基于级联结构的绝对式时栅直线位移传感器
1.本发明属于位移传感器领域,具体涉及一种基于级联结构的绝对式时栅直线位移传感器。
背景技术:
2.近年来国内研制出了一种以时钟脉冲作为位移测量基准的时栅直线位移传感器,并在此基础上研制了基于交变电场的差极型绝对式时栅直线位移传感器(公开号为cn208805152u),这种传感器能实现绝对直线位移测量,但是其仍然存在如下问题:激励电极ⅰ、ⅱ与接收电极ⅰ、ⅱ布置在同一块定尺基体上,相邻很近,接收电极ⅰ、ⅱ输出的行波信号会受到激励信号的干扰,限制了传感器信噪比和精度的进一步提高。
技术实现要素:
3.本发明的目的是提供一种基于级联结构的绝对式时栅直线位移传感器,以进一步优化传感器结构,提高传感器的测量精度。
4.本发明所述的一种基于级联结构的绝对式时栅直线位移传感器,包括定尺ⅰ和与定尺ⅰ正对平行安装并留有间隙的动尺,定尺ⅰ位于动尺下方,定尺ⅰ的基体上表面并排设有激励电极ⅰ、激励电极ⅱ,动尺的基体下表面并排设有感应电极ⅰ、感应电极ⅱ,感应电极ⅰ与激励电极ⅰ正对,感应电极ⅱ与激励电极ⅱ正对;该传感器还包括位于动尺上方的定尺ⅱ,定尺ⅱ与动尺正对平行安装并留有间隙,定尺ⅱ的基体下表面并排设有接收电极ⅰ、接收电极ⅱ,动尺的基体上表面并排设有反射电极ⅰ、反射电极ⅱ,反射电极ⅰ与接收电极ⅰ正对,且与感应电极ⅰ相连,反射电极ⅱ与接收电极ⅱ正对,且与感应电极ⅱ相连。
5.优选的,所述激励电极ⅰ由4m1个大小相同、极距为w1的矩形极片ⅰ沿测量方向等间距排列组成,第4n1+1号矩形极片ⅰ连成一组,组成a1激励电极组,第4n1+2号矩形极片ⅰ连成一组,组成b1激励电极组,第4n1+3号矩形极片ⅰ连成一组,组成c1激励电极组,第4n1+4号矩形极片ⅰ连成一组,组成d1激励电极组,n1依次取0至m
1-1的所有整数。所述激励电极ⅱ由4m2个大小相同、极距为w2的矩形极片ⅱ沿测量方向等间距排列组成,第4n2+1号矩形极片ⅱ连成一组,组成a2激励电极组,第4n2+2号矩形极片ⅱ连成一组,组成b2激励电极组,第4n2+3号矩形极片ⅱ连成一组,组成c2激励电极组,第4n2+4号矩形极片ⅱ连成一组,组成d2激励电极组,n2依次取0至m
2-1的所有整数;m2与m1互为质数,激励电极ⅱ的起始端与激励电极ⅰ的起始端对齐,w1*4m1=w2*4m2。所述感应电极ⅰ、感应电极ⅱ都具有m个测头,感应电极ⅰ由m*m3个大小相同、极距为的感应极片ⅰ沿测量方向等间距排列组成,相邻的m个感应极片ⅰ形成一个对极,感应电极ⅱ由m*m4个大小相同、极距为的感应极片ⅱ沿测量方向等间距排列组成,相邻的m个感应极片ⅱ形成一个对极;其中,m=1或2或3或4。
6.优选的,反射电极ⅰ具有m个矩形反射极片ⅰ,m个矩形反射极片ⅰ分别与感应电极ⅰ的m个测头对应相连,反射电极ⅱ具有m个矩形反射极片ⅱ,m个矩形反射极片ⅱ分别与感应
电极ⅱ的m个测头对应相连;接收电极ⅰ具有m个矩形接收极片ⅰ,m个矩形接收极片ⅰ分别与m个矩形反射极片ⅰ正对;接收电极ⅱ具有m个矩形接收极片ⅱ,m个矩形接收极片ⅱ分别与m个矩形反射极片ⅱ正对;每个矩形反射极片ⅰ、矩形反射极片ⅱ沿测量方向的长度都等于4w1*m3与4w2*m4中的较大值。
7.在工作状态下,动尺相对于定尺ⅰ、定尺ⅱ平行移动,a1、b1、c1、d1激励电极组与a2、b2、c2、d2激励电极组同时施加相位依次相差90
°
的四路同频等幅正弦激励信号,感应电极ⅰ、感应电极ⅱ耦合到的行波信号分别传递到反射电极ⅰ、反射电极ⅱ,然后经反射电极ⅰ与接收电极ⅰ之间的耦合电场以及反射电极ⅱ与接收电极ⅱ之间的耦合电场,在接收电极ⅰ和接收电极ⅱ上输出行波信号,输出的行波信号经处理后得到绝对直线位移值。
