一种壳体声纳与拖曳线列阵声纳目标航迹关联方法与流程
1.本发明属于声纳技术领域,适用于潜艇声纳系统、水面舰艇声纳系统中壳体声纳与拖曳线列阵声纳对水下被动探测目标航迹进行关联处理的技术领域,主要是一种壳体声纳与拖曳线列阵声纳目标航迹关联方法。
背景技术:
2.现代潜艇声纳系统、水面舰艇声纳系统主要由壳体声纳和拖曳线列阵声纳组成。壳体声纳相比拖曳线列阵声纳具有安装精度高,阵形一致性好,探测目标时测向误差小的优点,但基阵孔径受平台空间限制,难以进一步扩展;拖曳线列阵声纳拖曳于舰艇艉向后部,相较于壳体声纳受平台背景噪声影响小,且其基阵孔径不受平台空间限制,可实现对远距离目标探测,但拖曳基阵为柔性阵,在拖曳的过程中,易产生阵形畸变,测向误差大,且单条线阵在非机动条件下还存在左右舷模糊的情况。
3.水下目标统一态势生成中一项重要功能是将壳体声纳探测的目标航迹与拖曳线列阵声纳探测的目标航迹进行关联处理,综合管理不同声纳探测的目标,明确目标数量和同一目标特性,为后续生成舰艇统一目标态势打下铺垫。
技术实现要素:
4.本发明的目的在于克服现有技术存在的不足,而提供一种壳体声纳与拖曳线列阵声纳目标航迹关联方法。
5.本发明的目的是通过如下技术方案来完成的。一种壳体声纳与拖曳线列阵声纳目标航迹关联方法,包括步骤如下:
6.(1)、依据壳体声纳、拖曳线列阵声纳设定的探测频段、传播损失、背景噪声级、基阵增益建立壳体声纳、拖曳线列阵声纳目标输出信噪比转化为目标归一化能量的公式:
7.壳体声纳目标能量归一化:
[0008][0009]
其中,目标在1000hz处谱级为s0,中心频点f
k0
处传播损失处传播损失为中心频率点处传播损失与1000hz处传播损失的差值,1000hz处背景噪声谱级为nl
k0
,1000hz处基阵增益为di
k0
,n为不同频点,壳体声纳探测频段为[f
kl
,f
ku
];壳体声纳实际探测得到的目标输出信噪比为snrk;tran(),tran-1
()为数值转换运算,tran(a)=10
(a/10)
,tran-1
(a)=10log(a)。
[0010]
拖曳线列阵声纳目标能量归一化:
[0011][0012]
其中,目标在1000hz处谱级为s0,中心频点f
t0
处传播损失为处传播损失为为中心频点f
t0
处传播损失为与1000hz处传播损失的差值,1000hz处背景噪声谱级为nl
t0
,1000hz处基阵增益为di
t0
,m为不同频点,拖曳线列阵声纳探测频段为[f
tl
,f
tu
];拖曳线列阵声纳实际探测得到的目标输出信噪比为snr
t
;
[0013]
(2)、针对壳体声纳与拖曳线列阵声纳之间测向精度特性差异较大从而影响关联性能的问题,对目标航迹进行划分块集处理,每批次关联处理仅针对所选参考航迹所处本块集及左右相邻块集内的目标航迹进行关联的处理方法;
[0014]
(3)、针对壳体声纳与拖曳线列阵声纳之间测向精度特性差异较大从而影响关联性能的问题,采用方位、能量、demon多特征联合航迹关联算法,建立目标多阶方位特征状态差值、目标零阶能量特征状态差值目标零阶demon谱特征状态差值分别计算得出目标方位关联度γb、能量关联度γe和demon谱关联度γd,再由多特征联合关联度共同判决壳体声纳与拖曳线列阵声纳之间的目标航迹关联特性;其中,λ1、λ2、λ3为各特征关联度系数。
[0015]
更进一步的,对目标航迹进行划分块集处理,首先将舰艇360
°
方位每隔10
°
划分为一个块集,1号块集:0
°
~10
°
,2号块集:10
°
~20
°
,
……
,18号块集:170
°
~180
°
,19号块集:-180
°
~-170
