一种透镜面形测量装置及方法与流程
1.本发明涉及光学领域,具体涉及一种透镜测量装置及方法。
背景技术:
2.相位测量偏折术是一种基于结构光编码、相移技术和波前重建算法的非接触式镜面面形检测技术。对于透镜等透明元件,其不仅存在折射,而且存在上下表面的镜面反射。其上下表面同时存在的光的反射,影响了相位测量偏折术中条纹相位的准确提取。常规相位测量偏折术测量透镜面形常采用粗糙化或黑化元件下表面的方法对待测透明元件进行预处理,使其只有一个表面存在光的反射。然而该测量方法效率低,不便应用于大批量检测。
3.xu,j等(xi,n.,zhang,c.,shi,q.,&gregory,j.a geometry and optical property inspection system for automotive glass based on fringe patterns.optica applicata,40(4).)等人通过向透明元件投射可见光光条,根据经透明元件上表面与下表面的光条的灰度不同,来获取透明元件的上表面的形貌。然而当透明元件透光率较高时,很难通过光条的灰度区分相机采集到的光条究竟是由上表面反射的还是下表面反射的。
4.wang,r等(li,d.(2019,september).transparent element surface measurement using binary pattern in phase-measuring deflectometry.in advances in metrology for x-ray and euv optics viii(vol.11109,p.111090p).international society for optics and photonics.)等人通过向平板玻璃投射二进制条纹,来区分来自玻璃上下表面反射的可见光液晶屏幕条纹图案,从而成功获得平板玻璃的表面面形。然而,该测量方式仅适用于表面曲率不大的平板玻璃结构。
5.faber,c等(knauer,m.c.,&g.(2009).can deflectometry work in presence of parasitic reflections?.in proc.dgao(vol.110,p.a10).),wang,r(li,d.,xu,k.,tang,l.,&chen,p.(2019,january).study on eliminating the effect of parasitic reflection on deflectometry measurement of planar optical element surface figure.in 9th international symposium on advanced optical manufacturing and testing technologies:meta-surface-wave and planar optics(vol.10841,p.1084119).international society for optics and photonics.),siwei,t等(huimin,y.,hongli,c.,tianhe,w.,jiawei,c.,&yuxiang,w.(2019).elimination of parasitic reflections for objects with high transparency in phase measuring deflectometry.results in physics,15,102734.)等公知文献中,通过可见光屏幕投射多组频率条纹,通过非线性优化来最终区分透明元件的上下表面信息。然而这几种方法在带有曲率的透明元件测量过程中,都极有可能出现如上下表面同时反射成像于屏幕的同一位置等病态部分,导致无法通过文献中的优化算法提取正确的上下表面信息。另外的,这几种方法除了需要拍摄大量不同频率的条纹图像外,其中的优化算法需要逐像素地进行计算,
因此其测量与透明元件表面形貌解算耗时较长。
6.针对大部分有机树脂与玻璃材料,其对于紫外光线有很好的吸收作用。针对该问题,sprenger d等(faber c,seraphim m,g.uv-deflectometry:no parasitic reflections[c]//proc.dgao.2010,111:a19.)首先提出了一种紫外光偏折术,其使用紫外光源,和特制的可移动狭缝与相机组成了该系统。然而,该方法需要将狭缝移动若干位置,以实现紫外光源透过狭缝形成的光条在透镜表面的扫掠。其测量分辨率受狭缝移动单次移动距离影响,想得到高分辨率的测量结果,则需要较长的测量时间。除此之外,能否准确提取光条中心位置也是影响测量结果是否准确的决定性因素。
[0007]
