一种机电一体化的智能探伤检测装置及其使用方法
1.本发明涉及探伤检测设备技术领域,特别是涉及一种机电一体化的智能探伤检测装置及其使用方法。
背景技术:
2.探伤仪从测量原理不同可以分为:数字式超声波探伤仪,超声波探伤仪、磁粉探伤仪、涡流探伤仪、射线探伤仪和荧光探伤仪,主要用于探测机加工件内部有无缺陷,例如:裂纹、砂眼、气孔、白点、夹杂等,焊缝是否合格,查找有无暗伤,从而判定工件合格与否。其中超声波探伤仪是常用的探伤仪器。
3.现有技术的超声探伤仪发明了小车结构的,可以在铁轨上自动移动,从而实现连续探测铁轨的目的,然而小车结构对探伤结构局限,功能单一;现有技术的超声探测仪对管道探伤时,需要人工移动超声探头,对管道进行连续探伤检测;此外不适合检测各种型号的管道。
4.因此,本领域技术人员提供了一种机电一体化的智能探伤检测装置及其使用方法,以解决上述背景技术中提出的问题。
技术实现要素:
5.本发明所要解决的技术问题是,克服现有技术的超声探伤仪的功能单一,不方便对不同型号的管道进行连续探伤。
6.为了解决以上技术问题,本发明提供一种机电一体化的智能探伤检测装置,包括探伤车、供电车,所述探伤车的结构包括一号外壳、驱动机构、定位机构、电路盒和探伤机构,所述一号外壳呈u型的柱体的壳体结构,所述一号外壳的右下棱的前后端的缺口中各设置有一个圆柱体的连接柱、前后侧壁的通孔中各设置有一个按钮,所述按钮的内侧端和连接柱的内侧端通过联动板固定连接,且联动板的内侧面上设置有一号弹簧,所述一号外壳的左下侧壁的前后端各固定有一个管状的连接头,所述一号外壳的底槽的顶侧壁的通孔中设置有一号超声探头;所述供电车的结构包括底板、蓄电池箱和计算机,所述底板呈长方形的板状结构,且前后侧各设置有两个二号车轮,所述蓄电池箱固定在底板的顶侧壁上,所述计算机设置在蓄电池箱的顶侧壁上。
7.所述驱动机构的结构包括一号车轮、转柱、移动板、一号电机、一号齿轮和二号电机,所述一号车轮上设置有倒u型的轮架,所述轮架上设置有驱动马达,所述驱动马达的转子与一号车轮的轮轴固定,所述一号车轮有四个,分别设置在一号外壳的底端底端的四个缺口中;所述转柱呈圆柱体结构,且外侧壁上设置有条状的齿纹,所述转柱有四个,分别设置在一号外壳的四个角部位的空腔中,每个转柱的底端各与一个一号车轮的轮架的顶端固定、顶端各通过一个轴承与移动板转动连接;所述移动板呈回形的板状结构,所述移动板设置在一号外壳的顶部空腔中,所述移动板的垂直通孔中设置有导杆,所述导杆垂直固定在一号外壳的顶部空腔中;所述一号电机设置在一号外壳的顶部空腔中,且转子顶端固定有
一号丝杆,所述一号丝杆上螺套的移动块固定在移动板的通孔中;所述一号齿轮有四个,且都设置在一号外壳的顶部空腔中,每个一号齿轮的齿轮柱的顶端各设置有一个从动轮,每个一号齿轮各与一个转柱啮合;所述二号电机设置在一号外壳的顶部空腔中,所述二号电机的转子顶端固定有主动轮,所述主动轮和四个从动轮通过皮带连接。
8.所述定位机构的结构包括导块、双向气缸,所述导块有两个,且设置在一号外壳的底槽的顶侧壁上;所述双向气缸设置在一号外壳的顶部空腔的底侧壁上,所述双向气缸的两端分别与两个导块固定连接。
9.所述电路盒固定在一号外壳的顶侧壁上,所述电路盒中设置有控制电路板,且侧壁通孔各种设置有一号接口、控制按钮和声光报警器,所述控制电路板与驱动机构、定位机构和探伤机构电性连接;所述控制按钮与控制电路板电性连接;所述声光报警器与控制电路板电性连接;所述一号接口与控制电路板电性连接,所述数据线的插头插入到一号接口中。
