用于模拟和监测海缆变形和振动的实验台架和实验方法
1.本发明涉及海缆变形监测技术,特别涉及一种用于模拟和监测海缆变形和振动的实验台架和实验方法。
背景技术:
2.随着海洋观测技术的发展,海底观测网、作业型rov等应用广泛,海洋输电技术也进一步成熟。海底观测网需要缆进行电能和信号传输,rov需要脐带缆与母船进行通讯,海底电缆需要保证输电的安全性和稳定性。这些缆系应用在各自的应用环境中起到了至关重要的作用,但是又都在复杂恶劣的环境下工作,存在一定的安全隐患。
3.水下缆系物体的监测与陆地上的不同,一方面无法直接用肉眼观察其缠绕、绷直受力等具体状态。另一方面,海底电缆、浮式风机的漂浮缆和半潜式平台的锚系缆等需要长期工作,其状态与作业的安全性密切相关。因此,目前已有基于光纤光栅传感器、mems传感器等技术原理的缆系原位在线监测系统被陆续研发出来。
4.在投入实际生产和使用之前,需要对于缆系的响应速度、振动情况等动态指标进行测试,以便为生产设计和实海安装应用提供技术参考。基于光纤光栅传感器、mems传感器等技术原理的标定和监测技术和评价能力,基本上只能局限于相对位置误差、分辨率等静态指标。目前仍缺乏能够实现动态指标测试的实验平台。
技术实现要素:
5.本发明要解决的技术问题是,克服现有技术中存在的不足,提供一种用于模拟和监测海缆变形和振动的实验台架,可用于实现缆状物体的x-y方向和x-z方向上的变形和振动,并记录对应位置的位移量。
6.为解决技术问题,本发明的解决方案如下:
7.提供一种用于模拟和监测海缆变形和振动的实验台架,包括:环境模拟系统,包括断面水槽和造波机,断面水槽用于加注海水以模拟海洋环境;台架支撑系统,包括安置在断面水槽中的支撑架,以及设于支撑架上方的长条形台面;在台面上沿其长度方向间隔布置若干条相互平行的贯通开槽,开槽垂直于台面的长度方向,台面用于放置拟测试的海缆;运动模拟系统,包括设于所述开槽下方的多组驱动装置,各驱动装置均包括固定在支撑架上的水下电机,水下电机通过减速器和传动齿轮连接丝杠机构;在丝杠机构上竖向布置套环固定杆,其顶端的套环穿过台面开槽后露出于台面上方,所述海缆穿过各套环后放置于台面上;扫描监测系统,包括设于断面水槽上方的至少一组三维激光扫描仪,以及设于海缆上的光纤光栅传感器或mems传感器;上位的工控机,通过信号线与运动模拟系统相连。
8.作为本发明的优选方案,所述运动模拟系统包括电机通讯板,电机通讯板上设有电源模块、rs232模块、usb-232转换器和多个rs485模块;电源模块通过线缆与各水下电机相连实现供电,每个rs485模块通过信号线连接一台水下电机用于传递控制信号;rs232模块通过usb-232转换器连接至所述上位的工控机,用于接收工控机的控制命令和上传各电
机的运行数据。
9.作为本发明的优选方案,所述造波机设于断面水槽的端部,包括上位机、运动控制器、功率驱动设备、伺服电机、机械执行机构和传感器。
10.作为本发明的优选方案,台面上的开槽为等间距布置。
11.作为本发明的优选方案,所述丝杠机构包括水平丝杠和竖向丝杠,丝杠之间、丝杠与套环固定杆之间通过滑台连接,用于实现套环固定杆在水平方向和竖直方向上的位移。
12.作为本发明的优选方案,所述扫描监测系统还包括一个上位的上位机,该上位机通过信号线连接所述三维激光扫描仪;或者,所述三维激光扫描仪直接通过信号线连接至与运动模拟系统相连的工控机。
13.本发明进一步提供了利用前述实验台架模拟和监测海缆变形和振动的实验方法,包括:
14.(1)将拟测试的海缆穿过各套环后放置于台面上,然后向断面水槽中加注海水,并加入常见附着型海洋生物或微生物;使海水淹没台面至少50cm,以模拟实海场景;
15.(2)使海缆保持一定时间的静止状态,观察海缆表面的生物附着和铠装结构变化;
16.(3)启动造波机并控制水位,模拟原位波浪和潮流环境,观察不同频率谱波浪和潮汐对海缆本体和所处位置产生的影响;
17.(4)启动水下电机改变海缆固定点的相对位置使其处于受力状态,持续一段时间;利用传统监测装置对海缆结构破坏情况进行监测;
18.(5)使水下电机进行周期性往复运动,观察单源低频振动、多源低频振动和振动叠加的情况下对海缆结构的影响;