8.本发明所述的另一种基于级联结构的绝对式时栅直线位移传感器,包括定尺ⅰ和与定尺ⅰ正对平行安装并留有间隙的动尺,定尺ⅰ位于动尺下方,定尺ⅰ的基体上表面并排设有激励电极ⅰ、激励电极ⅱ,动尺的基体下表面并排设有感应电极ⅰ、感应电极ⅱ,感应电极ⅰ与激励电极ⅰ正对,感应电极ⅱ与激励电极ⅱ正对;该传感器还包括位于动尺上方的定尺ⅱ,定尺ⅱ与动尺正对平行安装并留有间隙,定尺ⅱ的基体下表面设有接收电极,动尺的基体上表面设有反射电极,反射电极与接收电极正对,且与感应电极ⅰ、感应电极ⅱ相连。
9.优选的,所述激励电极ⅰ由4m1个大小相同、极距为w1的矩形极片ⅰ沿测量方向等间距排列组成,第4n1+1号矩形极片ⅰ连成一组,组成a1激励电极组,第4n1+2号矩形极片ⅰ连成一组,组成b1激励电极组,第4n1+3号矩形极片ⅰ连成一组,组成c1激励电极组,第4n1+4号矩形极片ⅰ连成一组,组成d1激励电极组,n1依次取0至m
1-1的所有整数。所述激励电极ⅱ由4m2个大小相同、极距为w2的矩形极片ⅱ沿测量方向等间距排列组成,第4n2+1号矩形极片ⅱ连成一组,组成a2激励电极组,第4n2+2号矩形极片ⅱ连成一组,组成b2激励电极组,第4n2+3号矩形极片ⅱ连成一组,组成c2激励电极组,第4n2+4号矩形极片ⅱ连成一组,组成d2激励电极组,n2依次取0至m
2-1的所有整数;m2与m1互为质数,激励电极ⅱ的起始端与激励电极ⅰ的起始端对齐,w1*4m1=w2*4m2。所述感应电极ⅰ、感应电极ⅱ都具有m个测头,感应电极ⅰ由m*m3个大小相同、极距为的感应极片ⅰ沿测量方向等间距排列组成,相邻的m个感应极片ⅰ形成一个对极,感应电极ⅱ由m*m4个大小相同、极距为的感应极片ⅱ沿测量方向等间距排列组成,相邻的m个感应极片ⅱ形成一个对极;其中,m=1或2或3或4。
10.优选的,反射电极具有m个矩形反射极片,m个矩形反射极片分别与感应电极ⅰ的m个测头对应相连,m个矩形反射极片也分别与感应电极ⅱ的m个测头对应相连;接收电极具有m个矩形接收极片,m个矩形接收极片分别与m个矩形反射极片正对;每个矩形反射极片沿测量方向的长度等于4w1*m3与4w2*m4中的较大值。
11.在工作状态下,动尺相对于定尺ⅰ、定尺ⅱ平行移动,先对a2、b2、c2、d2激励电极组施加相位依次相差90
°
的四路同频等幅正弦激励信号,此时激励电极ⅰ不工作,经电场耦合作用,m个矩形接收极片输出幅值相等、频率相同、相位依次相差的m路行波信号,该m路行波信号经处理后获得第一路位移信号u
o1
,并存储此测量结果;然后迅速将四路同频等幅正弦激励信号切换到a1、b1、c1、d1激励电极组上,此时激励电极ⅱ不工作,m个矩形接收极片输出幅值相等、频率相同、相位依次相差的m路行波信号,该m路行波信号经处理后获得第二
路位移信号u
o2
,对u
o2
进行处理得到精测直线位移值;对u
o2
与u
o1
进行对极定位处理,得到粗测对极位置值,将精测直线位移值与粗测对极位置值相结合得到绝对直线位移值。
12.优选的,上述两种传感器中感应极片ⅰ、感应极片ⅱ的形状有三种结构形式:
13.第一种,所述感应极片ⅰ的形状为区间或者区间的两条相同的半周期余弦曲线段在起止点与两条沿测量方向的长度为的直线段围成的封闭图形ⅰ,其中,该余弦曲线的周期t1=4w1。所述感应极片ⅱ的形状为区间或者区间的两条相同的半周期余弦曲线段在起止点与两条沿测量方向的长度为的直线段围成的封闭图形ⅱ,其中,该余弦曲线的周期t2=4w2。
