一种光纤光栅海底振动信号测量系统
1.本发明属于光纤光栅传感监测技术领域,具体涉及一种光纤光栅海底振动信号测量系统。
背景技术:
2.光纤光栅海底振动信号测量传感器是一种建立在光纤传感技术、光电子技术基础上的水下地震监测系统,具有灵敏度高、抗电磁干扰、抗辐射、可实现水下无源探测的优点,是海底节点观测仪发展的重要方向,在军事领域有着重要作用。
3.目前,海底节点观测仪外框构架多数采用电传感器作为传感单元,相比于光纤光栅传感器更易受干扰。现流行的海底节点观测仪外框构架具有多数体型较大,内部走线复杂问题。
技术实现要素:
4.本发明要解决的技术问题是:提供一种光纤光栅海底振动信号测量系统,用于在海洋环境下减小测量误差、提高工作效率。
5.本发明为解决上述技术问题所采取的技术方案为:一种光纤光栅海底振动信号测量系统,包括外框构架、密封门、加速度传感器、光纤陀螺仪、解调仪、热电转换装置、锂电池组;外框构架包括上层腔体和下层腔体;下层为锂电池组安装腔体,用于定位并安装锂电池组;锂电池组的电源输出端连接解调仪的电源输入端用于为解调仪供电;上层腔体从左至右依次包括光纤光栅传感器安装腔体、热电转换装置安装腔体和解调仪安装腔体;光纤光栅传感器安装腔体的外侧边缘不与外框构架的内壁接触用于防止出现干扰和误差,光纤光栅传感器安装腔体的内部为阶梯状腔体用于上下定位并安装加速度传感器,光纤光栅传感器安装腔体的右边缘设有第一螺纹孔用于通过螺纹对加速度传感器进行左右定位;光纤光栅传感器安装腔体的腔体开口前侧设有第三螺纹孔用于安装光纤陀螺仪,使光纤陀螺仪与加速度传感器平行固定;光纤陀螺仪用于实时测量系统的姿态角,并根据姿态角利用算法将加速度传感器确定的第一坐标系矫正到大地坐标系;热电转换装置腔体设于上层腔体的中线偏右侧,热电转换装置安装腔体的内部为阶梯状腔体用于定位并安装热电转换装置,热电转换装置安装腔体的左边缘设有第二螺纹孔用于通过螺纹对热电转换装置进行左右定位,热电转换装置安装腔体的后边缘紧贴外框构架的内壁;热电转换装置安装腔体的外侧右边缘为解调仪安装腔体的左边界,解调仪安装腔体用于定位并安装解调仪,热电转换装置贴紧解调仪安装用于充分吸收解调仪的热量;解调仪的第一通道和第二通道分别用跳线连接加速度传感器的尾纤和光纤陀螺仪的尾纤,用于分别解调加速度传感器的信号和光纤陀螺仪的光信号并储存测量数据。
6.按上述方案,密封门与外框构架采取螺纹连接,设有八个螺纹连接处;外框构架与密封门的密封处设有卡槽,用于涂抹密封胶;外框构架采用不锈钢材质。
7.按上述方案,还包括夹板用于分隔上层腔体和下层腔体,夹板的中部设有凹槽,凹
槽贯穿夹板用于连通锂电池组与解调仪的供电线路;锂电池组的电源插口对准凹槽。
8.按上述方案,加速度传感器包括x向加速度传感单元、y向加速度传感单元和z向加速度传感单元;设x、y、z为三个相互垂直的方向,则在低频环境下,z向加速度传感单元用于测量z轴方向的振动信号,y向加速度传感单元用于测量y轴方向的振动信号,x向加速度传感单元用于测量x轴方向的振动信号;x向加速度传感单元、y向加速度传感单元和z向加速度传感单元分别包括相同结构的金属传感芯体和不同波长的fbg光纤布拉格光栅;金属传感芯体为柔性双绞链式结构,包括依次连接的基座、双绞链结构和芯体质量块,基座上设有螺纹孔;fbg光纤布拉格光栅按金属传感芯体的长度方向固定在金属传感芯体上;光纤光栅陀螺仪敏感的三轴方向分别与低频fbg三维加速度传感器敏感的三轴方向平行,光纤光栅陀螺仪用于实时测量整个装置的姿态角,并根据姿态角用算法将低频fbg三维加速度传感器确定的第一坐标系矫正到大地坐标系;低频fbg三维加速度传感器和光纤光栅陀螺仪分别通过各自的尾纤连接解调仪的不同输入通道的跳线,解调仪用于分别解调低频fbg三维加速度传感器的信号和光纤光栅陀螺仪的光信号并储存测量数据。
