对所述振动加速度进行数字积分运算,得到对应的振动速度数据;
47.步骤5、对所述振动速度数据进行数字高通滤波运算,过滤所述振动速度数据的直流分量和速度线性漂移,得到振动速度;
48.步骤6、计算所述振动速度的第二均方根值,并根据所述第二均方根值获得待测设备的载荷循环速度和机械形变情况;
49.步骤7、对所述振动速度进行数字积分运算,得到对应的振动位移数据;
50.步骤8、对所述振动位移数据进行数字高通滤波运算,过滤所述振动位移数据的直流分量和速度线性漂移,得到振动位移;
51.步骤9、计算所述振动位移的第三均方根值,并根据所述第三均方根值获得待测设备的旋转部件的位置精度和形变引起的失准数据和失衡数据。
52.步骤10、分别将所述待测设备的振动频率、振动强度、振动惯性力对待测设备造成的影响、载荷循环速度、机械形变情况、旋转部件的位置精度以及形变引起的失准数据和失衡数据与正常状态下的对应预设阈值进行比较,,根据监测计算值是否超出预设健康阈值及超出的比例判定待测设备的后续运行状态,以便于后续对待测设备的操作,例如正常状态、需监护运行的预警状态、需停机检修状态、需停机禁止运行的状态等。
53.步骤11、将振动监测参数及健康预测诊断结果上传至后台服务器,等待下一次监测指令。
54.特别地,作为振动预测诊断判定标准的预设健康阈值,可以来自设备厂商,也可以根据对设备长期使用、观察、维修与测试后的智能学习总结。
55.本领域的普通技术人员应理解,本实施例中所涉及的数字高通滤波运算、数字积分运算、均方根计算、离散傅里叶变换均是基础的数学计算方法,在此不再赘述。
56.综上所述,本实施例所述的基于mems加速度传感器的设备振动监测方法及装置,因mems传感器具有体积小、功耗低、响应快、稳定性高、多轴向检测的特点,同时本实施例根据检测到的振动加速度数据,计算分析了能表征设备机械疲劳损伤的加速度、速度、位移以
及频谱等多维度的特征参数,以作为设备运行健康状态的预测诊断标准,因此不仅所述装置易于嵌入设备的任何待测部位和长时间实时监测,而且能对设备因旋转部件位置偏移、机械形变、惯性力、超载荷等多种因素导致的健康异常进行早期预测预警,从而避免设备突发故障而造成重大损失,本实施例的技术方案,在智慧工业的设备运维中具有很好的实际应用推广价值。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1