°
,
……
,36号块集:-10
°
~0
°
共36个方位集;取壳体声纳目标航迹作为参考航迹,拖曳线列阵声纳目标航迹作为比较航迹,将其方位序列数据转化为各方位集序号,其中壳体声纳目标航迹可划分为方位块集1~36,拖曳线列阵声纳目标航迹划分为方位块集1~18,每批次关联处理仅针对参考航迹所处本块集及左右相邻块集内的目标航迹进行关联。
[0016]
更进一步的,目标方位特征关联度:
[0017]
选取壳体声纳的航迹信息作为参考航迹,拖曳线列阵声纳的航迹信息作为比较航迹,分别记为和
[0018]
零阶方位状态差:
[0019]
一阶方位斜率差:
[0020]
二阶方位斜率差:
[0021][0022]
则方位参考航迹与比较航迹之间的关联度为:
[0023][0024]
式中,i为壳体声纳第i个目标的标号,j为拖曳线列阵声纳第j个目标的标号,l为航迹序列点数,分别为描述方位相似性的零阶状态差、一阶斜率差和二阶斜率差,γb为方位灰关联度。
[0025]
更进一步的,目标能量特征关联度:
[0026]
选取壳体声纳的目标能量特征序列作为参考序列,拖曳线列阵声纳的目标能量特征序列作为比较序列,分别记为和因目标能量在短时间内变化小,这里仅采用零阶状态差作为比较量;
[0027]
零阶能量状态差:
[0028]
则目标能量参考序列与比较序列之间的关联度为:
[0029][0030]
更进一步的,目标demon谱特征关联度:
[0031]
选取壳体声纳的demon谱特征作为参考序列,拖曳线列阵声纳的demon谱特征作为比较序列,分别记为和目标demon谱特征和目标桨叶数、转速相关,其在匀速直航状态下,基本不变,这里仅采用零阶状态差作为比较量。
[0032]
零阶demon谱状态差:
[0033]
则目标demon谱特征参考序列与比较序列之间的关联度为:
[0034][0035]
本发明的有益效果为:根据壳体声纳与拖曳线列阵声纳之间由于测向精度特性差异较大,仅采用舷角相似性进行目标航迹关联,易出现目标航迹关联性能下降的问题,通过提取目标的舷角、信噪比、demon谱等多维特征,进行联合关联处理,可有效增加壳体声纳与拖曳线列阵声纳目标航迹关联的鲁棒性,提升关联正确率。
附图说明
[0036]
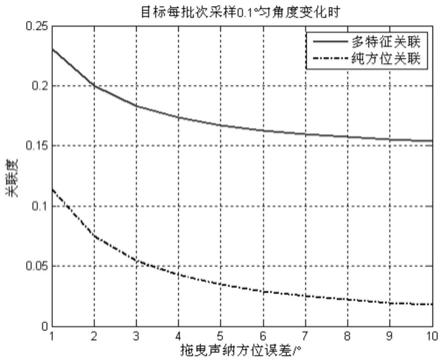
图1为目标每批次采样0.1
°
匀角度变化,壳体声纳探测目标方位时的系统误差和随机误差均为1
°
时,纯方位关联与多特征关联的关联度随拖曳线列阵声纳方位误差变化图。
[0037]
图2为目标每批次采样1
°
匀角度变化,壳体声纳探测目标方位时的系统误差和随机误差均为1
°
时,纯方位关联与多特征关联的关联度随拖曳线列阵声纳方位误差变化图。
[0038]
图3为目标每批次采样0.1
°
匀角度变化,壳体声纳探测目标方位时的系统误差和随机误差均为2
°
时,纯方位关联与多特征关联的关联度随拖曳线列阵声纳方位误差变化图。
[0039]
图4为目标每批次采样1
°
匀角度变化,壳体声纳探测目标方位时的系统误差和随机误差均为2
°
时,纯方位关联与多特征关联的关联度随拖曳线列阵声纳方位误差变化图。
[0040]
图5为方位、能量、demon多特征联合航迹关联算法流程图。
具体实施方式
[0041]
下面将结合附图和实施例对本发明做详细的介绍:
[0042]
本发明主要从壳体声纳、拖曳线列阵声纳探测目标数据中提取目标的舷角、信噪比、demon谱等多维特征进行联合关联处理,用以解决壳体声纳与拖曳线列阵声纳之间测向精度特性差异较大从而影响关联性能的问题,增加壳体声纳与拖曳线列阵声纳目标航迹关联的鲁棒性,提升关联正确率。
