一种合成孔径雷达图像聚焦方法与流程
1.本发明涉及雷达图像处理技术领域,尤其涉及一种合成孔径雷达图像聚焦方法。
背景技术:
2.近年来随着隐身装备的服役,在维护保养现场环境下通过rcs(雷达散射截面积)近场测量开展装备隐身性能诊断评估的方法受到越来越多的关注。该方法一般利用二维平面扫描架,实现装备特定姿态角度下的二维散射中心分布图像获取。而和传统rcs近场测量方式相比,车载雷达rcs近场扫描测量系统不受测试场地缺少转台/导轨、低散射金属支架等硬件条件的限制,在全尺寸目标的散射特性测试方面具有机动性强、成本低的优势。但是直接采用车载雷达平台绕目标一周运动的全向sar(合成孔径雷达)模式进行测试,受平台在地面运动精度的限制,直接成像图像会产生散焦现象;且成像的分辨率越高受运动误差的影响越严重,当运动误差达到波长级时会使得雷达图像质量急剧恶化;因此运动误差补偿成为获取高质量雷达图像的不可或缺的技术。
3.针对以上不足,需要提供一种合成孔径雷达图像聚焦方法,解决成像图像散焦、雷达图像质量低的问题。
技术实现要素:
4.本发明要解决的技术问题在于雷达平台运动的不确定性导致运动误差,从而产生回波数据相位误差。针对现有技术中的缺陷,基于雷达平台运动误差引起的相位误差是空不变的,提供一种合成孔径雷达图像聚焦方法,解决成像图像散焦、雷达图像质量低的问题。
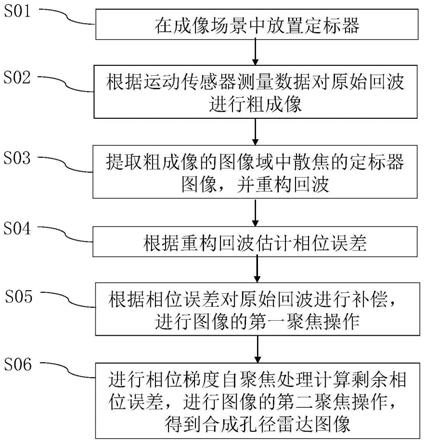
5.为了解决上述技术问题,本发明提供了一种合成孔径雷达图像聚焦方法,其特征在于,包括如下步骤:在成像场景中放置定标器;根据运动传感器测量数据对原始回波进行粗成像;提取粗成像的图像域中散焦的定标器图像,并重构回波;根据重构回波估计相位误差;根据相位误差对原始回波进行补偿,进行图像的第一聚焦操作;进行相位梯度自聚焦处理计算剩余相位误差,进行图像的第二聚焦操作,得到合成孔径雷达图像。
6.优选地,提取粗成像的图像域中散焦的定标器图像,并重构回波的步骤中,通过加窗的方法,在粗成像的图像域截取散焦的定标器图像,并进行回波重构。
7.优选地,根据重构回波估计相位误差的步骤中,通过对回波重构得到的散焦的定标器的回波数据和位于定标器处的理想点目标的回波数据作对比,得到由残余运动误差引起的相位误差,相位误差可表示为,
[0008][0009]
其中,sr(θ,k)为根据截取散焦的定标器复图像数据重建的回波数据,haxθ,k)为位于定标器处的理想点目标的回波数据。
[0010]
优选地,根据截取散焦的定标器复图像数据重建的回波数据sr(θ,k)可表示为,
[0011][0012]
其中,g
∈
(x,y)为截取的定标器误差复图像,θ为运动传感器记录的角度,k为距离向波数,r
xy
(θ)为成像区域像素点到雷达测量位置的距离。
[0013]
优选地,位于定标器处的理想点目标的回波数据ha(θ,k)可表示为,
[0014]
ha(θ,k)=exp(-j2kr
ae
(θ)),
[0015]
其中,θ为运动传感器记录的角度,k为距离向波数,r
ae
(θ)为点目标到理想运动轨迹的距离。
[0016]
优选地,根据相位误差对原始回波进行补偿,进行图像的第一聚焦操作的步骤中,在原始回波的基础上进行与相位误差项共轭相乘的第一聚焦操作,以消除残余运动误差的影响,相位误差补偿后的回波数据s1(θ,k)可表示为,
[0017]
s1(θ,k)=s0(θ,k)
·
exp(-jφ
ε
(θ,k)),
[0018]
式中,s0(θ,k)为原始回波。
[0019]
优选地,根据相位误差对原始回波进行补偿,进行图像的第一聚焦操作的步骤后,对进行第一聚焦操作得到的相位误差补偿后的回波数据s1(θ,k)进行试验滤波-逆投影算法成像。
[0020]
优选地,进行相位梯度自聚焦处理计算剩余相位误差,进行图像的第二聚焦操作,得到合成孔径雷达图像的步骤中,包括如下过程:获取复图像域数据,对复图像域数据进行圆周移位操作;对圆周移位操作后的复图像域数据进行加窗操作;估计相位梯度,并构建相位误差函数,通过相位误差函数计算剩余相位误差;根据剩余相位误差进行相位误差补偿并成像;进行循环迭代操作,直至成像满足成像标准,得到合成孔径雷达图像。
[0021]
优选地,成像标准为循环迭代操作的循环次数为4次。
