高超声速火箭橇全速域高精度远距离测速方法
1.本发明属于雷达技术与高超声速火箭橇测试方法技术领域,具体涉及一种高超声速火箭橇全速域高精度远距离测速方法。
背景技术:
2.高超声速火箭橇系统滑轨长达十几公里,由多级助推火箭加速和推进,将橇载被试品加速到高超声速,模拟被试品在高超声速环境下的飞行状态,从而采集被试品在高超声速状态时的气动、控制、振动以及毁伤能力等多项指标,是高超声速武器设计、试验和鉴定等获取数据的主要手段,是在地面验证新型高超市速武器系统重要的仿真试验平台。高精度速度测量是高超声速火箭橇系统最基本和最重要的技术要求。多普勒测速雷达具有非接触、测量准确,实时性好的特点,是火箭橇测速的主要手段。
3.高超声速火箭橇试验由于被试品是高速目标,需要加速距离长,火箭橇速度快,无法通过刹车停下来,被试品通常不回收,因此无法在轨道终点架设雷达测量,只能采用雷达追尾测量法。追尾测量方式是将雷达架设在火箭橇起始点尾部安全距离,火箭橇由近及远进行测量,可适用于所有类型的火箭橇试验要求,是目前最常用的测量方式。
4.多普勒雷达追尾测量高超声速火箭橇有两个难点:第一,火箭尾焰严重衰减雷达信号。火箭喷射的高温尾焰会对空气进行电离,对微波信号能量衰减可达几十分贝(频率越高衰减越大),严重衰减了雷达发射功率和回波功率。高超声速火箭橇采用多级火箭分段加速方式,一级助推火箭加速完成后分离,后续火箭继续点火加速,整个过程火箭点火时间长,造成雷达检测威力和精度大幅度降低。第二,测量距离远,雷达威力要求高。高超声速火箭橇整个测量距离远大于常规火箭橇,尾焰和远距离双重因素叠加导致常规的多普勒雷达无法满足测量要求。
技术实现要素:
5.本发明的目的在于提供一种高超声速火箭橇全速域高精度远距离测速方法,解决了现有多普勒雷达检测威力和精度无法满足测量要求的问题。
6.本发明所采用的技术方案是:高超声速火箭橇全速域高精度远距离测速方法,包括以下步骤:
7.步骤1、将多普勒测速雷达正对滑轨架设在火箭橇起始点后方安全距离处,在火箭橇最末级安装设有天线的信标仪;
8.步骤2、将信标仪的天线朝向火箭橇尾部并正对雷达天线,使雷达天线与信标仪的天线组成的上下行测量链路处于极化正交状态;
9.步骤3、雷达开机并发射功率,将雷达采集火箭橇点火时刻作为时间0点,信标仪在运动过程中实时接收雷达发射信号,经自适应放大后通过天线进行转发,转发信号通过空间传播后被雷达接收天线进行接收、放大和检测,完成测量过程。
10.本发明的特点还在于,
11.步骤1中将雷达的发射或接收天线旋转90
°
安装用以实现雷达收发天线极化正交。
12.步骤1中的信标仪包括放大链路,放大链路的输入端连接有信标仪接收天线,放大链路的输出端连接有信标仪发射天线。
13.放大链路包括与信标仪接收天线连接的限幅器,限幅器与信标仪发射天线之间连接有增益可控低噪声放大器,增益可控低噪声放大器的输出端还依次通过定向耦合器、射频检波器和运算放大器连接至输入端。
14.信标仪接收天线和信标仪发射天线均采用垂直化极小型微带阵列天线且并联中间馈电宽波束体制;信标仪接收天线和信标仪发射天线的方位和俯仰两维阵元数量相同,方位和俯仰波束宽度相同。
15.信标仪接收天线和信标仪发射天线的外形均为正方形。
16.步骤2中的信标仪接收天线和雷达的发射天线极化相同,信标仪发射天线和雷达的接收天线极化相同。
17.本发明的有益效果是:本发明的高超声速火箭橇全速域高精度远距离测速方法,通过多普勒雷达联合小型化橇载信标仪,组成一个二次雷达系统,通过信标仪为雷达增强回波信号,解决了常规多普勒雷达对高超声速火箭橇远距离高精度测速的难题,具有实现简单、成本低,可靠性高,测量准确等优点。如果雷达端还有一个与雷达发射天线极化相同的接收天线,就能够实现一次雷达和二次雷达同时工作而且不相互影响的应用场景。
附图说明
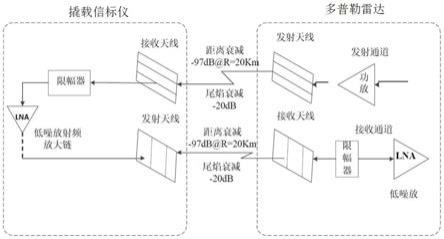
18.图1是本发明的高超声速火箭橇全速域高精度远距离测速方法的工作原理示意图;
19.图2是本发明的高超声速火箭橇全速域高精度远距离测速方法中信标仪的组成及工作原理示意图。
具体实施方式
20.下面结合附图以及具体实施方式对本发明进行详细说明。
21.本发明提供了一种高超声速火箭橇全速域高精度远距离测速方法,如图1和图2所示。