[0043]
(1)对目标航迹进行划分块集处理
[0044]
壳体声纳、拖曳线列阵声纳测向精度误差主要由系统误差和随机误差组成。壳体声纳测向系统误差主要由基阵安装误差、基阵阵元和前置预处理通道相位不一致性引起,随机误差主要由声速测量误差和航向误差引起;拖曳线列阵声纳测向系统误差主要由阵形畸变、基阵声中心与艇中心不重合、基阵阵元和前置预处理通道相位不一致性等引起,随机误差主要由声速测量误差、航向误差和阵列随机摆动等引起。
[0045]
考虑到壳体声纳、拖曳线列阵声纳测向精度误差的差异性,可对目标航迹进行划分块集处理。首先将舰艇360
°
方位每隔10
°
划分为一个块集,1号块集:0
°
~10
°
,2号块集:10
°
~20
°
,
……
,18号块集:170
°
~180
°
,19号块集:-180
°
~-170
°
,
……
,36号块集:-10
°
~0
°
共36个方位集。
[0046]
然后取壳体声纳目标航迹作为参考航迹,拖曳线列阵声纳目标航迹作为比较航迹,将其方位序列数据转化为各方位集序号,其中壳体声纳目标航迹可划分为方位块集1~36,拖曳线列阵声纳目标航迹划分为方位块集1~18,每批次关联处理仅针对参考航迹所处本块集及左右相邻块集内的目标航迹进行关联。
[0047]
(2)引入目标输出信噪比特征
[0048]
声纳探测的目标输出信噪比主要由目标源级、传播损失、背景噪声级、基阵增益、基阵处理频段等因素决定,以下推导得出不同声纳目标输出信噪比与这些因素之间的关系。
[0049]
①
壳体声纳探测频段为[f
kl
,f
ku
],其不同频点处的目标源级为sn,传播损失为tln,背景噪声级为nln,基阵增益为din,n∈[f
kl
,f
ku
],则实际探测得到的目标输出信噪比为
snrk:
[0050][0051]
其中,tran(),tran-1
()为数值转换运算,tran(a)=10
(a/10)
,tran-1
(a)=10log(a)。
[0052]
依据目标特性分析,设目标在1000hz处谱级为s0,且在声纳探测频段内,目标谱级随频率每倍频程-6db衰减;假定声纳探测频段内传播损失tln以中心频点f
k0
处传播损失为准,其与1000hz处传播损失tl0相差一个固定量值壳体声纳背景噪声级nln可分为平台噪声与海洋环境噪声组成,依据噪声特性分析,平台噪声与海洋环境噪声谱级均随频率每倍频程-6db衰减,设1000hz处背景噪声谱级为nl
k0
;壳体声纳基阵增益din与基阵有效面积有关,与频率成二次方关系,设1000hz处基阵增益为di
k0
,则上式可变为
[0053][0054]
②
拖曳线列阵声纳探测频段为[f
tl
,f
tu
],其中心频点f
t0
处传播损失为其与1000hz处传播损失tl0相差一个固定量值拖曳线列阵声纳背景噪声级为nlm可分为辐射噪声、流噪声与海洋环境噪声组成,依据噪声特性分析,辐射噪声、流噪声与海洋环境噪声谱级均随频率每倍频程-6db衰减,设1000hz处背景噪声谱级为nl
t0
;拖曳线列阵声纳基阵增益dim与基阵阵元个数有关,与频率成线性关系,设1000hz处基阵增益为di
t0
,则实际探测得到的目标输出信噪比为snr
t
:
[0055][0056]
则依据上述壳体声纳、拖曳线列阵声纳探测所得目标输出信噪比与目标源级、传播损失、背景噪声级、基阵增益、基阵处理频段等因素的关系式,可对壳体声纳与拖曳线列阵声纳探测目标能量进行归一化处理,排除目标本身特性与传播特性的因素之外的影响。
[0057]
壳体声纳目标能量归一化:
[0058][0059]
拖曳线列阵声纳目标能量归一化:
