1.本发明涉及巷道掘进掘锚机定位系统激光测距设备领域,具体涉及一种煤矿快速掘进中掘锚机用激光测距装置快速移动平台及激光调校方法。
背景技术:2.在巷道掘进过程中需要时刻监测并控制掘锚机的三个参数:到煤壁距离、到左侧帮距离、到右侧帮距离。监测与煤壁距离是为了获得截割滚筒相对煤壁位置,控制截割深度;监测与两帮距离是为了获得机体相对巷道侧面位置,控制掘进方向,避免掘锚机与巷道相撞。监测掘锚机这三个参数可以通过激光测距仪,相对操作员肉眼观察,主观判断,激光测距仪更高效且精确,省去了停机测量的时间,大大提高了掘进效率,同时提高了掘进工程人员安全。
3.为了减少激光测距仪在掘锚机定位测距时的使用数量,避免固定点位激光测距误差,必须设计可以实现激光测距仪在不同点位间的快速移动装置,该装置还应具备自动调节激光发射方向的功能,保证激光垂直打在监测平面。
技术实现要素:4.本发明要解决的技术问题是提供一种煤矿快速掘进中掘锚机用激光测距装置快速移动平台。所述激光测距装置快速移动平台可以在机体不同位置灵活安装。
5.本发明要解决的技术问题是提供一种煤矿快速掘进中掘锚机用激光测距装置快速移动平台。所述激光测距装置快速移动平台可以实现激光测距仪在不同点位高速往复运动,减少测距仪安装数量。
6.本发明要解决的技术问题是提供一种煤矿快速掘进中掘锚机用激光测距装置快速移动平台。所述激光测距装置快速移动平台可以调整激光束发射方向,确保激光垂直打在所测平面。
7.为解决上述技术问题,本发明所采用的技术方案为:一种煤矿快速掘进中掘锚机用激光测距装置快速移动平台装置及激光调校方法,包括用于固定装置的基座部分、用于承载和调整激光测距仪位姿的快速移动平台部分和激光测距仪部分。
8.所述基座部分在所述快速移动平台部分下方,通过螺栓与掘锚机机体连接。
9.所述快速移动平台部分通过螺栓安装在所述基座部分上,具有一个平移自由度和两个转动自由度。
10.所述激光测距仪部分安装于所述快速移动平台上,通过所述快速移动平台实现激光测距仪往复运动和激光发射方向的调整,确保激光束发射方向时刻垂直于所测巷道平面。
11.所述激光测距装置快速移动平台可以减少用于掘锚机定位所需激光测距仪的数量,并避免固定点位测距数据受煤壁及侧帮平整度的影响。
12.所述煤矿快速掘进中掘锚机用激光测距装置快速移动平台的使用方法如下:一台掘锚机需要三套该装置,分别安装于掘锚机截割臂上方及机体左右两侧。其中,截割臂上方平台安装时长度方向与滚筒轴线平行,调整测距仪旋转轴轴线与滚筒轴线平行,测距仪俯仰角由控制系统经步进电机调整,使激光方向时刻垂直于煤壁,控制系统数据由截割臂上角度传感器获得;用于监测所述测距仪运动路径上不同点位处机体与煤壁及侧帮的距离;机体两侧平台安装时长度方向与水平面平行,调整测距仪旋转轴轴线与侧邦平行,测距仪俯仰角由控制系统经步进电机调整,使激光方向时刻垂直于煤壁;激光测距仪往复运动以获得路径上不同点位处掘锚机与煤壁及侧帮的距离。
13.进一步的,所述基座部分包括一个安装平台和四个高度调节装置;所述安装平台,四个角设有四个通孔,中间设有一排通孔,四个角的通孔用于固定所述安装平台,中间通孔用于安装所述快速移动平台;所述高度调节装置,包括一个螺栓和两个螺母,螺栓头焊接在掘锚机机体,一个螺母事先璇入螺栓,然后将螺栓插入所述安装平台四个处的通孔,将另一个螺母璇入螺栓拧紧,通过调节螺栓长度和螺母位置可以将所述基座部分固定在机体任意位置。
14.进一步的,所述的快速移动平台部分包括:一个横向移动机构,用与调节激光测距装置在直线导轨上的位置;一个转向调节机构,用于调节激光测距装置在平行直线导轨平面内的角度;一个俯仰调节机构,用于调节激光测距装置在垂直直线导轨平面内的角度。
15.进一步的,所述横向移动机构包括一个直线电机、一个直线轨道和一个移动平台;所述横向移动机构所包含的直线电机,分为定子和动子两部分,定子上有一排通孔,用于将所述直线电机固定在安装平台上,动子套在定子内部,通过螺纹孔固定在所述移动平台上,借助电磁力带动移动平台往复运动;所述横向移动机构所包含的直线轨道,设有两排通孔,用来将所述直线轨道固定于所述直线电机定子上表面;所述横向移动机构所包含的移动平台,嵌套安装在所述直线轨道上,矩形一侧通过通孔与所述直线电机动子连接;所述横向移动机构所包含的移动平台,中间有一大通孔,用于放置上方转动机构旋转轴;所述横向移动机构所包含的移动平台,梯形一侧有一小通孔及两个定位通孔,用于安装所述转向调节机构电机。
16.进一步的,所述转向调节机构包括一个步进电机、一个小齿轮和一个转动平台;所述转向调节机构所包含的步进电机,安装在所述移动平台梯形一侧;所述转向调节机构所包含的小齿轮,安装在所述步进电机输出轴上,将电机输出转矩通过齿轮啮合传递到所述转动平台;所述转向调节机构所包含的转动平台,其旋转轴穿过下方所述移动平台的大通孔部分; 所述转向调节机构所包含的转动平台,弧形一侧为齿形边缘,通过与安装在所述步进电机上的小齿轮配合来调整转动平台转向角度。所述转向调节机构所包含的转动平台,弧形一侧上方为两带通孔的垂直支架,用于安装所述激光测距仪;所述转向调节机构所包含的转动平台,矩形一侧上方为一带定位螺纹孔的垂直平板,用于安装所述俯仰调节机构电机。
