一种采用压阻/压电检测的微机械陀螺的制作方法
1.本发明涉及一种微机械陀螺,特别是关于一种采用压阻/压电检测的微机械陀螺。
背景技术:
2.微机械陀螺因具有体积小、重量轻、成本低、功耗小、易集成等优点而有着广泛的市场需求,已应用于工业、农业、汽车、消费电子等民用以及兵器、航天等军用领域。随着应用领域的拓展和使用要求的提高,要求微机械陀螺的体积不断缩小,精度不断提高、环境适应性不断增强,而小体积、精度和环境适应性难以兼顾。
3.现有的微机械陀螺多采用两质量块或四质量块的音叉耦合结构,采用静电激励和电容检测,为提高检测精度,往往需要较大的检测电容,但是大的检测电容一方面要占用较大的芯片面积,从而增大陀螺面积,另一方面大的电容还会引入较大的耦合干扰,无法实现小体积下的高精度要求,而且,电容的增大还会增大运动阻尼,导致品质因子降低而不利于提高陀螺精度;两质量块或四质量块的音叉耦合结构使得非工作模态难以提高,从而难以提高陀螺的环境适应能力。现有的采用压阻检测的微机械陀螺,一方面采用音叉耦合,非工作模态难以提高,从而难以提高陀螺的环境适应能力;另一方面所采用的解耦方式不能很好地实现陀螺两个模态的运动解耦,限制了陀螺性能的提高。现有的四质量微机械陀螺外部采用杠杆耦合,内部采用音叉耦合,该耦合方式不能实现任意两相邻质量块同相模态频率高于反相模态频率,不利于提高陀螺的环境适应性。现有的两质量块或四质量块微机械陀螺,采用了菱形耦合机构,一方面由于采用电容驱动和检测,使得陀螺面积难以减小,另一方面,所采用的耦合方式不能实现任意两相邻质量块同相模态频率高于反相模态频率,不利于提高陀螺的环境适应性。
技术实现要素:
4.本发明要解决的技术问题是克服现有技术存在的不足,提供一种采用压阻/压电检测的微机械陀螺,采用压阻/压电检测,有利于减小陀螺体积,提高精度;采用杠杆耦合检测机构和菱形耦合机构,使得相邻两检测质量块的同相运动模态高于反向运动模态,从而提高陀螺力学环境适应性;压阻/压电检测梁和杠杆相连,可以利用杠杆的放大作用增大压阻/压电梁所受压力,进而提高陀螺灵敏度;杠杆的两端通过外解耦合机构与检测质量块相连,从而可以实现检测质量块较大的运动位移,有利于提高陀螺灵敏度和精度。
5.为解决上述技术问题,本发明提供了一种采用压阻/压电检测的微机械陀螺,包括至少一组杠杆耦合检测机构、检测质量块、外解耦机构、内解耦机构、菱形耦合机构和驱动电容;其中,各组杠杆耦合检测机构、检测质量块、外解耦机构、内解耦机构、菱形耦合机构和驱动电容均相对于陀螺中心线对称分布;
6.所述的杠杆耦合检测机构包括杠杆、柔性铰链、铰链锚点、压阻/压电检测梁和检测梁锚点,所述柔性铰链连接杠杆和铰链锚点,压阻/压电检测梁连接杠杆和检测梁锚点,所述杠杆两端各与一组外解耦机构连接;
7.所述的外解耦机构位于检测质量块的外侧,外解耦机构包括外解耦框架、第一外解耦折叠梁、第二外解耦折叠梁、第三外解耦折叠梁和外解耦锚点,第一外解耦折叠梁连接外解耦框架和检测质量块,第二外解耦折叠梁连接外解耦锚点和外解耦框架,第三外解耦折叠梁连接外解耦框架和杠杆;
8.所述的内解耦机构位于每相邻的两个检测质量块之间,内解耦机构包括内解耦框架、第一内解耦折叠梁、第二内解耦折叠梁和内解耦锚点,内解耦框架和菱形耦合机构相连,第一内解耦折叠梁连接内解耦锚点和内解耦框架,第二内解耦折叠梁连接内解耦框架和检测质量块;
9.所述的菱形耦合机构包括菱形耦合锚点、弯曲梁和菱形机构,弯曲梁连接菱形耦合锚点和菱形机构,菱形机构与内解耦框架连接;
10.所述的驱动电容包括可动梳齿、固定梳齿和梳齿锚点,固定梳齿通过梳齿锚点固定,可动梳齿和外解耦框架相连。
11.所述的柔性铰链由至少两根梁组成,梁的一端连接杠杆,另一端连接铰链锚点;所述压阻/压电检测梁至少有两根,所述的至少两根压阻/压电检测梁相对于柔性铰链对称分布,检测时,一侧的压阻/压电检测梁受压,另一侧的压阻/压电检测梁也受压,从而实现差分检测,有利于提高陀螺性能。
12.本发明由于采取以上技术方案,具有以下优点:
13.1、由于采用压阻/压电检测,压阻/压电检测梁的特征尺寸为10-9
~10-6