[0060][0061]
(3)引入demon谱特征
[0062]
壳体声纳、拖曳线列阵声纳因布阵设计、功能设计等差异,壳体声纳工作频段主要集中在中高频(1000hz以上),拖曳线列阵声纳工作频段主要在低频段(1000hz以下),两者常用工作频段重合度小,带来探测目标频谱信息差异。而demon谱是通过对接收的宽带信号进行解调以获取低频的包络谱,进而获取目标轴频、叶频等低频物理特征。对于不同基阵来说,虽处理频带范围不同,但同时都可以获取低频的demon谱信息,利用不同基阵所获取的同一目标的demon谱信息,即目标波束的demon谱信息,可以达到改善目标航迹关联质量和正确关联度的目的。
[0063]
(4)航迹拟合
[0064]
壳体声纳、拖曳线列阵声纳因基阵孔径、背景噪声等差异,对水面舰艇、潜艇等目标作用距离不同,拖曳线列阵声纳相较于壳体声纳可探测距离更远。若目标正处于壳体声纳可探测距离边界处时,易出现拖曳线列阵声纳探测目标航迹稳定,而壳体声纳探测目标航迹出现断续的情况,此时若直接进行航迹关联处理,因受数据断点影响,关联度计算不能准确反映航迹之间的相似性。故需在关联度计算之前,对目标航迹进行拟合处理,出现断点数据时,通过拟合算法可直接递推得出该时刻的航迹数据,保证航迹连续性。
[0065]
水面舰艇、潜艇等目标一般以匀速直线运动状态巡航,则设定目标相对于本平台作匀速直线运动。
[0066]
则目标方位正切值为
[0067]
其中,r
x0
、r
y0
为目标相对本平台的初值位置横坐标值和纵坐标值,v
x
、vy为目标相对本平台的速度横坐标值、纵坐标值,t为时间。
[0068]
当且r
y0
≠0时,则
[0069]
可得出匀速直线运动条件下,当t较小时,目标方位正切值与时间呈线性关系,则可依据此关系对目标方位航迹进行拟合处理。
[0070]
(5)多特征联合关联度
[0071]
①
目标方位特征关联度
[0072]
选取壳体声纳的航迹信息作为参考航迹,拖曳线列阵声纳的航迹信息作为比较航迹,分别记为和
[0073]
零阶方位状态差:
[0074]
一阶方位斜率差:
[0075]
二阶方位斜率差:
[0076][0077]
则方位参考航迹与比较航迹之间的关联度为:
[0078][0079]
式中,i为壳体声纳第i个目标的标号,j为拖曳线列阵声纳第j个目标的标号,l为航迹序列点数,分别为描述方位相似性的零阶状态差、一阶斜率差和二阶斜率差,γb为方位灰关联度。
[0080]
②
目标能量特征关联度
[0081]
选取壳体声纳的目标能量特征序列作为参考序列,拖曳线列阵声纳的目标能量特征序列作为比较序列,分别记为和因目标能量在短时间内变化小,这里仅采用零阶状态差作为比较量。
[0082]
零阶能量状态差:
[0083]
则目标能量参考序列与比较序列之间的关联度为:
[0084][0085]
③
目标demon谱特征关联度
[0086]
选取壳体声纳的demon谱特征作为参考序列,拖曳线列阵声纳的demon谱特征作为比较序列,分别记为和目标demon谱特征和目标桨叶数、转速相关,其在匀速直航状态下,基本不变,这里仅采用零阶状态差作为比较量。
[0087]
零阶demon谱状态差:
[0088]
则目标demon谱特征参考序列与比较序列之间的关联度为:
[0089][0090]
④
多特征联合关联度
[0091]
多特征联合关联度由目标方位特征关联度、目标能量特征关联度和目标demon谱特征关联度构成。
[0092][0093]
其中,λ1、λ2、λ3为各特征关联度系数,其与各特征在联合关联度中所起作用大小有关。
[0094]
实施例:
[0095]
设定一运动目标从观测点90