10.所述探伤机构的结构包括移动柱、三号电机,所述移动柱呈四棱柱体的壳体结构,所述移动柱的底端通孔中设置有二号超声探头,所述移动柱有两个,分别设置在一号外壳的前后侧壁的凹槽中;所述三号电机有两个,分别设置在一号外壳的前后壁的通孔中,每个三号电机的转子顶端固定有一个二号丝杆,每个二号丝杆上螺套的移动块各与一个移动柱固定连接。
11.所述底板的下侧设置有限位轨,所述限位轨的结构包括上轨、侧轨,所述上轨呈倒u形的柱体结构,且底侧壁上固定有定位槽,所述上轨固定在底板的底侧壁上;所述侧轨呈柱体结构,且顶侧壁的通孔中各设置有一个定位柱,所述定位柱的底端通过二号弹簧与侧轨连接,所述侧轨的侧壁的凹槽中设置有卷轴,所述卷轴上固定有拉绳,所述拉绳的顶端与定位柱的底端固定,所述卷轴的外侧端固定有二号旋钮,所述侧轨有两个,分别与上轨的两个底端通过合页铰接。
12.所述蓄电池箱上设置有卷线机,所述卷线机的结构包括二号外壳、卷筒、四号电机、转头,所述二号外壳呈半椭圆形的柱体的壳体结构,且左侧壁上设置的条形通孔为穿线孔,所述二号外壳固定在蓄电池箱的顶侧壁上;所述卷筒呈圆柱体的壳体结构,所述卷筒设置在二号外壳的空腔中,且后端通过扭簧与二号外壳的后壁转动连接,所述卷筒上卷绕数据线;所述四号电机固定在二号外壳的前侧壁上,所述四号电机的转子端与卷筒的前端固定连接;所述转头设置在二号外壳的后侧壁的通孔中,且固定在卷筒的后壁通孔中,所述转头的通孔中设置有二号接口,所述数据线插入到卷筒的空腔中,且与二号接口电性连接。
13.所述一号外壳的顶侧壁的右端缺口中设置有连接块,所述连接块的前后端各设置有一个滑块,两个滑块分别插入到右端缺口的前后侧壁的滑槽中,所述连接块的前后侧壁的凹槽中各设置有一个插块,所述插块上设置有齿纹,所述连接块的空腔中设置有二号齿轮,所述二号齿轮的左右端分别与两个插块啮合,所述连接块的顶侧壁上设置有一号旋钮,所述一号旋钮的转子与二号齿轮的齿轮柱固定连接;所述一号外壳的顶侧壁的左端缺口为连接口,所述连接口的前后侧壁各设置有插槽。
14.本发明还提供一种采用上述机电一体化的智能探伤检测装置的使用步骤如下:
15.1)首先取若干个探伤车,并横向排列,将左侧的探伤车的滑块在滑槽中向右滑动,使得连接块向右插入到右侧的探伤车的连接口中,旋转一号旋钮带动二号齿轮转动,二号
齿轮带动两个插块从连接块中探出后插入到插槽中,使得连接块固定在连接口中;
16.2)再将探伤车罩在铁轨上,使得一号超声探头贴在铁轨的顶侧壁上,然后操控双头气缸、一号电机和三号电机运行,双向气缸驱动两个导块相向移动,两个导块分别贴在铁轨的两侧,一号电机驱动一号丝杆转动,使得移动块带动移动板向下移动,并通过转柱带动一号车轮向下移动,使得一号车轮抵在铁轨座上,三号电机驱动二号丝杆转动,使得移动块带动移动柱向上或向下移动,使得二号超声探头贴在铁轨的座上,驱动马达驱动一号车轮转动,使得一号车轮在铁轨上滚动,使得一号超声探头连续对铁轨探伤、二号超声探头连续对铁轨的座探伤;
17.3)取若干个探伤车,先将一个探伤车上的按钮向内侧按动,并通过联动板带动连接柱缩进一号外壳中;然后将一个探伤车的连接头先插入到相邻的探伤车的缺口中,之后松动按钮,一号弹簧通过联动板推动连接柱向外侧移动,使得连接柱插入到连接头中,使得两个探伤车铰接;将若干个探伤车串联呈环形并套在管道上;
18.4)然后控制若干个探伤车同步运行,使得若干个一号车轮抵在管道的外侧壁上,控制若干个探伤车的三号电机运行,使得若干个二号超声探头贴在管道的外侧壁上,然后驱动马达驱动一号车轮沿着管道转动一圈,使得二号超声探头围绕管道探伤,然后二号电机运行驱动主动轮转动,主动轮通过皮带带动从动轮转动,从动轮带动一号齿轮转动,使得一号齿轮带动转柱转动,转柱水平转动后带动一号车轮转动九十度,使得一号车轮朝着管道的方向滚动,对下一节管道探伤。