lampalzer r等(method and apparatus for the three-dimensional measurement of the shape and the local surface normal of preferably specular objects:u.s.patent 8,284,392[p].2012-10-9.)公开了一种涵盖可见光、红外与紫外波段的相移偏折术,其被用来测量镜面表面,或透件的其中一个表面。其认为结构光显示设备为平面,然而液晶显示器等显示设备往往不是理想平面,其存在一定的平面度偏差。如果在测量过程中,不考虑对显示设备面形的补偿,这部分未补偿的显示设备面形将会给测量得到的面形结果引入误差,造成测量的不准确。
技术实现要素:
[0008]
发明目的:提供一种透镜面形测量装置及方法,测量结果准确。
[0009]
技术方案:一种透镜面形测量装置,包括设置在待测透镜同侧且面向透镜的相机组及紫外光液晶显示器;所述紫外光液晶显示器上显示的紫外光条纹信息经过待测透镜表面反射调制后进入相机组。
[0010]
在测量装置中,待测透镜不仅可以被认为是一个绝对平面结构,而且可以被考虑为一个具有面形的立体结构。
[0011]
进一步,所述紫外光液晶显示器上显示的紫外光波长范围为10~400nm,属okp-1、pmma、钠钙玻璃等透镜常用制成材料能将此波段的紫外光几乎完全吸收。
[0012]
进一步,所述紫外光液晶显示器包括采用紫外灯管作为背光的液晶显示器、采用紫外发光二极管(led)作为背光的液晶显示器、采用作为紫外发光灯珠(led)作为背光的液晶显示器、采用紫外投影仪(dlp)作为背光的液晶显示器或采用紫外有机发光二极管(oled)自发光的液晶显示器。
[0013]
进一步,所述紫外光液晶显示器上设置匀光膜、匀光透镜或导光板,用于使屏幕亮度更加均匀。
[0014]
进一步,所述紫外光液晶显示器至少设置一台。
[0015]
进一步,所述相机组对紫外光的波长响应范围包含10nm至400nm,同时可以包含大于400nm的响应波段范围。
[0016]
一种透镜面形测量方法,包括以下步骤:
[0017]
(1)搭建测量装置,对测量装置进行标定和位置调试;
[0018]
(2)在紫外光液晶显示器上显示条纹信息,对相机组采集的条纹信息进行绝对相位展开,求解相机组每个像素接收到的紫外光线是由紫外光液晶显示器的某个位置显示发射出的;
[0019]
(3)通过相机成像参数标定、相机与紫外光液晶显示器位置关系标定、紫外光液晶显示器面形标定以及相机每个像素接收到的紫外光线与其对应的紫外光液晶显示器发射出的紫外光线,利用光线反射定律和几何关系即可计算得到相机每个像素对应拍摄到的透镜表面面形信息。
[0020]
进一步,步骤(2)采用时间相位解包裹算法获得相机组每个像素对应拍摄到的显示器像元的位置。
[0021]
进一步,步骤(3)通过相机内参标定,可获得相机组内参照相机某一像素对应的射线,在射线上搜索高度,使此高度下该相机组内的其他相机对应接收到的入射光线与出射光线满足反射定律,并满足相机组内所有相机在该点的法矢一致,获得该像素对应的透镜高度,找到参照相机所有像素对应的透镜高度,最终得到透镜对应侧表面面形。
[0022]
由以上本发明的方案可见,本发明的显著优点在于:
[0023]
1、引入紫外光对透镜进行测量。充分利用透镜材料对波长紫外光几乎完全吸收的特性,利用紫外光照排除了透镜底面反射光对上表面的影响,实现透镜上表面的准确测量。
[0024]
2、接利用紫外液晶显示器像元等间距整行整列排布的特性,能够更加方便、准确的利用紫外液晶显示器投影出准确的条纹图像信息,进一步地保证了后续测量结果地准确性。
[0025]
3、首先利用相机采集经透镜表面反射调制后的紫外光液晶显示器显示的条纹,通过条纹相位解算得到的绝对相位,获得相机每个像素拍摄到的光线对应于紫外光液晶显示器的像元位置。由于紫外光液晶显示器像元等间距整行整列排布的特性,在已知像元间距的前提下,根据像元位置即可获得紫外光液晶屏幕上光线出射点的二维尺寸物理坐标。进一步利用紫外光液晶屏幕相对于相机位置、以及紫外光液晶屏幕的面形标定结果,可以获得紫外光液晶屏幕上光线出射点的三维尺寸物理坐标。借助相机成像参数标定结果以及光线反射定律,最终获得透镜表面三维形貌。
[0026]
4、不仅可以对高透光率透明元件测量,同时避免了使用多频率法中求解的病态情况,且不需要考虑狭缝的移动对测量分辨率的影响。在精度方面,因为考虑了结构光投影设备屏幕的三维形貌,因此其对透镜表面的测量结果也更加准确。
附图说明
[0027]
图1为本发明测量装置的结构示意图;
[0028]
图2为透镜上表面测量原理示意图;
[0029]
图3为测量装置两台相机与紫外光液晶显示器相对位置关系标定结果示意图;
[0030]
图4为紫外光液晶显示器面形的标定结果示意图;
[0031]
图5透镜上表面面形测量结果示意图。
具体实施方式
[0032]
一种透镜面形测量装置,如图1所示,包含一台连接所有相机1、2和紫外光液晶显示器3的计算机7、一台采用波长为365nm的紫外led作为背光的分辨率为1920
×
1080的紫外光液晶显示器3、两台波段覆盖365nm的相机与材质为聚碳酸酯的待测透镜5。其中,计算机7用于控制紫外光液晶显示器3条纹信息的显示与两个相机1、2的图像采集,并进行计算以获
得测量结果。
[0033]