°
方向按匀角度(每批次采样0.1
°
或1
°
情况)变化运动,壳体声纳探测目标方位时的系统误差和随机误差均为1
°
或2
°
情况,拖曳线列阵声纳探测目标方位时的系统误差和随机误差从1
°
变化至10
°
,壳体声纳、拖曳线列阵声纳探测目标时能量起伏最大值均为30%,服从均匀分布,demon谱特征提取最大误差为1hz,服从均匀分布。对纯方位关联与方位、能量、demon多特征联合航迹关联算法对比图如图1-4所述。
[0096]
从图中可以看出,针对壳体声纳与拖曳线列阵声纳之间测向精度特性差异较大从而影响关联性能的问题,通过方位、能量、demon多特征联合航迹关联算法,相比纯方位航迹关联算法,可有效提高关联度,在关联度判决门限ε不变的情况下,可提高同一目标的关联正确度。
[0097]
(1)设定壳体声纳、拖曳线列阵声纳探测频段([f
kl
,f
ku
]、[f
tl
,f
tu
]),对目标进行被动探测;
[0098]
(2)持续接收壳体声纳、拖曳线列阵声纳输出的全向预成波束数据当出现目标时由操作员进行跟踪处理,输出跟踪目标信息(sgk(t)、sg
t
(t))和波束数据
[0099][0100]
(3)从壳体声纳跟踪目标信息和波束数据中提取目标方位航迹和demon谱特征序列从跟踪目标波束数据和全向预成波束数据中提取目标输出信噪比序列snrk(k),k=1,2,...,l;从拖曳线列阵声纳跟踪目标信息和波束数据中提取目标方位航迹和demon谱特征序列从跟踪目标波束数据和全向预成波束数据中提取目标输出信噪比序列snr
t
(k),k=1,2,...,l;
[0101]
(4)根据方位正切值与时间呈线性关系tanθ=at+b,对目标方位航迹进行拟合处理;
[0102]
(5)接收外部系统输入的环境参数,并依据壳体声纳、拖曳线列阵声纳设定的探测频段,计算得出中心频率点处与1000hz处传播损失的差值1000hz处背景噪
声级(nl
k0
、nl
t0
)、1000hz处基阵增益(di
k0
、di
t0
),根据壳体声纳能量计算公式和拖曳线列阵声纳能量计算公式对壳体声纳与拖曳线列阵声纳探测目标能量进行归一化处理,排除目标本身特性与传播特性的因素之外的影响。
[0103]
(6)将舰艇360
°
方位每隔10
°
划分为一个块集,1号块集:0
°
~10
°
,2号块集:10
°
~20
°
,
……
,36号块集:350
°
~360
°
共36个方位集,将声纳探测目标方位序列数据转化为各方位集序号,每批次关联处理仅针对所选参考航迹所处本块集及左右相邻块集内的目标航迹进行关联。
[0104]
(7)选取壳体声纳的目标方位、能量、demon谱信息作为参考值,拖曳线列阵声纳的目标方位、能量、demon谱信息作为比较值,分别计算方位零阶状态差一阶斜率差和二阶斜率差能量零阶状态差demon谱零阶状态差
[0105]
(8)采用灰度关联算法计算不同目标之间的方位特征关联度计算能量特征关联度和demon谱特征关联度
[0106]
(9)依据潜艇、水面舰艇不同型号声纳系统确定目标方位特征、目标能量特征和目标demon谱特征对目标关联的贡献程度,确定各特征关联度系数λ1、λ2、λ3,由计算得出多特征联合关联度;
[0107]
(10)设定关联度判决门限ε,当γ(αi,βj)≥ε时,壳体声纳航迹αi与拖曳线列阵声纳航迹βj相关联,否则不关联。
[0108]
可以理解的是,对本领域技术人员来说,对本发明的技术方案及发明构思加以等同替换或改变都应属于本发明所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1