19.步骤2)中,探伤车在铁轨上移动时,将供电车沿着铁轨推动:先将上轨搭在铁轨上;然后旋动二号旋钮,二号旋钮带动卷轴转动,卷轴卷收拉绳,拉绳向下拉动定位柱,使得定位柱缩进侧轨中;同时向下转动侧轨,使得侧轨贴在铁轨的侧面,然后松开二号旋钮;二号弹簧向上推动定位柱,使得定位柱插入到定位槽中,使得侧轨与上轨定位;侧轨贴在铁轨的两侧,使得限位轨沿着铁轨滑动,方便供电车在铁轨上移动。
20.步骤1)或步骤3)中,探伤车安装在铁轨或管道上后,再将探伤车与供电车电性连接:将蓄电池箱和计算机的插头插入到二号接口中,数据线的插头插入到一号接口中,使得供电车与探伤车电性连接;四号电机驱动卷筒转动,使得卷筒卷收或卷放数据线;当绊住数据线时,数据线拉动卷筒,卷筒转动放出数据线,扭簧扭动起到缓冲作用。
21.本发明的有益效果是:
22.(1)本发明设置探伤车,现有技术的超声波探伤仪不能同时适用铁轨和管道;本发明的探伤车,可通过连接柱和连接头使得多个探伤车串联成一串,对铁轨连续多次探伤;多个探伤车串联成环形,并套在管道上,多个探伤车绕着管道转动,连续对管道不通方位进行探伤。
23.(2)本发明设置驱动机构,现有技术的超声波探伤仪常采用手动的方式移动探头,以对管道的不通部位进行探伤;本发明的可伸缩的一号车轮和移动柱,使得多个探伤仪定位在管道上,使得一号车轮可绕着管道滚动,使得二号超声探头绕到管道的不同方位进行探伤;本发明的可转动的转柱,使得一号车轮可转动至与管道水平,使得一号车轮可沿着管道滚动,使得二号超声探头移动至管道的不通部位进行探伤。
24.(3)本发明设置限位轨,现有技术的供电车不方便在不平整的铁轨路上滚动;本发明的侧轨与上轨采用铰接的形式连接,方便将限位轨安装在铁轨上,或者从铁轨上取下,限
位轨沿着铁轨滑动,使得供电车沿着铁轨移动。
25.(4)本发明设置卷线机,现有技术的超声波探伤车与供电车之间的数据线容易被勾住,成为障碍;本发明的卷线机可自动收放数据线,方便在移动的过程中调节线长;并且通过扭簧的扭力缓冲数据线对卷筒的拉力。
附图说明
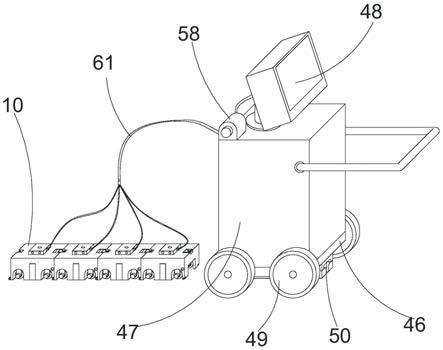
26.图1为本发明的立体图;
27.图2为探伤车的立体图;
28.图3为探伤车的右视的剖视图;
29.图4为探伤车的水平截面图;
30.图5为连接块的水平截面图;
31.图6为探伤车对管道检测使得示意图;
32.图7为限位轨的截面图;
33.图8为卷线机的左视的剖视图。
34.其中:一号外壳10、轮架11、一号车轮12、驱动马达13、导块14、双头气缸15、一号超声探头16、转柱17、移动板18、一号电机19、一号丝杆20、导杆21、一号齿轮22、从动轮23、皮带24、二号电机25、主动轮26、移动柱27、三号电机28、二号丝杆29、连接柱30、联动板31、一号弹簧32、按钮33、连接头34、连接块35、滑块36、插块37、二号齿轮38、一号旋钮39、连接口40、插槽41、电路盒42、一号接口43、控制按钮44、声光报警器45、底板46、蓄电池箱47、计算机48、二号车轮49、上轨50、侧轨51、定位柱52、二号弹簧53、卷轴54、拉绳55、二号旋钮56、二号外壳58、卷筒59、数据线61、转头62、二号接口63、四号电机64、管道65。
具体实施方式