22.目前,多普勒雷达都采用收发双天线点频连续波测量体制,天线采用线性极化,只需将发射或接收天线旋转90
°
安装,即可实现收发天线极化正交;或者是在接收天线前端增加极化旋转器件,也可实现收发天线极化的正交。
23.橇载信标仪天线采用垂直化极小型微带阵列天线,并联中间馈电宽波束体制,方位和俯仰两维阵元数量相同,方位和俯仰波束宽度相同。外形优选为正方形,便于左右旋转或者对称安装,旋转不会改变结构孔位。因此只需将任意天线旋转90
°
,天线就可改变为与垂直极化正交的水平极化天线,使用时可根据多普勒雷达天线极化形式灵活配置,形成正交极化状态。正交收发天线之间同时增加隔离板和吸波材料,保证隔离度不小于80db。信标仪放大链采用串联低噪声放大器方式,整个电路噪声系数小于3db,接收电路前端设有限幅器,防止大功率对微波器件的损坏,放大链路设计有闭环自动增益控制电路,可采用相同形式的增益可控低噪声放大器4级串联组成,增益控制电路(agc)通过定向耦合器、检波器和
放大器组成负反馈控制电路,检测自身输出功率大小,根据输出功率大小自动闭环调节低噪放的增益,每一级低噪放功能都相同且最大输出被限定在0dbm
±
3db,可保证整个放大链路始终处于线性放大状态。输出功率稳定控制在0dbm
±
3db范围内,且经空间隔离后耦合到信标仪接收天线功率都小于火箭橇在20km处接收到的最小的雷达发射信号,保证不会出现自激现象。如果信标仪输入信号较大,第一级低噪放检测到大信号后会自动降低增益或者无增益输出,后续链路上的低噪放都会检测到这个较大输入信号并自动降低增益,大的输入信号不会被持续放大,并被控制在一定的输出范围内;如果信标仪输入信号很小,放大链路上每一级低噪放都会最大增益放大信号,使输入小信号得到充分的放大并输出;如果信标仪输入信号处于中等功率状态,则放大链路前端的低噪放处于较大增益放大区间将信号放大,而处于链路末端的低噪放输入变大,会自动降低增益输出,保证信标仪转发功率在恒定一个动态范围内。
24.在实际测量时,多普勒测速雷达正对滑轨架设在火箭橇起始点后方安全距离处,在火箭橇最末级牢固安装信标仪,信标仪天线朝向火箭橇尾部正对雷达天线,整个上下行测量链路处于极化正交状态。雷达开机并发射功率,等待火箭橇点火,雷达采集火箭橇点火时刻作为时间0点,橇载信标仪在运动过程中实时接收雷达发射信号,经自适应放大后通过发射天线进行转发,转发信号通过空间传播后被雷达接收天线进行接收、放大和检测,完成整个测量过程。
25.本发明的实现原理是:将常规的连续波多普勒测速雷达收发天线处于极化正交方式,并在火箭橇上加载射频转发式信标仪,信标仪接收天线和雷达发射天线极化相同,信标仪发射天线和雷达接收天线极化相同,信标仪接收雷达发射信号并经过放大后回传给雷达接收天线,信标仪放大的信号可有效抵消助推火箭尾焰以及远距离探测引起的信号衰减,实现常规小型多普勒雷达对远程超高速火箭橇全程测量都处于较高的检测信噪比,提高了雷达检测威力和测速精度。
26.采用极化正交方式,使得测量收发链路的极化相互匹配,从而获得最大的功率传输又互不影响,能够在雷达端和信标仪端都获得了最优的空间隔离度,可以有效避免收发干扰、自激等现象。雷达端能够减小发射信号泄漏对接收信号的影响,能够扩展目标在低速段时的检测能力:信标仪端也能够获得最大增益和功率输出,从而使雷达能够获得更好的检测信噪比,实现最优的检测,参见图1。
27.橇载信标仪采用射频直接放大转发方式,无变频、延迟等环节,收发天线和元器件可根据雷达频率自主选择,可适用于x~ka波段的多普勒测速雷达。射频接收放大链路设计有限幅保护和放大自动增益控制(agc)功能,能够根据雷达发射功率以及火箭橇与雷达距离远近自动调节放大链路增益,保证信标仪转发功率在恒定一个动态范围内,参见图2。
28.通过上述方式,本发明的高超声速火箭橇全速域高精度远距离测速方法,通过多普勒雷达联合小型化橇载信标仪,组成一个二次雷达系统,通过信标仪为雷达增强回波信号,解决了常规多普勒雷达对高超声速火箭橇远距离高精度测速的难题,具有实现简单、成本低,可靠性高,测量准确等优点。如果雷达端还有一个与雷达发射天线极化相同的接收天线,就能够实现一次雷达和二次雷达同时工作而且不相互影响的应用场景。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1