两个相机1、2与紫外光液晶显示器3通过机械装置固定,以保持相对位置关系不变。两台相机1、2以及紫外光液晶显示器3设置在待测透镜5上方,紫外光液晶显示器3显示的紫外光条纹信息经过待测透镜5上表面反射后进入两台相机1、2。
[0034]
采用上述透镜面形测量装置的测量方法,具体步骤如下:
[0035]
(1)搭建测量装置:
[0036]
将紫外光液晶显示器3与两台相机1、2摆放至面向待测透镜5上表面的方向,使两台相机1、2都能够观测到紫外光液晶显示器3上显示的条纹信息经过透镜5上表面反射调制后进入相机1、2的条纹信息。
[0037]
(2)对搭建的测量装置进行标定:
[0038]
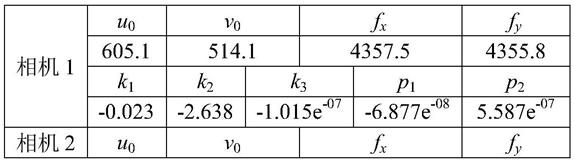
为了实现透镜5面形测量,需要对两台相机1、2及紫外光液晶显示器3进行标定。首先通过张正友标定,完成两台相机1、2小孔成像模型的内参标定,两台相机1、2的成像参数标定结果如表1:
[0039]
表1相机成像参数
[0040][0041][0042]
表中,(u0,v0)为小孔模型主点坐标,f
x
、fy为水平竖直两个方向焦距,k1、k2、k3为径向畸变系数,p1、p2为切向畸变系数。
[0043]
通过三坐标测量机中的点光源显微镜测头,完成两台相机1、2与紫外光液晶显示器3相对位置关系的测量,以及紫外光液晶显示器3面形的标定。两台相机1、2与紫外光液晶显示器3相对位置关系的标定结果如图3,紫外光液晶显示器3面形的标定结果如图4。
[0044]
(3)完成测量装置的搭建:
[0045]
将标定好的两台相机1、2与紫外光液晶显示器3固定并封装,形成测量装置。
[0046]
(4)将测量装置放置于可对透镜5进行测量的位置:
[0047]
调整测量装置各组件位置,使两台相机1、2能够观测到通过透镜5上表面反射的紫外光液晶显示器3上显示的紫外光条纹信息。
[0048]
(5)利用两台相机1、2采集经透镜5上表面反射调制后的紫外光液晶显示器3显示的紫外条纹信息,使用《huntley j m,saldner h.temporal phase-unwrapping algorithm for automated interferogram analysis[j].applied optics,1993,32(17):3047-3052.》中的时间相位解包裹算法,获得相机1、2每个像素x对应拍摄到的紫外光液晶显示器3像元x的位置:
[0049]
本实施例根据时间相位解包裹算法,在紫外光液晶显示器3上投影1至10共10组单频率条纹i1(x),其中每组条纹通过如公式(1)中的四步相移法求解包裹在[-π,+π)之间的
包裹相位φ(x):
[0050][0051]
式中,n为相移步数;
[0052]
相机每个像素x对应拍摄到的紫外光液晶显示器3像元x的位置关系可在对包裹相位φ(x)进行解包裹后的绝对相位中获得,绝对相位与包裹相位φ(x)的关系如下:
[0053][0054]
为了获得公式(2)中的系数k(x),利用不同组频率条纹之间的相位关系,定义频率t下绝对相位与包裹相位φ(x,t)的关系如下:
[0055][0056]
则第10组频率下屏幕像元x的位置与其对应的相机每个像素x的关系f(x)可由公式(4)计算得到:
[0057][0058]
其中,系数ν(x,10)可由公式(5)计算,其中round(
·
)表示对小数进行四舍五入取整:
[0059][0060]
(6)求解透镜5表面三维形貌信息:
[0061]
以获取图2中相机1中像素x1对应的透镜5高度z为例。
[0062]
通过相机1内参标定,可获得像素x1对应的射线l1,通过绝对相位获得相机1像素x1对应紫外光液晶显示器3的屏幕点p1。在射线l1某一高度z上,根据反射定律,由相机1像素x1、高度z、对应屏幕点p1可以计算出曲面法矢1。此外,在该高度下,根据相机2的内参标定结果,可以获得其对应的像素x2,通过绝对相位获得相机2像素x2对应屏幕点p2。进而根据反射定律,由相机2像素x2、高度z、对应屏幕点p2可以计算出曲面法矢2。判断曲面法矢1和曲面法矢2是否重合,若重合即该点即为像素x1对应的透镜5高度,属于透镜5上表面面形;若不重合,继续在射线l1其他高度上进行计算,直到找到两法矢的重合点。遍历所有相机1中的所有像素点,即可最终获取透镜5上表面面形。
[0063]
在图2的示例中,已知像素x1、射线l1和像素x1对应屏幕点p1,在射线l1上搜索不同高度za,zb,zc……
,根据相机2的内参标定结果,获得不同高度za,zb,zc下相机2对应的不同像素x
2a
,x
2b
,x
2c
,像素x
2a
对应屏幕点p
2a
,像素x
2b
对应屏幕点p
2b
,像素x
2c
对应屏幕点p
2c
……
。可以看到,高度za和高度zc处实线箭头表示的曲面法矢1与虚线箭头表示的曲面法矢2不一致,故这两点不是像素x1对应的透镜5高度,在高度zb处曲面法矢1和曲面法矢2一致,即该点即为像素x1对应的透镜5高度。
[0064]
按照上述过程找到相机1中所有像素对应的透镜高度,最终获取透镜5上表面面形,其结果如图5所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1