35.本实施例提供的一种机电一体化的智能探伤检测装置,结构如图2-5和图7-8所示,包括探伤车、供电车,所述探伤车的结构包括一号外壳10、驱动机构、定位机构、电路盒42和探伤机构,所述一号外壳10呈u型的柱体的壳体结构,所述一号外壳10的右下棱的前后端的缺口中各设置有一个圆柱体的连接柱30、前后侧壁的通孔中各设置有一个按钮33,所述按钮33的内侧端和连接柱30的内侧端通过联动板31固定连接,且联动板31的内侧面上设置有一号弹簧32,向内侧按动按钮33,并通过联动板31带动连接柱缩进一号外壳10中,所述一号外壳10的左下侧壁的前后端各固定有一个管状的连接头34,一个探伤车的连接头34先插入到另一个探伤车的缺口中,之后松动按钮33,一号弹簧32通过联动板31推动连接柱30向外侧移动,使得连接柱30插入到连接头34中,使得两个探伤车铰接,所述一号外壳10的底槽的顶侧壁的通孔中设置有一号超声探头16,所述一号超声探头16对铁轨进行探伤;所述供电车的结构包括底板46、蓄电池箱47和计算机48,所述底板46呈长方形的板状结构,且前后侧各设置有两个二号车轮49,所述蓄电池箱47固定在底板46的顶侧壁上,以提供电能,所述计算机48设置在蓄电池箱47的顶侧壁上,以接收并处理超声探头的信号,并控制探伤车运行。
36.所述驱动机构的结构包括一号车轮12、转柱17、移动板18、一号电机19、一号齿轮22和二号电机25,所述一号车轮12上设置有倒u型的轮架11,所述轮架11上设置有驱动马达
13,所述驱动马达13的转子与一号车轮12的轮轴固定,所述一号车轮12有四个,分别设置在一号外壳10的底端的四个缺口中,所述驱动马达13驱动一号车轮12转动,使得一号车轮12在铁轨上滚动,或者在管道65上滚动;所述转柱17呈圆柱体结构,且外侧壁上设置有条状的齿纹,所述转柱17有四个,分别设置在一号外壳10的四个角部位的空腔中,每个转柱17的底端各与一个一号车轮12的轮架11的顶端固定、顶端各通过一个轴承与移动板18转动连接,所述转柱17水平转动后带动一号车轮12转动,以调节一号车轮12的滚动方向;所述移动板18呈回形的板状结构,所述移动板18设置在一号外壳10的顶部空腔中,所述移动板18的垂直通孔中设置有导杆21,所述导杆21垂直固定在一号外壳10的顶部空腔中,起到导向的作用,所述移动板18向下移动后,通过转柱17带动一号车轮12向下移动,使得一号车轮12抵在铁轨座上或者管道65外侧壁上;所述一号电机19设置在一号外壳10的顶部空腔中,且转子顶端固定有一号丝杆20,所述一号丝杆20上螺套的移动块固定在移动板18的通孔中,所述一号电机19驱动一号丝杆20转动,使得移动块带动移动板18向上或向下移动;所述一号齿轮22有四个,且都设置在一号外壳10的顶部空腔中,每个一号齿轮22的齿轮柱的顶端各设置有一个从动轮23,每个一号齿轮22各与一个转柱17啮合,所述从动轮23带动一号齿轮22转动,使得一号齿轮22带动转柱17转动;所述二号电机25设置在一号外壳10的顶部空腔中,所述二号电机25的转子顶端固定有主动轮26,所述主动轮26和四个从动轮23通过皮带24连接,所述二号电机25驱动主动轮26转动,主动轮26通过皮带24带动从动轮23转动。
37.所述定位机构的结构包括导块14、双向气缸15,所述导块14有两个,且设置在一号外壳10的底槽的顶侧壁上,两个导块14分别贴在铁轨的两侧,并沿着铁轨滑动,限定探伤车的轨迹;所述双向气缸15设置在一号外壳10的顶部空腔的底侧壁上,所述双向气缸15的两端分别与两个导块14固定连接,所述双向气缸15收缩后,驱动两个导块14相向移动。
38.所述电路盒42固定在一号外壳10的顶侧壁上,所述电路盒42中设置有控制电路板,且侧壁通孔各种设置有一号接口43、控制按钮44和声光报警器45,所述控制电路板与驱动机构、定位机构和探伤机构电性连接,起到中央控制处理作用;所述控制按钮44与控制电路板电性连接,便于输送指令;所述声光报警器45与控制电路板电性连接,并在检测到损伤后响应,起到及时提醒使用者的作用;所述一号接口43与控制电路板电性连接,所述数据线61的插头插入到一号接口43中,使得探伤车与供电车信号交流。
