一种基于数字条纹投影三维测量条纹主值相位提取方法与流程
1.本发明涉及光学三维测量技术领域,尤其涉及一种基于数字条纹投影三维测量条纹主值相位提取方法。
背景技术:
2.利用数字投影仪实现的投影条纹法是一种最为普通、有效的三维形貌测量技术;因其低成本、高可靠性、高精度、快速的特点,该方法在许多领域中被普遍采用,包括生物医学应用、人体身形测量、逆向工程以及质量控制;在相移投影条纹法中,一系列由计算机生成的正弦条纹被投影到被测物体表面,然后由相机拍摄;通过相位提取、去包裹和系统标定,可以重构出物体的形貌。
3.在相位提取技术环节,最常用的是等步长四步相移算法,然而在实际使用中,为了获得更好的视觉效果,商用的数字投影仪被设计制造成光学非线性的,即存在伽马效应;在伽马效应的影响下,数字投影仪投射出的变成了非正弦条纹(含高阶谐波项),再使用等步长四步相移算法或者现有其他专利提出的改进型算法,例如专利cn112184788 a一种四步相移的主值相位提取方法,计算相位主值时,得到的相位主值误差较大。
技术实现要素:
4.本发明所要解决的技术问题是:利用四组相移条纹结合十六帧变形条纹图像提取主值相位,解决数字投影仪伽马效应导致相位主值误差偏大的问题。
5.本发明所采用的技术方案是:一种基于数字条纹投影三维测量条纹主值相位提取方法包括以下步骤:
6.s1、设计四组相移条纹图像序列并用计算机生成对应的图片,其数学模型为:
7.第1组:
8.第2组:
9.第3组:
10.第4组:
11.其中,ii(x,y)为第i帧条纹图像在像素(x,y)处的光强分布;(x,y)为第x行第y列的像素坐标;为像素坐标(x,y)处的条纹主值相位;x=1,2,...,height,y=1,2,...,width;width为设定的图像像素列数,height为设定的图像像素行数;a(x,y)为条纹图像的平均灰度;b(x,y)为条纹图像的调制灰度;
12.由于伽马效应影响,相机采集的非正弦条纹图像光强度可表示为:
[0013][0014]
利用傅里叶级数展开,可改写为:
[0015][0016]
其中,k为一非负整数。考虑8阶谐波,即k=8,利用等步长四步相移算法计算条纹相位主值的误差为:
[0017][0018]
其中,q=b3/b1,r=b5/b1,s=b7/b1,由于r<<q,s<<q,r、s的影响可忽略,误差可简化为:
[0019]
此基础上额外引入三组带有初始相位(22.5
°
,45
°
,-22.5
°
)偏差的相移条纹图,则对应的相位提取误差为:
[0020][0021][0022][0023]
不难发现δφ+δφ'+δφ”+δφ”'=0;
[0024]
s2、利用数字投影仪将s1中生成的图片依次投影到被测物体表面,并同步采集物体表面调制的条纹图像序列,
[0025]
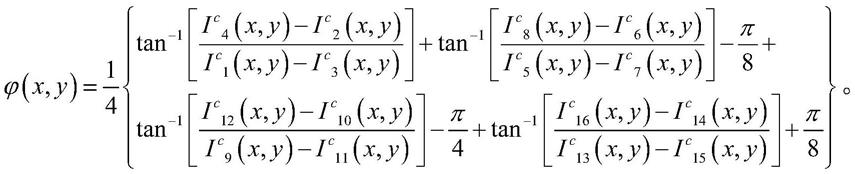
s3、对步骤s2的十六帧变形条纹图像提取主值相位,条纹相位主值公式为:
[0026]
[0027]
本发明的有益效果是:
[0028]
1、本发明方法可以有效减小由于数字投影仪伽马效应引起的相位主值提取误差。
附图说明
[0029]
图1是本发明的基于数字条纹投影三维测量条纹主值相位提取方法流程图;
[0030]
图2是本发明条纹图像i
1-i
16
;
[0031]
图3是本发明测量平面铝板时的相位主值误差;
[0032]
图4是等步长四步相移算法相位主值误差;
[0033]
图5是本发明伽马效应条纹图像i
1-i
16
;
[0034]
图6是专利cn112184788a方法的条纹图像i
1-i4;
[0035]
图7是本发明对伽马效应条纹图像的相位主值误差;
[0036]
图8是专利cn112184788a方法对伽马效应条纹图像的相位主值误差。
具体实施方式
[0037]
下面结合附图和实施例对本发明作进一步说明,此图为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
[0038]
实施例1:如图1所示,一种基于数字条纹投影三维测量条纹主值相位提取方法包括以下步骤:
[0039]
s1、生成4组相移条纹图像,其光强分布满足:
[0040]
第1组:
[0041]
第2组:
[0042]
第3组:
[0043]
第4组:
[0044]
设置生成竖直方向的余弦条纹,参数如表1所示:
[0045][0046]
在matlab编程环境下生成条纹图像,对应的条纹图像如图2所示;
[0047]
s2、采用投影仪将实施例s1中生成的条纹图像依次投射到平面铝板表面,并用工业相机采集经平面铝板调制的变形后的条纹图像;
[0048]
s3、将s2中得到的条纹图像代入本发明的相移计算公式,计算相位主值,条纹相位主值公式为;
[0049][0050]
得到平面铝板的相位主值误差如图3所示;
[0051]
作为对比,将s2中得到的条纹图像i1,i2,i3,i4代入等步长四步相移算法同样得到平面铝板的相位主值误差,效果如图4所示;
[0052]
本发明的方法计算的误差相比于等步长四步相移的均方根误差减小了93.1%,足见本发明的有益效果;
[0053]
实施例2:利用本发明方法生成4组考虑了投影仪伽马效应的相移条纹图像,设置生成竖直方向的余条纹,参数如表2所示:
[0054][0055]
在matlab编程环境下生成条纹图像,对应的条纹图像如图5所示;
[0056]
利用专利cn112184788a方法生成1组考虑了投影仪伽马效应的相移条纹图像,光强分布满足:
[0057][0058][0059][0060][0061]
设置生成竖直方向的正弦条纹,参数如表3所示:
[0062][0063]
在matlab编程环境下生成条纹图像,对应的条纹图像如图6所示;
[0064]
利用本发明方法对图5计算相位主值,得到图像第500行的相位主值误差,如图7所示;
[0065]
利用专利cn112184788a方法中公式:对图6计算相位主值,得到图像第500行的相位主值误差,如图8所示;
[0066]
图7本发明方法的相位主值误差rms值为8.79e-4,而专利cn112184788a方法计算的相位误差rms值为0.187,对比之下本发明的方法得到的均方根误差仅为参考专利方法的0.47%,足见本发明的有益效果;
[0067]
以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1