9.进一步的,金属传感芯体包括相同结构的z向金属传感芯体、y向金属传感芯体和x向金属传感芯体;fbg光纤布拉格光栅包括不同波长的fbg1第一光纤布拉格光栅、fbg2第二光纤布拉格光栅、fbg3第三光纤布拉格光栅;x向加速度传感单元包括x向金属传感芯体和固定在x向金属传感芯体上的fbg3第三光纤布拉格光栅;y向加速度传感单元包括y向金属传感芯体和固定在y向金属传感芯体上的fbg2第二光纤布拉格光栅;z向加速度传感单元包括z向金属传感芯体和固定在z向金属传感芯体上的fbg1第一光纤布拉格光栅;fbg光纤布拉格光栅在固定的过程中使栅区悬空不与金属传感芯体接触,并给光纤足够的预拉伸;z向金属传感芯体与x向金属传感芯体位于同一平面且相互垂直;y向金属传感芯体与z向金属传感芯体、x向金属传感芯体所在平面垂直;z向金属传感芯体、y向金属传感芯体和x向金属传感芯体两两相互垂直,构成空间三维坐标系,设为第一坐标系;fbg1第一光纤布拉格光栅、fbg2第二光纤布拉格光栅、fbg3第三光纤布拉格光栅的尾纤依次连接,fbg3第三光纤布拉格光栅的尾纤连接解调仪。
10.按上述方案,包括teg热电模块、升压储存模块和稳压输出模块;teg热电模块安装在海底地震仪的内部,用于采集热电能量;teg热电模块的能量输出端连接升压储存模块的电源输入端,用于将采集到的热电能量传输给升压储存模块;teg热电模块包括n型掺杂半导体芯片、p型掺杂半导体芯片、金属片、第一导热陶瓷板、第二导热陶瓷板;第一导热陶瓷板和第二导热陶瓷板的表面分别金属化,n型掺杂半导体芯片、金属片与p型掺杂半导体芯片依次夹在第一导热陶瓷板与第二导热陶瓷板之间,n型掺杂半导体芯片与p型掺杂半导体芯片之间通过金属片串联,第一导热陶瓷板和第二导热陶瓷板的外侧分别通过引线引出用于输出电能;升压储存模块的电源输出端连接稳压输出模块的电源输入端,升压储存模块用于将超低压、低功率的电能升压、储存并传输给稳压输出模块;稳压输出模块的电源输出端连接待充电设备的电源输入端,稳压输出模块用于将电能稳定传输给待充电设备。
11.进一步的,升压储存模块包括能量采集芯片、第一电容c1、第二电容csc、第三电容chvr、第四电容cref、第五电容cbyp、第六电容cstor、第一电感lbst、第一电阻rok1、第二电阻rok2、第三电阻rok3、第四电阻roc1、第五电阻roc2、第六电阻rov1、第七电阻rov2、第八电阻ruv1、第九电阻ruv2;能量采集芯片的vstor引脚通过串联第五电容cbyp接地,第六电
容cstor并联在第五电容cbyp的两端;第一电感lbst的一端连接能量采集芯片的lbst引脚,另一端分别连接teg热电模块的能量输出端和第三电容chvr的一端,第三电容chvr的另一端接地;第五电阻roc2并联在能量采集芯片的vin-dc引脚与voc-samp引脚之间,能量采集芯片的vin-dc引脚连接teg热电模块的能量输出端;第四电阻roc1的一端连接能量采集芯片的voc-samp引脚,另一端接地;第四电容cref的一端连接能量采集芯片的vref-samp引脚,另一端接地;能量采集芯片的vss引脚接地;第七电阻rov2并联在能量采集芯片的vbat-ov引脚与vrdiv引脚之间;第六电阻rov1的一端连接能量采集芯片的vbat-ov引脚,另一端接地;第九电阻ruv2并联在能量采集芯片的vbat-uv引脚与vrdiv引脚之间;第八电阻ruv1的一端连接能量采集芯片的vbat-uv引脚,另一端接地;第一电阻rok1并联在能量采集芯片的avss引脚与ok-prog引脚之间,能量采集芯片的avss引脚与vss引脚分别接地;第二电阻rok2并联在能量采集芯片的ok-hyst引脚与ok-prog引脚之间;第三电阻rok3并联在能量采集芯片的vrdiv引脚与ok-hyst引脚之间;第一电容c1的一端连接能量采集芯片的ybat引脚,另一端接地;第二电容csc的正极连接能量采集芯片的ybat引脚,负极接地。