39.所述探伤机构的结构包括移动柱27、三号电机28,所述移动柱27呈四棱柱体的壳体结构,所述移动柱27的底端通孔中设置有二号超声探头,所述移动柱27有两个,分别设置在一号外壳10的前后侧壁的凹槽中,所述移动柱27向下移动后,使得二号超声探头贴在铁轨的座上或者管道65上;所述三号电机28有两个,分别设置在一号外壳10的前后壁的通孔中,每个三号电机28的转子顶端固定有一个二号丝杆29,每个二号丝杆29上螺套的移动块各与一个移动柱27固定连接,所述三号电机28驱动二号丝杆29转动,使得移动块带动移动柱27向上或向下移动。
40.所述底板46的下侧设置有限位轨,所述限位轨的结构包括上轨50、侧轨51,所述上轨50呈倒u形的柱体结构,且底侧壁上固定有定位槽,所述上轨50固定在底板46的底侧壁上,所述上轨50搭在铁轨上;所述侧轨51呈柱体结构,且顶侧壁的通孔中各设置有一个定位柱52,所述定位柱52的底端通过二号弹簧53与侧轨51连接,所述二号弹簧53向上推动定位柱52,使得定位柱52插入到定位槽中,使得侧轨51与上轨50定位,所述侧轨51的侧壁的凹槽
中设置有卷轴54,所述卷轴54上固定有拉绳55,所述卷轴54卷收拉绳55,所述拉绳55的顶端与定位柱52的底端固定,所述拉绳55向下拉动定位柱52,使得定位柱52缩进侧轨51中,所述卷轴54的外侧端固定有二号旋钮56,所述二号旋钮56带动卷轴54转动,所述侧轨51有两个,分别与上轨50的两个底端通过合页铰接,所述侧轨51贴在铁轨的两侧,使得限位轨沿着铁轨滑动,方便供电车在铁轨上移动。
41.所述蓄电池箱47上设置有卷线机,所述卷线机的结构包括二号外壳58、卷筒59、四号电机64、转头62,所述二号外壳58呈半椭圆形的柱体的壳体结构,且左侧壁上设置的条形通孔为穿线孔,所述二号外壳58固定在蓄电池箱47的顶侧壁上;所述卷筒59呈圆柱体的壳体结构,所述卷筒59设置在二号外壳58的空腔中,且后端通过扭簧60与二号外壳58的后壁转动连接,所述卷筒59上卷绕数据线61,绊住数据线61时,数据线拉动卷筒59,卷筒59转动放出数据线61,扭簧60扭动起到缓冲作用;所述四号电机64固定在二号外壳58的前侧壁上,所述四号电机64的转子端与卷筒59的前端固定连接,所述四号电机64驱动卷筒59转动,使得卷筒59卷收或卷放数据线61;所述转头62设置在二号外壳58的后侧壁的通孔中,且固定在卷筒59的后壁通孔中,所述转头62的通孔中设置有二号接口63,所述数据线61插入到卷筒59的空腔中,且与二号接口63电性连接,所述蓄电池箱47和计算机48的插头插入到二号接口63中,使得供电车与探伤车电性连接。
42.所述一号外壳10的顶侧壁的右端缺口中设置有连接块35,所述连接块35的前后端各设置有一个滑块36,两个滑块36分别插入到右端缺口的前后侧壁的滑槽中,所述连接块35的前后侧壁的凹槽中各设置有一个插块37,所述插块37上设置有齿纹,所述连接块35的空腔中设置有二号齿轮38,所述二号齿轮38的左右端分别与两个插块37啮合,所述连接块35的顶侧壁上设置有一号旋钮39,所述一号旋钮39的转子与二号齿轮38的齿轮柱固定连接;所述一号外壳10的顶侧壁的左端缺口为连接口40,所述连接口40的前后侧壁各设置有插槽41,一个探伤车的滑块36在滑槽中向右滑动,使得连接块37向右插入到另一个探伤车的连接口40中,旋转一号旋钮39带动二号齿轮38转动,二号齿轮38带动两个插块37从连接块35中探出后插入到插槽41中,使得连接块35固定在连接口40中,使得两个探伤车左右固定连接。