19.(6)根据设计的测试方案,重复步骤(2)-(5)或调整各步骤的顺序,获得不同实海场景条件对海缆造成的影响;在测试过程中,始终利用三维激光扫描仪对海缆与参考点之间的相对位置进行测量,并将测量结果与各光纤光栅传感器、mems传感器和水下电机的运动数据进行比对,以提高监测数据的准确性。
20.发明原理描述:
21.本发明中,将海水没过整个台架,利用造波机制造的波浪模拟海浪环境,可以观察缆本体和相对位置的变化;将三维激光扫描仪的扫描结果和水下电机运行数据相比较,可以在三维空间上评价实验系统的精度和分辨率。
22.启动多台电机分别在x-y平面和x-z平面上进行运动,使其发生进行往复运动,可以观察海缆的变化和监测系统的动态响应速度。进一步比较激光扫描结果和电机数据监测结果的对应点位置误差,分析海缆在高动态环境下的监测的准确性。对于振动监测而言,可以先启动一台电机进行周期性往复运动,对比设置的运动周期和监测结果。再启动不同方向上的多台电机周期运动,在振动叠加的情况下分析结果并判断实验装置的有效性和可靠性。
23.关闭电机,使被测海缆长期(几个月以上)保持在一个非受力的正常状态,可以分析模拟海洋环境下海缆结构的稳定性,同时判断实验系统长期原位使用的可行性和数据变化。也可以启动电机,改变相对位置使海缆保持在一个弯曲受力状态,分析比较非自然状态下缆使用寿命变化。
24.与现有技术相比,本发明的有益效果为:
25.(1)本发明的实验台架,能够利用造波机和海水近似模拟系固状态下,海洋缆系物体的在原位相似环境中结构的变化。
26.(2)本发明创新性地提出了使用伺服电机及传动机构使缆上对应点的位置发生变化,观察位移对其结构稳定性的影响;此外伺服电机可以在控制下进行往复运动,从而可以实现缆不同位置的低频振动的模拟。
27.(3)本发明中,可以将传统的监测装置(光纤光栅传感器、mems传感器等)布放于试验缆上进行静态测试。可在模拟台架上长期布放监测系统模拟原位长期工作环境,实现全方位的性能评价。
28.(4)本发明还能通过波浪或者伺服电机改变相应位置,同时利用三维激光扫描仪扫描测试缆的形状与监测结果和电机运动参数进行对比。通过多个伺服电机同时改变缆在空间上的相对位置进行动态测试,观察监测系统的响应速度。
附图说明
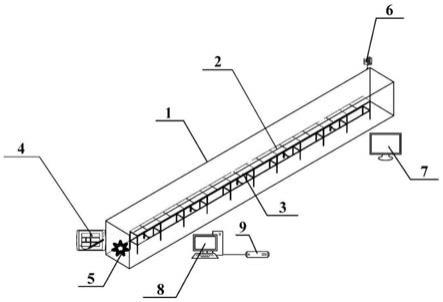
29.图1为本发明的整体示意图;
30.图2为本发明台架单元的示意图;
31.图3为本发明台架单元的截面图;
32.图4为本发明台架运动机构的示意图;
33.图5为本发明的水下电机的截面图。
34.图中的附图标记:1-断面水槽;2-海缆;3-台面;4-造波机控制面板;5-造波机;6-三维激光扫描仪;7-上位机;8-工控机;9-电机通讯板;10-水密连接缆;11-丝杠机构;12-支撑架;13-套环固定杆;14-水下电机;15-滑块;16-伺服电机;17-电机控制板,18-防水外壳。
具体实施方式
35.下面结合附图和具体实施对本发明作进一步详细说明。
36.如图1-5所示,本发明所述的用于模拟和监测海缆变形和振动的实验台架,包括:环境模拟系统、台架支撑系统、运动模拟系统和上位的工控机8,工控机8通过信号线与运动模拟系统相连。其中,
37.环境模拟系统,包括断面水槽1和造波机5,断面水槽1用于加注海水以模拟海洋环境;造波机5设于断面水槽1的端部,具体还进一步包括自带的上位机、运动控制器、功率驱动设备、伺服电机、机械执行机构和传感器等部件。
38.台架支撑系统,包括安置在断面水槽1中的支撑架12,以及设于支撑架12上方的长条形台面3;在台面3上沿其长度方向等间距布置若干条相互平行的贯通开槽,开槽垂直于台面3的长度方向,台面3用于放置拟测试的海缆;
39.运动模拟系统,包括设于开槽下方的多组驱动装置,各驱动装置均包括固定在支撑架12上的水下电机14,水下电机14通过减速器和传动齿轮连接丝杠机构11;在丝杠机构11上竖向布置套环固定杆13,其顶端的套环穿过台面3的开槽后露出于台面3上方,海缆2穿过各套环后放置于台面3上;丝杠机构11包括水平丝杠和竖向丝杠,丝杠之间、丝杠与套环固定杆13之间通过滑台连接,用于实现套环固定杆13在水平方向和竖直方向上的位移。运动模拟系统还包括电机通讯板9,电机通讯板9上设有电源模块、rs232模块、usb-232转换器