12.进一步的,稳压输出模块包括稳压芯片、第二电感l1、第七电容c2;稳压芯片的vin引脚分别连接稳压芯片的en引脚和能量采集芯片的ybat引脚;稳压芯片的fb引脚分别连接稳压芯片的vout引脚和待充电设备的电源输入端;第七电容c2的一端连接稳压芯片的vout引脚,另一端接地;第二电感l1并联在稳压芯片的en引脚与l引脚之间;稳压芯片的gnd引脚接地。
13.本发明的有益效果为:
14.1.本发明的一种光纤光栅海底振动信号测量系统,通过采用阶梯型定位方式,有效减小了测量误差,结构简单,体积小,成本低,安装方便,易于制造,可重复使用,有利于提高工作效率;本发明的外框构架采用上下双层结构,充分利用了框架内容积,有效减小了系统的整体尺寸;本发明的外框构架采用卡槽密封方式,密封效果好,适用于海洋环境。
15.2.本发明采用低频fbg三维加速度传感器测量海底振动信号,利用光纤光栅陀螺仪矫正低频fbg三维加速度传感器的测量方向,实现了在复杂场合准确采集振动信号并通过远距离传输振动信号的功能。
16.3.本发明通过在装置温差大的底盘或者部件中安装teg热电模块,使得装置内外部的温差通过teg热电模块转换为电源,并利用高效的能量收集电路以及升压降压模块转换为适用于光纤无线传感网络的电源之后给相关部件进行供电,实现了采集并利用光纤无线传感网络工作时散发的热能,提高设备的续航能力的功能。
附图说明
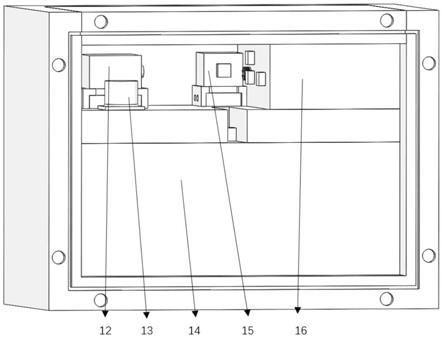
17.图1是本发明实施例的装配图。
18.图2是本发明实施例的密封门的立体图。
19.图3是本发明实施例的外框构架的立体图。
20.图4是本发明实施例的加速度传感器的结构图。
21.图5是本发明实施例的金属传感芯体的结构图。
22.图6是本发明实施例的热电转换装置的原理框图。
23.图7是本发明实施例的热电转换装置的电路图。
24.图中:1.锂电池组安装腔体;2.夹板;3.凹槽;4.光纤光栅传感器安装腔体;5.第一螺纹孔;6.热电转换装置安装腔体;7.第二螺纹孔;8.解调仪安装腔体;9.卡槽;10.螺纹连接处;11.第三螺纹孔;12.加速度传感器;13.光纤陀螺仪;14.锂电池组;15.热电转换装置;16.解调仪。
具体实施方式
25.下面结合附图和具体实施方式对本发明作进一步详细的说明。
26.参见图1和图2,本发明的实施例包括外框构架、密封门、加速度传感器12、光纤陀螺仪13、解调仪16、热电转换装置15、锂电池组14;密封门与外框构架采取螺纹连接,设有八个螺纹连接处10;外框构架与密封门的密封处设有卡槽9,安装时在卡槽9处涂抹密封胶即可完成密封,密封简单有效。外框构架整体采用不锈钢材质,成本低廉。
27.参见图3,外框构架内部包括上层和下层,上层和下层之间设有夹板2,夹板2的中部设有凹槽3,凹槽3贯穿夹板2用于锂电池组14与解调仪16接通线路通电;下层为锂电池组安装腔体1,用于安装锂电池组14使系统重心朝下并初步限制方位,锂电池组14通过外框构架定位,电源插口对凹槽3。锂电池组14的电源输出端连接解调仪16的电源输入端,用于为解调仪16供电,使系统至少在海底连续工作一个月。
28.上层从左至右依次包括光纤光栅传感器安装腔体4、热电转换装置安装腔体6和解调仪安装腔体8。
29.光纤光栅传感器安装腔体4设置于上层的左上角且四周不与外框构架接触用于防止出现干扰和误差,光纤光栅传感器安装腔体4为阶梯状腔体用于安装加速度传感器12并进行上下定位,光纤光栅传感器安装腔体4的右边缘设有第一螺纹孔5用于通过螺纹进行加速度传感器12的左右定位。