14.第二种,所述感应极片ⅰ的形状为矩形或者平行四边形,该平行四边形由两条相同的斜线段在起止点与两条沿测量方向的长度为的直线段围成,该斜线段沿测量方向的长度为2w1。所述感应极片ⅱ的形状为矩形或者平行四边形,该平行四边形由两条相同的斜线段在起止点与两条沿测量方向的长度为的直线段围成,该斜线段沿测量方向的长度为2w2。
15.第三种,所述感应极片ⅰ的形状为[0,π]区间的两条幅值相等、相位相反的半周期正弦曲线段所围成的封闭图形ⅰ,该正弦曲线段的周期等于所述感应极片ⅱ的形状为[0,π]区间的两条幅值相等、相位相反的半周期正弦曲线段所围成的封闭图形ⅱ,该正弦曲线段的周期等于
[0016]
本发明具有如下效果:
[0017]
(1)将激励电极ⅰ、ⅱ设在定尺ⅰ的基体上表面,将接收电极ⅰ、ⅱ(或者接收电极)设在定尺ⅱ的基体下表面,定尺ⅰ、定尺ⅱ分别位于动尺的下方和上方,在工作状态下,减小了激励电极ⅰ、ⅱ与接收电极ⅰ、ⅱ(或者接收电极)间的信号干扰,提高了信号质量和可靠性,提高了信噪比,从而进一步提高了传感器的测量精度。
[0018]
(2)将激励电极ⅰ、ⅱ设在定尺ⅰ的基体上表面,将接收电极ⅰ、ⅱ(或者接收电极)设在定尺ⅱ的基体下表面,将感应电极ⅰ、ⅱ设在动尺的基体下表面,将反射电极ⅰ、ⅱ(或者反射电极)设在动尺的基体上表面,在基体尺寸不变的情况下,激励电极ⅰ、ⅱ,感应电极ⅰ、ⅱ,反射电极ⅰ、ⅱ(或者反射电极)和接收电极ⅰ、ⅱ(或者接收电极)的尺寸都可以制造的更大,提高了传感面的利用率,提高了信噪比,提升了传感器的测量精度。
附图说明
[0019]
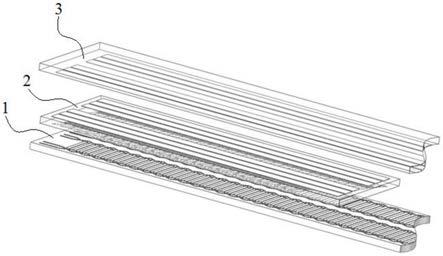
图1为实施例1中定尺ⅰ、动尺、定尺ⅱ的对应关系示意图。
[0020]
图2为实施例1中定尺ⅰ的俯视图。
[0021]
图3为实施例1中动尺的仰视图。
[0022]
图4为实施例1中动尺的俯视图。
[0023]
图5为实施例1中定尺ⅱ的仰视图。
[0024]
图6为实施例1中的信号处理原理框架图。
[0025]
图7为实施例2中定尺ⅰ、动尺、定尺ⅱ的对应关系示意图。
[0026]
图8为实施例2中动尺的仰视图。
[0027]
图9为实施例2中动尺的俯视图。
[0028]
图10为实施例2中定尺ⅱ的仰视图。
[0029]
图11为实施例2中的信号处理原理框架图。
具体实施方式
[0030]
实施例1:如图1至图6所示,本实施例中基于级联结构的绝对式时栅直线位移传感器,包括定尺ⅰ1、动尺2和定尺ⅱ3,定尺ⅰ1位于动尺2下方,定尺ⅰ1与动尺2正对平行安装并留有0.4mm间隙,定尺ⅱ3位于动尺2上方,定尺ⅱ3与动尺2正对平行安装并留有0.4mm间隙。
[0031]
如图1、图2所示,定尺ⅰ1的基体上表面并排设有激励电极ⅰ11、激励电极ⅱ12。
[0032]
激励电极ⅰ11由348个(即m1=87)大小相同、极距为w1=2.2988mm的矩形极片ⅰ沿测量方向等间距(该间距为1.1494mm)排列组成,每个矩形极片ⅰ沿测量方向的宽度为1.1494mm、沿垂直于测量方向的长度为10mm,每相邻的四个矩形极片ⅰ形成一个对极,总共有87个对极。n1依次取0至86的所有整数,第4n1+1号(即第1、5、9、...、345号)矩形极片ⅰ连成一组,组成a1激励电极组,第4n1+2号(即第2、6、10、...、346号)矩形极片ⅰ连成一组,组成b1激励电极组,第4n1+3号(即第3、7、11、...、347号)矩形极片ⅰ连成一组,组成c1激励电极组,第4n1+4号(即第4、8、12、...、348号)矩形极片ⅰ连成一组,组成d1激励电极组。
[0033]