和多个rs485模块;电源模块通过线缆与各水下电机14相连实现供电,每个rs485模块通过信号线连接一台水下电机14用于传递控制信号;rs232模块通过usb-232转换器连接至工控机8,用于接收工控机8的控制命令和上传各电机的运行数据。
40.扫描监测系统,包括设于断面水槽上方的至少一组三维激光扫描仪6,以及设于海缆2上的光纤光栅传感器或mems传感器(图中未显示);扫描监测系统可以单独设置一台上位的上位机7用于图像显示和数据存储,该上位机7通过信号线连接三维激光扫描仪6。或者,可以将三维激光扫描仪6直接通过信号线连接至与运动模拟系统相连的工控机8,以节约设备成本。
41.本发明中,利用该实验台架模拟和监测海缆变形和振动的实验方法,包括以下内容:
42.(1)将拟测试的海缆2穿过各套环后放置于台面3上,然后向断面水槽1中加注海水,并加入常见附着型海洋生物或微生物;使海水淹没台面3至少50cm,以模拟实海场景;
43.(2)使海缆2保持一定时间的静止状态,观察海缆2表面的生物附着和铠装结构变化;
44.(3)启动造波机5并控制水位,模拟原位波浪和潮流环境,观察不同频率谱波浪和潮汐对海缆本体和所处位置产生的影响;
45.(4)启动水下电机14改变海缆2固定点的相对位置使其处于受力状态,持续一段时间;利用布置在海缆上的传统监测装置(光纤光栅传感器或mems传感器等)对海缆结构破坏情况进行监测;
46.(5)使水下电机14进行周期性往复运动,观察单源低频振动、多源低频振动和振动叠加的情况下对海缆结构的影响;
47.(6)根据设计的测试方案,重复步骤(2)-(5)或调整各步骤的顺序,获得不同实海场景条件对海缆2造成的影响;在测试过程中,始终利用三维激光扫描仪6对海缆2与参考点之间的相对位置进行测量,并将测量结果与各光纤光栅传感器、mems传感器和水下电机14的运动数据进行比对,以提高监测数据的准确性。
48.更为详细的示例性描述具体如下:
49.扫描监测系统,主要包括三维激光扫描仪6以及带有相应数据处理和保存功能的上位机7。三维激光扫描仪6可选莱卡三维激光扫描仪(leica3d disto),可实现立体扫描和偏移测量,并在上位机7实现显示被测物体形状。扫描仪的测距范围为0.5-50米,测距精度为1毫米,带有自动整平功能,所需电压和功耗较小,可满足台架实验长时间工作的需要。
50.运动模拟系统示例性地包含10台水下电机14。在电机的驱动下,通过丝杠结构11使得海缆2分别在5个位置发生x-y方向和x-z方向上的位移。水下电机14内部采用正元伺服电机am-bl45100配合am-45p减速器,额定输出扭矩为120.8mnm,经过减速后最大连续转矩为8.82nm。伺服电机16和减速器由防水外壳18封装,且内置电机控制板17用于接收电源和控制信号。防水外壳18可使用铝合金6061材料,并进行表面氧化。传动齿轮和丝杠机构11使用不锈钢316材料,以保证在海水环境下长期工作的能力。
51.台架支撑系统包含10块长1.5米,宽1米的正方形台面3和高1米的支撑架12,在支撑架12上固定安装水下电机14和丝杠机构11等部件。台面3上的贯通开槽中安装可上下和左右运动的套环固定杆13,用于固定被测海缆2并配合运动系统的运动。为了减轻质量,台
面3和支撑架12采用表面氧化铝合金6061材料,而由于套环固定杆13经常发生相对运动,易磨损氧化层,故采用不锈钢316材料。
52.环境模拟系统包含一个长20米宽3米高2米的大型断面水槽1,可将整个台架支撑系统和运动模拟系统放在里面。在断面水槽1中安装一台造波机5,由工控机、上位软件、plc、伺服控制系统、变频器和电机等设备组成,能制造规则波、非线性波、单向不规则波、自定义谱、畸形波等,有正反向循环水流和潮汐流控制功能,可模拟海洋洋流环境。断面水槽1注满海水后,配合造波机5可以制造不同高度和类型的波模拟海洋环境,也可以通过调整水位模拟涨潮落潮,甚至可以在断面水槽1内长期培养附着型的海洋生物和微生物来评估海缆所受到的影响。