[0022]
优选地,成像标准为剩余相位误差小于π/10,或成像标准为成像的图像熵值小于预设值。
[0023]
实施本发明的合成孔径雷达图像聚焦方法,具有以下有益效果:运动传感器测量数据和雷达原始回波数据均含有雷达平台的运动轨迹的信息,通过对二者的分析和处理,可以估计出由残余运动误差引起的相位误差,把其补偿至原始回波中,可以实现图像的聚焦;再利用初步聚焦图像中方位向上误差相位的冗余性,经过相位梯度自聚焦处理,可以更进一步改善图像质量,提高聚焦效果。
附图说明
[0024]
图1是本发明实施例的合成孔径雷达图像聚焦方法的流程图;
[0025]
图2是合成孔径雷达平台数据采集几何模型;
[0026]
图3是本发明实施例的合成孔径雷达图像聚焦方法的第二聚焦操作的流程图。
具体实施方式
[0027]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人
员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0028]
图1是本发明实施例的合成孔径雷达图像聚焦方法的流程图;如图1所示,本发明实施例提供的合成孔径雷达图像聚焦方法,包括如下步骤;
[0029]
步骤s01:在成像场景中放置定标器;
[0030]
步骤s02:根据运动传感器测量数据对原始回波进行粗成像;
[0031]
步骤s03:提取粗成像的图像域中散焦的定标器图像,并重构回波;
[0032]
步骤s04:根据重构回波估计相位误差;
[0033]
步骤s05:根据相位误差对原始回波进行补偿,进行图像的第一聚焦操作;
[0034]
步骤s06:进行相位梯度自聚焦处理计算剩余相位误差,进行图像的第二聚焦操作,得到合成孔径雷达图像。
[0035]
本发明实施例是一种基于图像域相位误差估计以及相位梯度自聚焦(pga)的合成孔径雷达(sar)图像聚焦方法,利用测量精度不太高的运动传感器测量雷达平台运动轨迹,对sar回波进行粗成像;在成像场景中放置定标器,提取粗成像的图像域中散焦的定标器图像,进行回波重构;把利用重构回波和理想回波信号作比较得到的相位误差补偿到原始回波中,使图像聚焦;通过相位梯度自聚焦估计剩余相位误差,完成图像的进一步聚焦,得到质量良好的sar图像。本发明把基于运动传感器的sar图像聚焦方法和基于回波数据的sar图像聚焦方法结合起来,更进一步提高了算法的图像聚焦效果,改善了成像质量。
[0036]
运动传感器测量数据和雷达原始回波数据均含有雷达平台的运动轨迹的信息,通过对二者的分析和处理,可以估计出由残余运动误差引起的相位误差,把其补偿至原始回波中,可以实现图像的聚焦;再利用初步聚焦图像中方位向上误差相位的冗余性,经过pga处理,可以更进一步改善图像质量,提高聚焦效果。运动误差为雷达平台运动参数测量误差,是导致雷达成像质量恶化的主要原因,根据雷达成像理论,当雷达运动平台偏离理想运动轨迹时,只要雷达和目标的精确位置已知,便可实现高质量成像。图2是合成孔径雷达平台数据采集几何模型;如图2所示,p(x0,y0,0)为点目标,a(x,y,z)为sar理想位置,a1(x1,y1,z1)为sar实际位置,由于运动误差的存在二者不一致。按照这一思路,本发明实施例提出了基于差分gps测量数据进行粗成像的成像方法,即利用安装在雷达平台上的精度不太高的差分gps模块记录的平台运动数据对目标回波信号进行相位补偿,从而减小运动误差,改善成像质量,得到粗聚焦的sar图像。
[0037]
本发明实施例提供的合成孔径雷达图像聚焦方法,提取粗成像的图像域中散焦的定标器图像,并重构回波的步骤中,通过加窗的方法,在粗成像的图像域截取散焦的定标器图像,并进行回波重构。通过在场景中放置定标器,首先对场景进行粗成像,在图像域对散焦的定标器图像加窗,减小杂波的干扰,然后根据重建回波的方法估计残余运动误差引起的相位误差,最后将残余运动误差引起的相位误差补偿至原始回波中,完成图像的聚焦。该方法不依赖于定标器回波有较高的信杂比,通过图像域加窗实现信号和杂波的分离,提高估计精度。
[0038]
本发明实施例中,运动传感器测量数据包括运动传感器记录的雷达轨迹(即测量轨迹),用于对原始回波进行粗成像,粗成像的图像域中散焦的定标器图像的回波重构,以及根据相位误差对原始回波进行补偿。