激励电极ⅱ12由400个(即m2=100)大小相同、极距为w2=2mm的矩形极片ⅱ沿测量方向等间距(该间距为1mm)排列组成,每个矩形极片ⅱ沿测量方向的宽度为1mm、沿垂直于测量方向的长度为10mm,每相邻的四个矩形极片ⅱ形成一个对极,总共有100个对极。n2依次取0至99的所有整数,第4n2+1号(即第1、5、9、...、397号)矩形极片ⅱ连成一组,组成a2激励电极组,第4n2+2号(即第2、6、10、...、398号)矩形极片ⅱ连成一组,组成b2激励电极组,第4n2+3号(即第3、7、11、...、399号)矩形极片ⅱ连成一组,组成c2激励电极组,第4n2+4号(即第4、8、12、...、400号)矩形极片ⅱ连成一组,组成d2激励电极组。激励电极ⅱ12的起始端与激励电极ⅰ11的起始端对齐。
[0034]
如图1、图3所示,动尺2的基体下表面并排设有感应电极ⅰ21、感应电极ⅱ22,感应电极ⅰ21与激励电极ⅰ11正对,感应电极ⅱ22与激励电极ⅱ12正对,感应电极ⅰ21、感应电极ⅱ22都具有3个测头(即本实施例中m=3)。
[0035]
感应电极ⅰ21由30个(即m3=10)大小相同、极距为3.065mm的感应极片ⅰ沿测量方向等间距(该间距为1.5325mm)排列组成,感应极片ⅰ的形状为区间两条相同的半周期余弦曲线段在起止点与两条沿测量方向的长度为1.5325mm的直线段围成的封闭图形ⅰ(即斜余弦形),两条相同的半周期余弦曲线段的起始点之间的距离为1.5325mm、终止点之间的距离为1.5325mm;其中,该余弦曲线的周期t1=9.1952mm,感应极片ⅰ沿测量方向的宽度为1.5325mm、沿垂直于测量方向的长度为9mm。感应电极ⅰ21有10个对极,每相邻的三个感应极片ⅰ形成一个对极。n3依次取0至9的所有整数,第3n3+1号(即第1、4、7、...、28号)感应极片ⅰ连成一组,组成a1感应电极组,第3n3+2号(即第2、5、8、...、29号)感应极片ⅰ连成一组,组
成b1感应电极组,第3n3+3号(即第3、6、9、...、30号)感应极片ⅰ号连成一组,组成c1感应电极组。
[0036]
感应电极ⅱ22由30个(即m4=10)大小相同、极距为2.667mm的感应极片ⅱ沿测量方向等间距(该间距为1.3335mm)排列组成,感应极片ⅱ的形状为区间两条相同的半周期余弦曲线段在起止点与两条沿测量方向的长度为1.3335mm的直线段围成的封闭图形ⅱ(即斜余弦形),两条相同的半周期余弦曲线段的起始点之间的距离为1.3335mm、终止点之间的距离为1.3335mm;其中,该余弦曲线的周期t2=8mm,感应极片ⅱ沿测量方向的宽度为1.3335mm、沿垂直于测量方向的长度为9mm。感应电极ⅱ22有10个对极,每相邻的三个感应极片ⅱ形成一个对极。n4依次取0至9的所有整数,第3n4+1号(即第1、4、7、...、28号)感应极片ⅱ连成一组,组成a2感应电极组,第3n4+2号(即第2、5、8、...、29号)感应极片ⅱ连成一组,组成b2感应电极组,第3n4+3号(即第3、6、9、...、30号)感应极片ⅱ连成一组,组成c2感应电极组。
[0037]
如图1、图4所示,动尺2的基体上表面并排设有反射电极ⅰ、反射电极ⅱ。
[0038]
反射电极ⅰ具有3个矩形反射极片ⅰ,3个矩形反射极片ⅰ分别为并排的第一矩形反射极片23、第二矩形反射极片24、第三矩形反射极片25,第一矩形反射极片23、第二矩形反射极片24和第三矩形反射极片25,沿测量方向的长度都为91.952mm、沿垂直于测量方向的宽度都为3mm、沿垂直于测量方向的间距为0.5mm。第一矩形反射极片23与a1感应电极组相连,第二矩形反射极片24与b1感应电极组相连,第三矩形反射极片25与c1感应电极组相连。
[0039]