17.进一步的,所述俯仰调节机构包括一个步进电机、一个小带轮、一个大带轮和一条同步带;所述俯仰调节机构所包含的步进电机,安装在所述转动平台矩形一侧上方垂直平板上;所述俯仰调节机构所包含的小带轮,安装在所述步进电机输出轴上;所述俯仰调节机构所包含的大带轮,安装在激光测距仪转动轴上;所述俯仰调节机构所包含的同步带,一侧
套在小带轮,另一侧套在大带轮;所述俯仰调节机构,通过同步带,将步进电机运动转换成所述激光测距仪摆动。
18.进一步的,所述激光测距仪,将激光发射器封装于一侧开口的长方体内;所述激光测距仪,非开口端设有旋转轴,旋转轴长端上安装所述的大带轮;所述激光测距仪,安装在所述俯仰调节机构的垂直支架上。
19.本发明的优点:(1)激光测距装置快速移动平台,实时监测掘锚机与煤壁及侧帮距离,省去了停机监测时间,提高了掘进效率,提高了设备运行的自动化,有效降低了安全事故发生概率,达到安全有序生产的目的;(2)激光测距装置快速移动平台,减少了激光测距仪的使用数量,改善了固定点位测量数据受巷道平整度的影响,可一次获得测距仪运动路径上的全部数据;(3)激光测距装置快速移动平台,可自动调节激光束发射方向,确保激光测距仪时刻指向被测平面。
附图说明
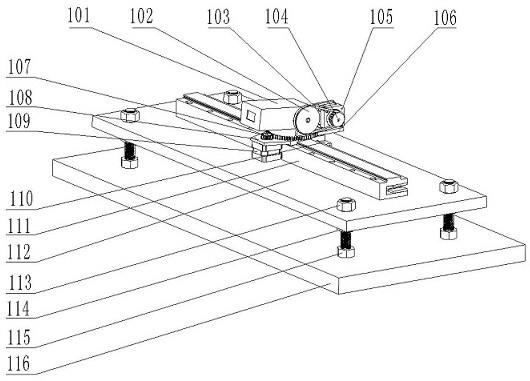
20.图1为本发明的一种煤矿快速掘进中掘锚机用激光测距装置快速移动平台的结构示意图。
21.图2为本发明的激光测距仪示意图。
22.图3为本发明的俯仰调节机构示意图。
23.图4为本发明的转向调节机构示意图。
24.图5为本发明的横向移动机构示意图。
25.图6为本发明的基座结构示意图。
26.图7为本发明在掘锚机的安装示意图。
27.图中,101—激光测距仪,102—大带轮,103—同步带,104—小带轮,105—俯仰机构步进电机,106—转动平台,107—小齿轮,108—移动平台,109—转向机构步进电机,110—直线电机动子,111—直线电机定子,112—安装平台,113—拧紧螺母,114—定位螺母,115—螺栓,116—掘锚机机体。
具体实施方式
28.下面结合附图对本发明实施方案进行清楚完整地描述。
29.参照图1至图7对本发明的一种煤矿快速掘进中掘锚机用激光测距装置快速移动平台及激光调校方法进行详细说明。图1是本发明一种煤矿快速掘进中掘锚机用激光测距装置快速移动平台的立体示意图,应用于煤矿巷道掘进中掘锚机的空间定位。
30.参照图2和图3,俯仰调节机构包括大带轮102、同步带103、小带轮104和俯仰机构步进电机105。激光测距仪101旋转轴与转动平台106垂直支架的孔配合,激光测距仪101可绕旋转轴上下摆动。激光测距仪101长轴端与大带轮102孔过盈配合,大带轮102通过同步带104与俯仰机构步进电机105输出轴上的小带轮104同步转动,俯仰机构步进电机105通过螺栓螺母安装在转动平台106垂直平板上。激光测距仪101在俯仰机构步进电机105带动下实现俯仰角度的细微调整。
31.参照图4,转向调节机构包括转动平台106、小齿轮107和转向机构步进电机109。转动平台106承载俯仰调节机构,下方通过旋转轴与移动平台108中间通孔配合,转动平台106
可绕旋转轴左右摆动。转向机构步进电机109通过螺栓螺母安装在移动平台108下端面,小齿轮107随转向机构步进电机109输出轴转动,通过齿轮传动将动力传递到转动平台106上。激光测距仪101在转向机构步进电机109带动下实现转动角度的细微调整。
32.参照图5,横向移动机构包括移动平台108、直线电机动子110和直线电机定子111。移动平台108承载转向调节机构,下方通过槽与直线电机定子111上方导轨配合,移动平台108可沿导轨往复运动。直线电机动子110通过螺钉固定在移动平台下端面,直线电机定子111通过螺栓螺母固定在安装平台112上方。激光测距仪101在直线电机动子110带动下实现往复直线运动。
33.参照图6,基座包括安装平台112、拧紧螺母113、定位螺母114和螺栓115。安装平台承载整个装置,通过螺栓螺母固定,其中螺栓115焊接在机体安装位置平面上,调节定位螺母114使安装平台112位于同一平面,安装平台112穿过螺栓115放置在定位螺母114上,旋紧拧紧螺母113使安装平台位置固定。
34.参照图7,装置一共三套,分别安装在掘锚机截割臂上方、机体左侧竖直平面和机体右侧竖直平面,通过转向机构步进电机和俯仰机构步进电机使激光测距仪正对监测平面。