地热管道异常状态的大数据定位监测方法、系统及计算机可读介质与流程
1.本发明涉及管道检测技术领域,尤其涉及一种地热管道异常状态的大数据定位监测方法、系统及计算机可读介质。
背景技术:
2.埋地管道不但长期受运行和环境荷载的作用,而且受到材料老化、振动疲劳、腐蚀效应、第三方活动等灾变因素的影响,极易发生损伤破坏。监测管道完整性是管理的重要环节,但是由于埋地管道属于隐蔽工程,巡线检测难度大、效率低,因此发展埋地管道异常状态的实时在线监测技术成为当前的研究热点。
3.目前,管道监测领域引入了分布式光纤传感技术,其通过沿管道布设的光纤传感器来探测侵入介质导致的振幅异常,从而实现定位,属于一种直接的物理监测方法,避免了负压波或泄漏声技术需要进行参数反演的缺陷,具有成本低、响应敏捷的优点。但是,这种方法存在着一定的问题。监测产生大量的振幅时-空大数据,处理该种数据将花费大量时间。
技术实现要素:
4.针对上述缺陷或不足,本发明的目的在于提供一种一种地热管道异常状态的大数据定位监测方法、系统及计算机可读介质。
5.为达到以上目的,本发明的技术方案为:
6.一种地热管道异常状态的大数据定位监测方法,包括以下步骤:
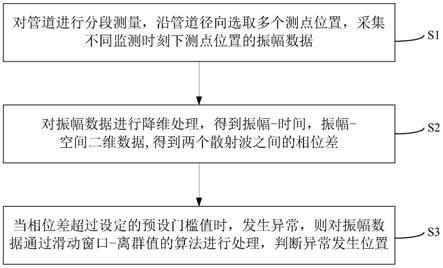
7.1)、对管道进行分段测量,沿管道径向选取多个测点位置,采集不同监测时刻下测点位置的振幅数据;
8.2)、对振幅数据进行降维处理,得到振幅-时间,振幅-空间二维数据,得到两个散射波之间的相位差;
9.3)、当相位差超过设定的预设门槛值时,发生异常,则对振幅数据通过滑动窗口-离群值的算法进行处理,判断异常发生位置。
10.所述步骤2)具体包括:
11.2.1、获取振幅时-空大数据h:
[0012][0013]
其中,h为监测振幅的时-空大数据矩阵,维数为(c+1)
×
m;xi(i=1,2,
…
,m)为沿传感器路径分布的测点位置,共m个测点;tj(j=0,1,
…
,c)为测量时刻,共(c+1)个测量时刻;tc为当前时刻;
[0014]
2.2、获取背向瑞利散射波的振幅e(t):
[0015][0016]
其中,是散射中心的数量,ai是第i个散射波的振幅,a是衰减系数,c是光速,n是折射率,τi是第i个散射波的时间延迟,v是频率,w是脉冲宽度,li是光纤从第i个散射中心到输入端的长度;
[0017]
2.3、通过aom调制对振幅e(t)进行处理,设置调制频率为f,连续注入m个脉冲后,探测器的输入端将得到一个周期为的连续背向散射瑞利波,其幅值表示为e(t'):
[0018][0019]
2.4、获得光功率p(t'):
[0020]
p(t')=|e(t')|2=pa(t')+pb(t')
[0021]
其中,pa(t')表示各独立后向散射中心的光功率总和,pb(t')为具有锯齿状波纹的后向散射瑞利光干涉产生的光功率总和;当锯齿纹波由cos2πv(τ
i-τj)产生时,两个散射波之间的相位差为δ
ij
:
[0022]
δ
ij
=cos2πv(τ
i-τj)=4πvn(l
i-lj)。
[0023]
所述对振幅数据通过滑动窗口-离群值的算法进行处理,判断异常发生位置包括:
[0024]
3.1、设置时间窗口,且设置监测数据的个数s;对发生异常段的任意测点位置的振幅数据进行均值和标准差计算处理;其中,振幅数据计算其均值和标准差t
c-2-s
为任意一时刻,c为当前时刻,s为窗口长度;
[0025]
3.2、对上述的测点位置xi和任意时刻tj(j∈[c-3-s,c-1])的监测数据,计算其对应的非一致性指标,得到非一致性指标的列向量
[0026][0027]
3.3、将窗口时间内的振幅数据服从高斯正态分布处理,且确定分离群值和正常值的界限的离群门槛值
[0028]
3.4、滑动窗口前进至当前时刻tc,将当前时刻的振幅数据计算非一致性指标并将其与门槛值进行对比判断:
[0029]
如果未超过门槛值,则系统为异常状态,窗口tc向前滑动,重复步骤3.1-3.4;
[0030]
如果超过门槛值,则表明tc时刻的监测数据有疑似离群值,窗口不再滑动,进行提醒异常显示。
[0031]
所述确定分离群值和正常值的界限的离群门槛值具体为:
[0032]
将时间窗口内的非一致性指标的列向量按照由大到小的排序,取排列在前a%的作为离群门槛值其中a为设定门槛值的比例系数。
[0033]
如果超过门槛值,则表明tc时刻的监测数据有疑似离群值步骤后,还包括:
[0034]
采用t
c+1
~t
c+k
时刻的监测数据计算非一致性指标,若计算结果均连续性地超过门槛值,则侵入报警,并根据离群值的测点坐标xi确定侵入位置,若仅个别数据超过门槛值,后续计算结果均在群内,则窗口继续向前滑动;其中,所述k为异常状态诊断窗口的采样数,取值小于s。
[0035]
一种地热管道异常状态的大数据定位监测系统,其特征在于,包括采集监控模块、数据处理模块、以及分析模块,其中,
[0036]
所述采集监控模块用于,对管道进行分段测量,沿管道径向选取多个测点位置,采集不同监测时刻下测点位置的振幅数据;
[0037]
所述数据处理模块用于,对振幅数据进行降维处理,得到振幅-时间,振幅-空间二维数据,得到两个散射波之间的相位差;
[0038]
所述分析模块用于,当相位差超过设定的预设门槛值时,发生异常,则对振幅数据通过滑动窗口-离群值的算法进行处理,判断异常发生位置。
[0039]
其特征在于,所述采集监控模块包括:光纤传感器和数据采集模块。
[0040]
一种计算机可读介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现上述方案中任一项所述的地热管道异常状态的大数据定位监测方法。
[0041]
与现有技术比较,本发明的有益效果为:
[0042]
本发明提供了一种地热管道异常状态的大数据定位监测方法、系统及计算机可读介质,在统计模式识别框架下,提出一种基于滑动窗口-离群值分析的振幅时-空大数据分析方法,仅利用分布式振幅监测数据的本身特征即可实现管道异常状态的智能化识别。结果表明:在管道完好的状态下,该方法不会发生误报警的情况,而管道一旦发生泄漏、侵入等异常状态,该方法能够快速识别异常事件,并对异常位置进行精准定位。该方法是一种无监督的人工智能大数据处理方法,在埋地管道异常状态监测中具有良好的应用前景。
附图说明
[0043]
图1是本发明地热管道异常状态的大数据定位监测方法流程图;
[0044]
图2是本发明地热管道异常状态的大数据定位监测方法异常处理图;
[0045]
图3是本发明地热管道异常状态的大数据定位监测系统结构图;
[0046]
图4是本发明地热管道异常状态的大数据定位监测采集模块结构图。
具体实施方式
[0047]
下面将结合附图对本发明做详细描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明的保护范围。
[0048]
如图1所示,一种地热管道异常状态的大数据定位监测方法,包括以下步骤:
[0049]
s1、对管道进行分段测量,沿管道径向选取多个测点位置,采集不同监测时刻下测点位置的振幅数据;
[0050]
本发明中,是采用光纤传感器负责采集数据,数据采集为管道安装及验收完成后,采用分布式光纤监测系统进行管道地下水侵入在线监测,实时获取管道沿途的分布式振幅监测数据。
[0051]
埋地管道地下水侵入分布式光纤监测系统所获得的振幅时-空大数据可以用矩阵形式表示:
[0052][0053]
式中,h为监测振幅的时-空大数据矩阵,维数为(c+1)
×
m;xi(i=1,2,
…
,m)为沿传感器路径分布的测点位置,共m个测点;tj(j=0,1,
…
,c)为测量时刻,共(c+1)个测量时刻;tc为当前时刻。
[0054]
s2、对振幅数据进行降维处理,得到振幅-时间,振幅-空间二维数据,得到两个散射波之间的相位差;
[0055]
该过程具体包括:
[0056]
2.1、获取振幅时-空大数据h:
[0057][0058]
其中,h为监测振幅的时-空大数据矩阵,维数为(c+1)
×
m;xi(i=1,2,
…
,m)为沿传感器路径分布的测点位置,共m个测点;tj(j=0,1,
…
,c)为测量时刻,共(c+1)个测量时刻;tc为当前时刻;
[0059]
2.2、获取背向瑞利散射波的振幅e(t):
[0060][0061]
其中,是散射中心的数量,ai是第i个散射波的振幅,a是衰减系数,c是光速,n是折射率,τi是第i个散射波的时间延迟,v是频率,w是脉冲宽度,li是光纤从第i个散射中心到输入端的长度;
[0062]
2.3、通过aom调制对振幅e(t)进行处理,设置调制频率为f,连续注入m个脉冲后,探测器的输入端将得到一个周期为的连续背向散射瑞利波,其幅值表示为e(t'):
[0063][0064]
2.4、获得光功率p(t'):