反射电极ⅱ具有3个矩形反射极片ⅱ,3个矩形反射极片ⅱ分别为并排的第四矩形反射极片26、第五矩形反射极片27、第六矩形反射极片28,第四矩形反射极片26、第五矩形反射极片27、第六矩形反射极片28,沿测量方向的长度都为91.952mm、沿垂直于测量方向的宽度都为3mm、沿垂直于测量方向的间距为0.5mm,第四矩形反射极片26与第三矩形反射极片25在垂直于测量方向的间距为5mm。第四矩形反射极片26与a2感应电极组相连,第五矩形反射极片27与b2感应电极组相连,第六矩形反射极片28与c2感应电极组相连。
[0040]
如图1、图5所示,定尺ⅱ3的基体下表面并排设有接收电极ⅰ、接收电极ⅱ。
[0041]
接收电极ⅰ具有3个矩形接收极片ⅰ,3个矩形接收极片ⅰ分别为并排的第一矩形接收极片31、第二矩形接收极片32、第三矩形接收极片33,第一矩形接收极片31、第二矩形接收极片32和第三矩形接收极片33,沿测量方向的长度都为800mm、沿垂直于测量方向的宽度都为3mm、沿垂直于测量方向的间距为0.5mm。第一矩形接收极片31与第一矩形反射极片23正对,第二矩形接收极片32与第二矩形反射极片24正对,第三矩形接收极片33与第三矩形反射极片25正对。
[0042]
接收电极ⅱ具有3个矩形接收极片ⅱ,3个矩形接收极片ⅱ分别为并排的第四矩形接收极片34、第五矩形接收极片35、第六矩形接收极片36,第四矩形接收极片34、第五矩形接收极片35、第六矩形接收极片36,沿测量方向的长度都为800mm、沿垂直于测量方向的宽度都为3mm、沿垂直于测量方向的间距为0.5mm,第四矩形接收极片34与第三矩形接收极片33在垂直于测量方向的间距为5mm。第四矩形接收极片34与第四矩形反射极片26正对,第五矩形接收极片35与第五矩形反射极片27正对,第六矩形接收极片36与第六矩形反射极片28正对。
[0043]
如图6所示,测量时(即在工作状态下),定尺ⅰ1、定尺ⅱ3保持不动,动尺2相对于定尺ⅰ1、定尺ⅱ3平行移动,对a1、b1、c1、d1激励电极组与a2、b2、c2、d2激励电极组同时施加相位依次相差90
°
的四路同频等幅正弦激励信号,激励信号经激励电极ⅰ11与感应电极ⅰ21以及激励电极ⅱ12与感应电极ⅱ22之间的耦合电场,在感应电极ⅰ21的a1、b1、c1感应电极组上产生三路同频等幅相位相差120
°
的行波信号,这三路行波信号经第一矩形反射极片23、第二矩形反射极片24和第三矩形反射极片25直接反射到第一矩形接收极片31、第二矩形接收极片32和第三矩形接收极片33上,在感应电极ⅱ22的a2、b2、c2感应电极组上产生三路同频等幅相位相差120
°
的行波信号,这三路行波信号经第四矩形反射极片26、第五矩形反射极片27、第六矩形反射极片28直接反射到第四矩形接收极片34、第五矩形接收极片35、第六矩形接收极片36上,在第一矩形接收极片31上输出第一行波信号,在第二矩形接收极片32上输出第二行波信号,在第三矩形接收极片33上输出第三行波信号,在第四矩形接收极片34上输出第四行波信号,在第五矩形接收极片35上输出第五行波信号,在第六矩形接收极片36上输出第六行波信号,第一、第二、第三行波信号经硬件电路处理成第一组三路方波信号后,输入fpga信号处理系统,经数据融合获得第一路位移信号u
o1
,第四、第五、第六行波信号经硬件电路处理成第二组三路方波信号后,输入fpga信号处理系统,经数据融合获得第二路位移信号u
o2
,对第二路位移信号u
o2
进行处理得到精测直线位移值;对第二路位移信号u
o2
与第一路位移信号u
o1
进行对极定位处理,得到粗测对极位置值,fpga信号处理系统将精测直线位移值与粗测对极位置值相结合得到绝对直线位移值。