30.参见图4,加速度传感器12为包括x向加速度传感单元、y向加速度传感单元、z向加速度传感单元的三个独立传感单元的组合;x向加速度传感单元、y向加速度传感单元、z向加速度传感单元分别用于在低频环境下对应测量x、y、z三个相互垂直方向的振动信号,分别包括相同结构的金属传感芯体和不同波长的fbg光纤布拉格光栅;金属传感芯体用于固定fbg光纤布拉格光栅并预留合适长度的尾纤。
31.金属传感芯体包括相同结构的z向金属传感芯体22、y向金属传感芯体25和x向金属传感芯体27。参见图5,金属传感芯体为柔性双绞链式结构,包括依次连接的基座222、双绞链结构223和芯体质量块224,且基座222上设有螺纹孔221;x向金属传感芯体27和z向传感金属芯体22留有螺纹孔221的一端为45度斜角。
32.铰链结构是悬臂梁的一种演变结构,只对一个方向的振动敏感;z向金属传感芯体22与x向金属传感芯体27位于同一平面且相互垂直;y向金属传感芯体25与z向金属传感芯体22、x向金属传感芯体27所在平面垂直;z向金属传感芯体22、y向金属传感芯体25和x向金属传感芯体27两两相互垂直,构成空间三维坐标系,设为第一坐标系;z向金属传感芯体22用于测量z轴方向的振动信号,y向金属传感芯体25用于测量y轴方向的振动信号,x向金属传感芯体27用于测量x轴方向的振动信号。
33.fbg光纤布拉格光栅包括不同波长的fbg1第一光纤布拉格光栅23、fbg2第二光纤布拉格光栅24、fbg3第三光纤布拉格光栅26,用焊接机分别配置焊接固定在z向金属传感芯
体22、y向金属传感芯体25和x向金属传感芯体27上;固定fbg光纤布拉格光栅的时候,使栅区悬空不与金属传感芯体接触,并给光纤足够的预拉伸;按照z向金属传感芯体22、y向金属传感芯体25和x向金属传感芯体27的顺序将fbg1第一光纤布拉格光栅23、fbg2第二光纤布拉格光栅24、fbg3第三光纤布拉格光栅26的尾纤依次用熔接机焊接起来,并预留fbg3第三光纤布拉格光栅26的尾纤用于与解调仪16连接。
34.加速度传感器12还包括底座21,底座21设有与金属传感芯体匹配的内螺纹,用于通过螺栓固定金属传感芯体。
35.光纤光栅传感器安装腔体4的前侧设有四个第三螺纹孔11用于安装光纤陀螺仪13。光纤陀螺仪13与加速度传感器12平行固定,用于实时测量整个装置的姿态角,并根据姿态角利用算法将加速度传感器12确定的第一坐标系矫正到大地坐标系。
36.光纤光栅传感器安装腔体4的右侧为热电转换装置安装腔体6,热电转换装置腔体6设置于上层的中部偏右,热电转换装置安装腔体6为阶梯状腔体用于安装热电转换装置15,热电转换装置安装腔体6的左边缘设有第二螺纹孔7用于螺纹定位、后边缘贴近接触外框构架、右边缘为解调仪安装腔体8的边界。
37.参见图6,热电转换装置15包括进行热电能量采集的teg热电模块和将超低压、低功率电能进行利用的升压储存模块以及将电能稳定输出的稳压输出模块。teg热电模块安装在温度较高、温差较大的海底地震仪的内部;teg热电模块与升压储存模块的电源输入端连接,升压储存模块的电源输出端与稳压输出模块的电源输入端连接,稳压输出模块的电源输出端与待充电设备连接。待充电装置包括充电电池模组、解调仪、控制器。
38.teg热电模块采用的是基于碲化铋的热电材料,由热电材料、铜片、金属化的陶瓷片和引线组成。teg热电模块采用的电串联连接并且夹在两块导热陶瓷板的n型掺杂半导体芯片和p型掺杂半导体芯片构成,本实例中采用的teg热电模块1的半导体材料为bi2te3。