m,检测精度随压阻/压电检测梁截面积减小而提高,一方面有利于缩小陀螺体积,提高精度;另一方面,采用压阻/压电检测,检测端电容大大减小,使得通过空间电容耦合的干扰大大减低,从而提高精度;而且采用压阻/压电检测,还可以减小运动时的气体阻尼,提高品质因子,从而提高陀螺精度。
14.2、本发明采用菱形耦合机构与杠杆耦合检测机构组合耦合,使任意相邻两检测质量块的同相运动模态高于反向运动模态,以提高非工作模态频率,从而提高陀螺力学环境适应性。
15.3、本发明由于同时采用的内解耦机构和外解耦机构,使得除科氏加速度引起的运动外,两个模态的运动相互隔离,从而提高陀螺性能。
16.4、由于压阻/压电检测梁与杠杆相连,一方面可以利用杠杆的放大作用增大压阻/压电检测梁所受的压力,提高陀螺灵敏度;另一方面,杠杆的顶端通过外解耦机构与检测质量块相连,可以实现检测质量块较大的运动位移,有利于提高陀螺灵敏度和精度。
17.5、由于各机构相对于陀螺中心线对称分布,有利于减小因加工误差以及温度变化对陀螺性能的影响。
附图说明
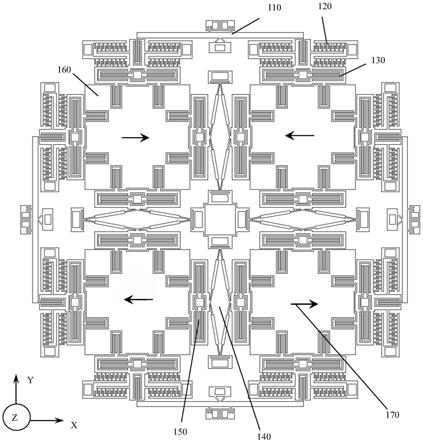
18.图1是本发明的整体结构示意图。
19.图2是本发明的1/4结构示意图。
20.图3是实施例一的杠杆耦合检测机构示意图。
21.图4是实施例二的杠杆耦合检测机构示意图。
22.图5是实施例三的杠杆耦合检测机构示意图。
23.图6是实施例四的杠杆耦合检测机构示意图。
24.图7是实施例五的杠杆耦合检测机构示意图。
25.图8是实施例六的杠杆耦合检测机构示意图。
具体实施方式
26.下面结合附图和实施例对本发明作进一步说明。
27.实施例一
28.一种采用压阻/压电检测的微机械陀螺,如图1—3所示,包括四组杠杆耦合检测机构110、十六组驱动电容120、四组检测质量块160、八组外解耦机构130、八组内解耦机构150和四组菱形耦合机构140;杠杆耦合检测机构110与外解耦机构130相连,外解耦机构130和检测质量块160相连,检测质量块160与内解耦机构150相连,相邻内解耦机构150之间通过菱形耦合机构140相连,上述各机构与驱动电容120通过各自的锚点固定。
29.具体地,每组杠杆耦合检测机构110都包括一根杠杆113、一组柔性铰链111、一个铰链锚点112、两根压阻/压电检测梁114a、114b和两个检测梁锚点115a、115b,压阻/压电检测梁114a、114b的特征尺寸为10-9
~10-6
m,柔性铰链111由两根梁111a、111b组成,梁111a、111b的一端连接杠杆113,另一端连接铰链锚点112,压阻/压电检测梁114a连接杠杆113和检测梁锚点115a,压阻/压电检测梁114b连接杠杆113和检测梁锚点115b,柔性铰链111和铰链锚点112位于杠杆113的一侧,压阻/压电检测梁114a、114b和检测梁锚点115a、115b位于杠杆113的另一侧,压阻/压电检测梁114a、114b相对于柔性铰链111对称分布,所述杠杆113两端分别连接一组外解耦机构130。
30.外解耦机构130包括外解耦框架131、第一外解耦折叠梁132、第二外解耦折叠梁133、第三外解耦折叠梁134和外解耦锚点135,第一外解耦折叠梁132连接外解耦框架131和检测质量块160,第二外解耦折叠梁133连接外解耦锚点135和外解耦框架131,第三外解耦折叠梁134连接外解耦框架131和杠杆113。
31.内解耦机构150包括内解耦框架151、第一内解耦折叠梁152、第二内解耦折叠梁154和内解耦锚点153,第一内解耦折叠梁152连接内解耦锚点153和内解耦框架151,第二内解耦折叠梁154连接内解耦框架151和检测质量块160,内解耦框架151和菱形耦合机构140相连。
32.菱形耦合机构140包括菱形耦合锚点143a、143b、弯曲梁142a、142b和菱形机构141,弯曲梁142a连接菱形耦合锚点143a和菱形机构141,弯曲梁142b连接菱形耦合锚点143b和菱形机构141,菱形机构141与内解耦框架151连接。
33.驱动电容120包括可动梳齿121、固定梳齿122和梳齿锚点123,固定梳齿122通过梳齿锚点123固定,可动梳齿121和外解耦框架131相连。