[0039]
本发明实施例提供的合成孔径雷达图像聚焦方法,根据重构回波估计相位误差的
步骤中,通过对回波重构得到的散焦的定标器的回波数据和位于定标器处的理想点目标的回波数据作对比,得到由残余运动误差引起的相位误差,相位误差可表示为,
[0040][0041]
其中,sr(θ,k)为根据截取散焦的定标器复图像数据重建的回波数据,ha(θ,k)为位于定标器处的理想点目标的回波数据。上式的物理意义为,相位误差为误差图像的重建回波sr(θ,k)和理想图像的重建回波ha(θ,k)的相位差。通过对回波重构得到的散焦的定标器的回波数据和位于定标器处的理想点目标的回波数据作对比,可以得到由残余运动误差引起的整个波数域k内的相位误差
[0042]
根据截取散焦的定标器复图像数据重建的回波数据sr(θ,k)可表示为,
[0043][0044]
其中,g
∈
(x,y)为截取的定标器误差复图像,θ为运动传感器记录的角度,k为距离向波数,r
xy
(θ)为成像区域像素点到雷达测量位置的距离。上式的双重积分相当于以定标器误差复图像g
∈
(x,y)为目标重新生成回波。
[0045]
位于定标器处的理想点目标的回波数据ha(θ,k)可表示为,
[0046]
ha(θ,k)=exp(-j2kr
ae
(θ)),
[0047]
其中,θ为运动传感器记录的角度,k为距离向波数,r
ae
(θ)为点目标到理想运动轨迹的距离。由以上两次回波重构可以得到散焦的定标器的重建回波数据和位于定标器处的理想点目标的回波数据。
[0048]
本发明实施例提供的合成孔径雷达图像聚焦方法,根据相位误差对原始回波进行补偿,进行图像的第一聚焦操作的步骤中,在原始回波的基础上进行与相位误差项共轭相乘的第一聚焦操作,以消除残余运动误差的影响,相位误差补偿后的回波数据s1(θ,k)可表示为,
[0049]
s1(θ,k)=s0(θ,k)
·
exp(-jφ
ε
(θ,k)),
[0050]
式中,s0(θ,k)为原始回波。误差补偿即预先在完整的原始回波s0(θ,k)的基础上与相位误差项共轭相乘,作为后续成像处理的回波数据,以消除残余运动误差的影响。
[0051]
本发明实施例提供的合成孔径雷达图像聚焦方法,根据相位误差对原始回波进行补偿,进行图像的第一聚焦操作的步骤后,对进行第一聚焦操作得到的相位误差补偿后的回波数据s1(θ,k)进行试验滤波-逆投影算法成像,得到聚焦效果较好的sar图像。
[0052]
图3是本发明实施例的合成孔径雷达图像聚焦方法的第二聚焦操作的流程图,如图3所示,本发明实施例提供的合成孔径雷达图像聚焦方法,进行相位梯度自聚焦处理计算剩余相位误差,进行图像的第二聚焦操作,得到合成孔径雷达图像的步骤中,包括如下过程:
[0053]
步骤s061:获取复图像域数据,对复图像域数据进行圆周移位操作;
[0054]
步骤s062:对圆周移位操作后的复图像域数据进行加窗操作;
[0055]
步骤s063:估计相位梯度,并构建相位误差函数,通过相位误差函数计算剩余相位误差;
[0056]
步骤s064:根据剩余相位误差进行相位误差补偿并成像;
[0057]
步骤s065:进行步骤s061-步骤s064的循环迭代操作,直至成像满足成像标准,得到合成孔径雷达图像。
[0058]
其中,步骤s061中,复图像域数据是经过第一聚焦操作得到的,或者是由步骤s064成像得到的。
[0059]
本发明实施例提供的合成孔径雷达图像聚焦方法,成像标准为循环迭代操作的循环次数为4次,或成像标准为剩余相位误差小于π/10,或成像标准为成像的图像熵值小于预设值。
[0060]
综上所述,实施本发明的合成孔径雷达图像聚焦方法,具有以下有益效果:运动传感器测量数据和雷达原始回波数据均含有雷达平台的运动轨迹的信息,通过对二者的分析和处理,可以估计出由残余运动误差引起的相位误差,把其补偿至原始回波中,可以实现图像的聚焦;再利用初步聚焦图像中方位向上误差相位的冗余性,经过相位梯度自聚焦处理,可以更进一步改善图像质量,提高聚焦效果。
[0061]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1