53.被测海缆2由套环固定杆13固定在监测模拟台架3上,在性能测试中,海缆2可以选择不同直径或材质的电缆,研究长期环境下结构变化和生物附着情况;在精度测试中,海缆2可以搭载不同功能的原位监测系统(如光纤光栅传感器或mems传感器等用于振动、形状监测等),系统的数据存储和图像实时显示可以在工控机8上实现。考虑到成本控制需要,实验过程中海缆2不一定要严格使用电缆,也可以用其他缆状物体(如水管、油管等)。海缆2一般比较昂贵,且不易弯曲扭转,用缆状物代替可进一步节约成本,并增加可运动性。
54.三维激光扫描仪6和上位机7配合使用,一方面可以通过扫描得到被测海缆2相对各个参考点准确的相对位置,与各电机的运动数据相结合和海缆上的光纤光栅传感器或mems传感器的监测结果进行对比;另一方面可以观察海缆上的生物附着的表明铠装破坏情况。因此在长期监测的情况下三维激光扫描仪6会持续工作,需要较强的续航能力。
55.套环固定杆13与丝杠机构11中的滑块固定连接在一起,通过水下电机14驱动丝杠11转动,从而改变滑块在丝杠上的相对位置,使得套环固定杆13在水平方向和竖直方向上的相对位置能够发生变化。由于伺服电机16的速度可调节,因此可以根据运行时间来计算丝杠机构11中的运动量,分析得到被测海缆2的水平和竖直位移,再与三维激光扫描仪6的结果进行对比验证。由于伺服电机16方向也是可调节的,因此也可使套环固定杆13发生两个方向上的周期性往复运动,从而实现低频振动。
56.水下电机14的内部结构如图5所示,由伺服电机16和电机控制板17组成。防水外壳18为表面氧化处理过的铝合金6061。考虑到模拟台架上共有10台电机,选用轻型材料可以有效降低成本。水下电机14通过四芯的水密连接缆10与水槽外的电机通讯板9相连,其中两芯为12v电源,剩下两芯为rs485通讯。电机通讯板9由24v直流电源供电,输出为12v,具有12路rs485通讯口(10路用于水下电机通讯,2路备用),可以分别控制10台电机。
57.本发明的工作过程示例如下:
58.应用实例1:海缆原位环境测试
59.首先将被测试海缆2固定在套环固定杆13上(不同直径的缆可适配不同的套环),然后往断面水槽1中注入海水,并加入部分常见的附着型海洋生物和微生物(海水中虽然具有部分的微生物,但是需要分析特定环境下海缆的变化)。然后启动三维激光扫描仪6,观察海缆2表面的生物附着和铠装结构变化。在一段时间后,启动造波机5人工模拟原位波浪,控制水槽内的水位并配合造波机5模拟潮流环境,观察不同频率谱波浪和潮汐对海缆2的本体和缆上相对位置的变化。启动水下电机14改变海缆上固定点的相对位置,使被测海缆2处于受力状态,持续一段时间后观察海缆2结构是否被破坏,可重复多次上述步骤并改变受力的
程度(改变位移大小)确定海缆2可承受的最大极限。启动电机进行周期性往复运动,可观察并分析单源低频振动和多源低频振动对海缆结构的影响。
60.应用实例2:监测系统原位环境下综合性能评估
61.将传统应用的光纤光栅传感器或mems传感器固定在海缆2上,将其监测数据与数据采集结果实时显示在工控机8中。然后往断面水槽1中注入海水,利用三维激光扫描仪6对海缆2进行扫描,并在上位机7中实时显示,将两者结果进行对比。启动不同位置的电机改变海缆2的相对位置,继续对比两者的监测结果,并计算电机驱动丝杠的位移量,综合评价监测系统的静态性能。启动多台电机进行往复运动,观察监测系统响应的实时性和分辨率,并三维激光扫描仪6的结果进行对比分析动态情况下的监测精度。重复1中步骤,模拟海洋原位环境,利用扫描仪观察监测系统的本体结构是否发生变化,关键零部件是否出现漏水或是损坏等情况,监测结果的准确性是否得到保证,以此来综合评价被试监测系统的综合性能。
62.综上,本发明提出的实验装置和实验方法,可以模拟海缆在风浪流作用下进行的复杂运动,不仅可以得到海缆运动状态下各个点的相对位置,也可以模拟海缆在x-y方向和x-z方向进行低频振动,并实现不同固有频率振动的叠加。不仅可以评估不同材质的海缆复杂运动情况下的损伤情况,也可以为相关监测系统提供相似的海缆运动情况,并评价监测系统的静态和动态性能。
63.需说明,以上仅为本发明的较佳实施举例,并不用于限制本发明,凡在本发明精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1