34.所述的内解耦机构150位于每相邻两个检测质量块160之间,并通过菱形耦合机构140相连。外解耦机构130位于检测质量块160外侧,与相邻检测质量块160相连的外解耦机构130通过第三外解耦折叠梁134与杠杆113相连。
35.所述杠杆耦合检测机构110、驱动电容120、外解耦机构130、检测质量块160、内解耦机构150和菱形耦合机构140相对于陀螺中心线对称分布。
36.如图1所示,上述实施例中,可以采用开环检测或闭环检测两种检测方式。
37.如图1、2所示,本发明在使用时,利用哥氏力来测量物体角速度,固定梳齿122在驱动电压的作用下,对可动梳齿121施加静电力,可动梳齿121带动外解耦机构130,外解耦机构130带动检测质量块160沿x轴振动。其中,任意相邻两检测质量块160的相位相差为180
°
,如箭头170所示。当系统有绕z轴方向角速度输入时,在哥氏力作用下,检测质量块160通过外解耦机构130带动杠杆113绕z轴转动,从而对压阻/压电检测梁114a、114b产生压力或拉力,通过两侧压阻/压电检测梁114a、114b的差分信号即可获得沿z轴方向输入的角速度信息。
38.实施例二
39.本实施例与实施例一相比,区别之处仅在于杠杆耦合检测机构的结构不同,如图4所示,本实施例的杠杆耦合检测机构110包括一根杠杆113、一组柔性铰链111、一个铰链锚点112、两根压阻/压电检测梁114a、114b和两个检测梁锚点115a、115b,柔性铰链111由两根梁111a、111b组成,梁111a、111b的一端连接杠杆113,另一端连接铰链锚点112,压阻/压电检测梁114a连接杠杆113和检测梁锚点115a,压阻/压电检测梁114b连接杠杆113和检测梁锚点115b,柔性铰链111、铰链锚点112、压阻/压电检测梁114a、114b和检测梁锚点115a、115b都位于杠杆113的同一侧,压阻/压电检测梁114a、114b相对于柔性铰链111对称分布,所述杠杆113两端分别连接一组外解耦机构130。
40.实施例三
41.本实施例与实施例一相比,区别之处仅在于杠杆耦合检测机构的结构不同,如图5所示,本实施例的杠杆耦合检测机构110包括一根杠杆113、两组柔性铰链111a、111b、两个铰链锚点112a、112b、两根压阻/压电检测梁114a、114b和两个检测梁锚点115a、115b,柔性铰链111a由两根梁111a、111b组成,梁111a、111b的一端连接杠杆113,另一端连接铰链锚点112a。柔性铰链111b由两根梁111c、111d组成,梁111c、111d的一端连接杠杆113,另一端连接铰链锚点112b。压阻/压电检测梁114a连接杠杆113和检测梁锚点115a,压阻/压电检测梁114b连接杠杆113和检测梁锚点115b,柔性铰链111a、铰链锚点112a位于杠杆113的一侧,柔性铰链111b、铰链锚点112b、压阻/压电检测梁114a、114b和检测梁锚点115a、115b都位于杠杆113的另一侧,压阻/压电检测梁114a、114b相对于柔性铰链111b对称分布,所述杠杆113两端分别连接一组外解耦机构130。
42.实施例四
43.本实施例与实施例一相比,区别之处仅在于杠杆耦合检测机构的结构不同,如图6所示,本实施例的杠杆耦合检测机构110包括一根杠杆113、两组柔性铰链111a、111b、两个铰链锚点112a、112b、四根压阻/压电检测梁114a、114b、114c、114d和四个检测梁锚点115a、115b、115c、115d,柔性铰链111a由两根梁111a、111b组成,梁111a、111b的一端连接杠杆113,另一端连接铰链锚点112a。柔性铰链111b由两根梁111c、111d组成,梁111c、111d的一端连接杠杆113,另一端连接铰链锚点112b。压阻/压电检测梁114a连接杠杆113和检测梁锚点115a,压阻/压电检测梁114b连接杠杆113和检测梁锚点115b,压阻/压电检测梁114c连接杠杆113和检测梁锚点115c,压阻/压电检测梁114d连接杠杆113和检测梁锚点115d,柔性铰链111a、铰链锚点112a、压阻/压电检测梁114a、114b和检测梁锚点115a、115b位于杠杆113的一侧,柔性铰链111b、铰链锚点112b、压阻/压电检测梁114c、114d和检测梁锚点115c、115d都位于杠杆113的另一侧,压阻/压电检测梁114a、114b相对于柔性铰链111a对称分布,