[0044]
实施例2:如图7至图11所示,本实施例中基于级联结构的绝对式时栅直线位移传感器,其大部分结构与实施例1相同,不同之处在于:
[0045]
如图7、图8、图9所示,动尺2的基体上表面设有反射电极。反射电极具有3个矩形反射极片,3个矩形反射极片分别为并排的第一矩形反射极片23、第二矩形反射极片24、第三矩形反射极片25,第一矩形反射极片23、第二矩形反射极片24和第三矩形反射极片25,沿测量方向的长度都为91.952mm、沿垂直于测量方向的宽度都为7mm、沿垂直于测量方向的间距为0.5mm。第一矩形反射极片23与a1感应电极组、a2感应电极组相连,第二矩形反射极片24与b1感应电极组、b2感应电极组相连,第三矩形反射极片25与c1感应电极组、c2感应电极组相连。
[0046]
如图10所示,定子ⅱ3的基体下表面设有接收电极。接收电极具有3个矩形接收极片,3个矩形接收极片分别为并排的第一矩形接收极片31、第二矩形接收极片32、第三矩形接收极片33,第一矩形接收极片31、第二矩形接收极片32和第三矩形接收极片33,沿测量方向的长度都为800mm、沿垂直于测量方向的宽度都为7mm、沿垂直于测量方向的间距为0.5mm。第一矩形接收极片31与第一矩形反射极片23正对,第二矩形接收极片32与第二矩形反射极片24正对,第三矩形接收极片33与第三矩形反射极片25正对。
[0047]
如图11所示,测量时(即在工作状态下),定尺ⅰ1、定尺ⅱ3保持不动,动尺2相对于定尺ⅰ1、定尺ⅱ3平行移动,先对激励电极ⅱ12的a2、b2、c2、d2激励电极组分别施加相位依次相差90
°
的四路同频等幅正弦激励电信号,此时激励电极ⅰ11不工作,激励信号经激励电极ⅱ12与感应电极ⅱ22之间的耦合电场,在感应电极ⅱ22的a2、b2、c2感应电极组上产生三路同频等幅相位相差120
°
的行波信号,这三路行波信号经第一矩形反射极片23、第二矩形反射极片24、第三矩形反射极片25直接反射到第一矩形接收极片31、第二矩形接收极片32、第
三矩形接收极片33上,在第一矩形接收极片31上输出第一行波信号,在第二矩形接收极片32上输出第二行波信号,在第三矩形接收极片33上输出第三行波信号,第一、第二、第三行波信号经硬件电路处理成第一组三路方波信号后,输入fpga信号处理系统,经数据融合获得第一路位移信号u
o1
,并存储此测量结果。
[0048]
然后在1ms内将前述相位依次相差90
°
的四路同频等幅正弦激励电信号切换到激励电极ⅰ11的a1、b1、c1、d1激励电极组上,此时激励电极ⅱ12不工作,激励信号经激励电极ⅰ11与感应电极ⅰ21之间的耦合电场,在感应电极ⅰ21的a1、b1、c1感应电极组上产生三路同频等幅相位相差120
°
的行波信号,这三路行波信号经第一矩形反射极片23、第二矩形反射极片24和第三矩形反射极片25直接反射到第一矩形接收极片31、第二矩形接收极片32和第三矩形接收极片33上,在第一矩形接收极片31上输出第四行波信号,第二矩形接收极片32上输出第五行波信号,在第三矩形接收极片33上输出第六行波信号,第四、第五、第六行波信号经硬件电路处理成第二组三路方波信号后,输入fpga信号处理系统,经数据融合获得第二路位移信号u
o2
,对第二路位移信号u
o2
进行处理得到精测直线位移值;对第二路位移信号u
o2
与第一路位移信号u
o1
进行对极定位处理,得到粗测对极位置值,fpga信号处理系统将精测直线位移值与粗测对极位置值相结合得到绝对直线位移值。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1