[0065]
p(t')=|e(t')|2=pa(t')+pb(t')
[0066]
其中,pa(t')表示各独立后向散射中心的光功率总和,pb(t')为具有锯齿状波纹的后向散射瑞利光干涉产生的光功率总和;当锯齿纹波由cos2πv(τ
i-τj)产生时,两个散射波之间的相位差为δ
ij
:
[0067]
δ
ij
=cos2πv(τ
i-τj)=4πvn(l
i-lj)。
[0068]
需要说明的是,本发明是第一个目的是获取光纤对于监测管道振幅情况的数据。目的是该振幅数据是本发明对于管道异常状态判断的关键数据。具体是通过光纤的瑞利散射原理,由于干扰效应,能检测出光纤不同位置的瑞利散射光,从而得到背向瑞利散射波的振幅。
[0069]
本发明的第二个目的是对振幅时-空数据进行降维处理,将该三维数据降为振幅-时间,振幅-空间这两种二维数据,目的是对数据降维处理,减少其复杂度,方便对该数据进行分析。
[0070]
实现本发明的第二个目的的技术方案是:将采集到的振幅时-空数据构造振幅-时间数据时,舍弃掉空间位置数据,构造振幅-空间数据时,舍弃掉时间数据。
[0071]
s3、当相位差超过设定的预设门槛值时,发生异常,则对振幅数据通过滑动窗口-离群值的算法进行处理,判断异常发生位置。
[0072]
具体处理方法如图2所示,包括:
[0073]
3.1、设置时间窗口,且设置监测数据的个数s;对发生异常段的任意测点位置的振幅数据进行均值和标准差计算处理;其中,振幅数据计算其均值和标准差t
c-2-s
为任意一时刻,c为当前时刻,s为窗口长度;
[0074]
3.2、对上述的测点位置xi和任意时刻tj(j∈[c-3-s,c-1])的监测数据,计算其对应的非一致性指标,得到非一致性指标的列向量
[0075][0076]
3.3、将窗口时间内的振幅数据服从高斯正态分布处理,且确定分离群值和正常值的界限的离群门槛值
[0077]
3.4、滑动窗口前进至当前时刻tc,将当前时刻的振幅数据计算非一致性指标并将其与门槛值进行对比判断:
[0078]
如果未超过门槛值,则系统为异常状态,窗口tc向前滑动,重复步骤3.1-3.4;
[0079]
如果超过门槛值,则表明tc时刻的监测数据有疑似离群值,窗口不再滑动,进行提醒异常显示;
[0080]
所述确定分离群值和正常值的界限的离群门槛值具体为:
[0081]
将时间窗口内的非一致性指标的列向量按照由大到小的排序,取排列在前a%的作为离群门槛值其中a为设定门槛值的比例系数。
[0082]
如果超过门槛值,则表明tc时刻的监测数据有疑似离群值步骤后,还包括:
[0083]
采用t
c+1
~t
c+k
时刻的监测数据计算非一致性指标,若计算结果均连续性地超过门槛值,则侵入报警,并根据离群值的测点坐标xi确定侵入位置,若仅个别数据超过门槛值,后续计算结果均在群内,则窗口继续向前滑动;其中,所述k为异常状态诊断窗口的采样数,取值小于s。
[0084]
另外,如图3所示,本发明还提供了一种地热管道异常状态的大数据定位监测系统,包括采集监控模块1、数据处理模块2、以及分析模块3,其中,
[0085]
所述采集监控模块1用于,对管道进行分段测量,沿管道径向选取多个测点位置,
采集不同监测时刻下测点位置的振幅数据;
[0086]
所述数据处理模块2用于,对振幅数据进行降维处理,得到振幅-时间,振幅-空间二维数据,得到两个散射波之间的相位差;
[0087]
所述分析模块3用于,当相位差超过设定的预设门槛值时,发生异常,则对振幅数据通过滑动窗口-离群值的算法进行处理,判断异常发生位置。
[0088]
需要说明的是,如图4所示,本实施例中所述采集监控模块1包括:光纤传感器和数据采集模块。管道安装及验收完成后,采用分布式光纤监测系统进行管道地下水侵入在线监测,实时获取管道沿途的分布式振幅监测数据。
[0089]
进一步地,本发明还包括一种计算机可读介质,其上存储有计算机程序,该程序被处理器执行时实现上述方案中所述的地热管道异常状态的大数据定位监测方法。
[0090]
对于本领域技术人员而言,显然能了解到上述具体事实例只是本发明的优选方案,因此本领域的技术人员对本发明中的某些部分所可能作出的改进、变动,体现的仍是本发明的原理,实现的仍是本发明的目的,均属于本发明所保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1