43.结合附图1和图6,本发明所述的机电一体化的智能探伤检测装置的使用步骤如下:
44.1)首先取若干个探伤车,并横向排列,将左侧的探伤车的滑块36在滑槽中向右滑动,使得连接块35向右插入到右侧的探伤车的连接口40中,旋转一号旋钮39带动二号齿轮38转动,二号齿轮38带动两个插块37从连接块35中探出后插入到插槽41中,使得连接块35固定在连接口40中;
45.2)再将探伤车罩在铁轨上,使得一号超声探头16贴在铁轨的顶侧壁上,然后操控双头气缸15、一号电机19和三号电机28运行,双向气缸15驱动两个导块14相向移动,两个导块14分别贴在铁轨的两侧,一号电机19驱动一号丝杆20转动,使得移动块带动移动板18向下移动,并通过转柱17带动一号车轮12向下移动,使得一号车轮12抵在铁轨座上,三号电机28驱动二号丝杆29转动,使得移动块带动移动柱27向上或向下移动,使得二号超声探头贴在铁轨的座上,驱动马达13驱动一号车轮12转动,使得一号车轮12在铁轨上滚动,使得一号超声探头16连续对铁轨探伤、二号超声探头连续对铁轨的座探伤;
46.3)取若干个探伤车,先将一个探伤车上的按钮33向内侧按动,并通过联动板31带动连接柱缩进一号外壳10中;然后将一个探伤车的连接头34先插入到相邻的探伤车的缺口中,之后松动按钮33,一号弹簧32通过联动板31推动连接柱30向外侧移动,使得连接柱30插入到连接头34中,使得两个探伤车铰接;将若干个探伤车串联呈环形并套在管道65上;
47.4)然后控制若干个探伤车同步运行,使得若干个一号车轮12抵在管道65的外侧壁上,控制若干个探伤车的三号电机28运行,使得若干个二号超声探头贴在管道65的外侧壁上,然后驱动马达13驱动一号车轮12沿着管道65转动一圈,使得二号超声探头围绕管道65探伤,然后二号电机25运行驱动主动轮26转动,主动轮26通过皮带24带动从动轮23转动,从动轮23带动一号齿轮22转动,使得一号齿轮22带动转柱17转动,转柱17水平转动后带动一号车轮12转动九十度,使得一号车轮12朝着管道65的方向滚动,对下一节管道65探伤。
48.步骤2)中,探伤车在铁轨上移动时,将供电车沿着铁轨推动:先将上轨搭在铁轨上;然后旋动二号旋钮56,二号旋钮56带动卷轴54转动,卷轴54卷收拉绳55,拉绳55向下拉动定位柱52,使得定位柱52缩进侧轨51中;同时向下转动侧轨51,使得侧轨51贴在铁轨的侧面,然后松开二号旋钮56;二号弹簧53向上推动定位柱52,使得定位柱52插入到定位槽中,使得侧轨51与上轨50定位;侧轨51贴在铁轨的两侧,使得限位轨沿着铁轨滑动,方便供电车在铁轨上移动。
49.步骤1)或步骤3)中,探伤车安装在铁轨或管道上后,再将探伤车与供电车电性连接:将蓄电池箱47和计算机48的插头插入到二号接口63中,数据线61的插头插入到一号接口43中,使得供电车与探伤车电性连接;四号电机64驱动卷筒59转动,使得卷筒59卷收或卷放数据线61;当绊住数据线61时,数据线拉动卷筒59,卷筒59转动放出数据线61,扭簧60扭动起到缓冲作用。
50.本发明采用多个探伤仪在铁轨上移动,可同时对铁轨进行多次超声探伤;采用多个探伤仪串联成环,并套在管道上,且在管道上转动或直行,可对管道进行连续且自动探伤。
51.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
52.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1