39.参见图7,升压储存模块包括能量采集芯片、电容c1、电容csc、电容chvr、电容cref、电容cbyp、电容cstor、电感lbst、电阻rok1、电阻rok2、电阻rok3、电阻roc1、电阻roc2、电阻rov1、电阻rov2、电阻ruv1、电阻ruv2。电能采集芯片的vstor引脚与并联的两个电容cbyp、cstor相连接后连接接地端;电能采集芯片的lbst引脚与电感lbst连接后与热电模块teg的电压输出端口电性连接,同时热电模块teg的电压输出端口与电容chvr连接后与接地端连接;电能采集芯片的vin-dc引脚和voc-samp引脚连接在电阻roc2两端后与热电模块teg连接;电阻roc1与电阻roc2串联后与接地端连接;电能采集芯片的vref-samp引脚与电容cref连接后接地;电能采集芯片的vss引脚接地;电能采集芯片的vbat-ov引脚与vrdiv引脚连接在电阻rov2的两端;电阻rov2与电阻rov1串联后与接地端连接;电能采集芯片的vbat-uv与vrdiv引脚连接在电阻ruv2的两端;电阻ruv2与电阻ruv1串联后与接地端连接;电能采集芯片的avss引脚与ok-prog引脚连接在电阻rok1两端;电能采集芯片的ok-hyst引脚与ok-prog引脚连接在电阻rok2两端;电能采集芯片的vrdiv引脚与ok-hyst引脚连接在电阻rok3两端;电阻rok1、电阻rok2、电阻rok3串联后与接地端连接;电能采集芯片的avss引脚与接地端连接;电能采集芯片的ybat引脚与电容csc、电容c1连接。
40.升压储存模块采用电能采集芯片,通过低至300mv的电压启动,对低至130mv的低压输入源进行持续的能量收集。储存元件采用超级电容器。
41.参见图7,稳压输出模块包括稳压芯片、电感l1、电容c2。稳压芯片的vin引脚与电
容c1连接并与升压储存模块的输出端连接;稳压芯片的fb引脚与vout引脚连接并与电容c2连接后与接地端连接,同时与外接设备wsn连接;稳压芯片的en引脚与电感l1连接后与l引脚连接并与升压储存模块的输出端连接。
42.稳压输出模块与海底地震仪的电池装置相连接。
43.稳压输出模块采用稳压芯片,将0.7v~5.5v的电压稳定到3.0v~3.5v输出,满足光纤无线传感网络模块的供电要求。
44.上层的最右侧为解调仪安装腔体8用于安装解调仪16,解调仪安装腔体8通过外框构架的内边界和热电转换装置安装腔体6对解调仪16进行定位,热电转换装置15贴紧解调仪16安装,用于充分吸收热量。
45.解调仪16的通道一和通道二分别用跳线连接加速度传感器12的尾纤和光纤陀螺仪13的尾纤,用于分别解调加速度传感器12的信号和光纤陀螺仪13的光信号,并储存测量数据。
46.各个部件安装腔体相对位置一一对应,各线路接口处于最近距离,线路简单。
47.装配系统的具体步骤为:
48.s1:加工外框构架;
49.s2:将热电转换装置15装入热电转换装置安装腔体6,同时在第二螺纹孔7处通过螺钉定位热电转换装置15;
50.s3:将解调仪16装入解调仪安装腔体8,调整第二螺纹孔7的螺钉使热电转换装置15紧贴解调仪16,用于有效吸收热量;
51.s4:用电源线连接热电转换装置15与解调仪16;
52.s5:将锂电池组14装入锂电池组安装腔体1,使用电源线连接锂电池组14与解调仪16;
53.s6:将加速度传感器12装入光纤光栅传感器安装腔体4,使用跳线连接加速度传感器12与解调仪16;
54.s7:将光纤陀螺仪13安装在第三螺纹孔11处,使用跳线连接陀螺仪13与解调仪16;
55.s8:装置所有的螺纹配合用螺纹胶固定;光纤熔接处采用热缩管保护;固定光纤光栅的胶水采用环氧树脂胶;在密封门卡槽9处涂抹密封胶后安装密封门。
56.以上实施例仅用于说明本发明的设计思想和特点,其目的在于使本领域内的技术人员能够了解本发明的内容并据以实施,本发明的保护范围不限于上述实施例。所以,凡依据本发明所揭示的原理、设计思路所作的等同变化或修饰,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1