压阻/压电检测梁114c、114d相对于柔性铰链111b对称分布,所述杠杆113两端分别连接一组外解耦机构130。
44.实施例五
45.本实施例与实施例一相比,区别之处仅在于杠杆耦合检测机构的结构不同,如图7所示,本实施例的杠杆耦合检测机构110包括一根杠杆113、一组柔性铰链111、一个铰链锚点112、四根压阻/压电检测梁114a、114b、114c、114d和四个检测梁锚点115a、115b、115c、115d,所述的杠杆113中间部位具有“口”字形结构,铰链锚点112位于“口”字形结构的中心,柔性铰链111由四根梁111a、111b、111c、111d组成,梁111a、111b、111c、111d的一端连接铰链锚点112,另一端分别与“口”字形结构的四个边连接,其中梁111a和111c与杠杆平行,梁111b和111d与杠杆垂直,压阻/压电检测梁114a连接杠杆113和检测梁锚点115a,压阻/压电检测梁114b连接杠杆113和检测梁锚点115b,压阻/压电检测梁114c连接杠杆113和检测梁锚点115c,压阻/压电检测梁114d连接杠杆113和检测梁锚点115d,压阻/压电检测梁114a、114b和检测梁锚点115a、115b位于杠杆113的一侧,压阻/压电检测梁114c、114d和检测梁锚点115c、115d都位于杠杆113的另一侧,压阻/压电检测梁114a、114b、114c、114d相对于柔性铰链111对称分布,所述杠杆113两端分别连接一组外解耦机构130。
46.实施例六
47.本实施例与实施例一相比,区别之处仅在于杠杆耦合检测机构的结构不同,如图8所示,本实施例的杠杆耦合检测机构110包括一根杠杆113、一组柔性铰链111、四个铰链锚点112a、112b、112c、112d、四根压阻/压电检测梁114a、114b、114c、114d和四个检测梁锚点115a、115b、115c、115d,所述的杠杆113中间部位具有“目”字形结构,铰链锚点112a、112b位于“目”字形结构的中间格内,铰链锚点112c位于“目”字形结构的左侧格内,铰链锚点112d位于“目”字形结构的右侧格内,柔性铰链111由四根梁111a、111b、111c、111d组成,其中梁111a和111b与杠杆垂直,梁111c和111d与杠杆平行,梁111a一端连接铰链锚点112a,另一端与“目”字形结构的底边连接,梁111b一端连接铰链锚点112b,另一端与“目”字形结构的顶边连接,梁111c一端连接铰链锚点112c,另一端与“目”字形结构的左侧边连接,梁111d一端连接铰链锚点112d,另一端与“目”字形结构的右侧边连接,压阻/压电检测梁114a连接杠杆113和检测梁锚点115a,压阻/压电检测梁114b连接杠杆113和检测梁锚点115b,压阻/压电检测梁114c连接杠杆113和检测梁锚点115c,压阻/压电检测梁114d连接杠杆113和检测梁锚点115d,梁111a、铰链锚点112a、压阻/压电检测梁114a、114b和检测梁锚点115a、115b位于杠杆113的一侧,梁111b、铰链锚点112b、压阻/压电检测梁114c、114d和检测梁锚点115c、115d都位于杠杆113的另一侧,压阻/压电检测梁114a、114b、114c、114d相对于柔性铰链111对称分布,所述杠杆113两端分别连接一组外解耦机构130。
48.以上所述仅是本发明的最佳实施方式。应当指出,对于本领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明的技术方案进行若干变形或者等同替换,也能达到本发明的技术效果,也应视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1