一种基于LSTM的光纤陀螺标度因数误差补偿方法
一种基于lstm的光纤陀螺标度因数误差补偿方法
技术领域
1.本发明涉及传感器测试技术领域,具体涉及一种基于lstm的光纤陀螺标度因数误差补偿方法。
技术背景
2.光纤陀螺是一种基于sagnac效应的角速度传感器,具有可靠性高、启动时间短、动态范围大、全固态、成本低等优点,已广泛应用于飞机、导弹、汽车、机器人等领域。在大多数情况下,光纤陀螺标度因数被认为是恒定值。然而在实际使用过程中,光纤陀螺的标度因数很容易受到许多因素的影响,与出场标定时的数值存在差异,进而影响实际使用时的性能。目前已知光纤陀螺在输入角速率不同的情况下标度因数也存在差异,尤其是在输入角速率较小的情况下,测量输出会出现较明显的误差,此外由于光纤陀螺内部的光电器件很容易受温度影响,导致标度因数在不同温度下也存在明显差异。
3.传统标度因数标定方法分别对温度和输入角速率进行标定。即选取不同的温度点,通过测量不同输入角速率情况下光纤陀螺的输出,进行分段法或多项式拟合,获得光纤陀螺标度因数的误差模型,可以实现了对标度因数的补偿,但并未考虑角速率和温度对标度因数的耦合影响。并且,离散的标定方案需要在每个温度点温度保持较长时间,标定时间较长且有效温度信息较少。
技术实现要素:
4.为了解决现有光纤陀螺标度因数误差补偿方法的不足,本发明提供了一种基于lstm的光纤陀螺标度因数误差补偿方法,针对角速率和温度对标度因数的耦合影响,设计了在连续温度点和速率点下的标定实验,只需进行一组实验即可获得连续温度点和速率点下的光纤陀螺输出数据,大幅缩短了标定时间的同时提高了标定精度。本发明解决上述技术问题是通过如下技术方案予以实现的:
5.一种基于lstm的光纤陀螺标度因数误差补偿方法,步骤如下:
6.1)将光纤陀螺安装在温箱内的转台上,使得光纤陀螺的敏感轴平行于转台的旋转轴;
7.2)设定温箱的初始温度,光纤陀螺上电并稳定一段时间,然后控制温箱以一定的变温速率升温或者降温,同时控制转台以变速度转动,为光纤陀螺提供变化的输入角速率;所述的升温或者降温的范围为光纤陀螺正常工作下的全温度范围;
8.3)采集光纤陀螺输出f,以及对应的实时温度t和输入角速率ω,计算不同输入角速率和温度下的标度因数值k(t,ω):
[0009][0010]
式中,f0(t)为温度函数的零偏模型,k(.)为光纤陀螺标度因数;
[0011]
实验结束后,得到一组样本数据{f,t,ω,k(t,ω)};
[0012]
4)建立lstm神经网络,将样本数据中的{f,t}作为lstm神经网络的输入序列,将样本数据中的{ω,k(t,ω)}作为输出序列,对lstm神经网络进行训练,将训练好的lstm神经网络作为光纤陀螺的标度因数模型;
[0013]
5)在光纤陀螺的实际工作过程中,采集工作过程中的实时温度t和光纤陀螺输出f,并作为光纤陀螺的标度因数模型的输入,得到光纤陀螺在不同输入角速率ω下的标度因数。
[0014]
进一步的,步骤2)中测试的温度区间为60℃~-40℃,初始温度为60℃,变温速率为-1℃/min。
[0015]
进一步的,所述的转台输入角速率变化规则如下:
[0016]
转台输入角速率由反转角速率-m
°
/s以a
°
/s2的角加速度变化至正转角速率m
°
/s,保持1-20s;然后以-a
°
/s2的角加速度变化至反转角速率-m
°
/s,保持1-20s;重复该过程,直至温度从初始温度升温或者降温至最终温度。
[0017]
进一步的,所述的角加速度为10
°
/s2或-10
°
/s2。
[0018]
进一步的,所述的输入角速率范围为-300
°
/s~300
°
/s。
[0019]
进一步的,所述的lstm神经网络采用双层lstm结构。
[0020]
本发明与现有技术相比的优点在于:本发明提供了一种基于lstm的光纤陀螺标度因数误差补偿方法,研究了角速率和温度对标度因数的耦合影响,并设计在连续温度点和速率点下的标定实验,只需进行一组实验即可获得连续温度点和速率点下的光纤陀螺输出数据。实验结果表明,本发明相比于传统的离散式标定方案,大幅缩短了标定时间的同时提高了标定精度,提高了光纤陀螺在不同温度和输入角速率下的表现。
附图说明
[0021]
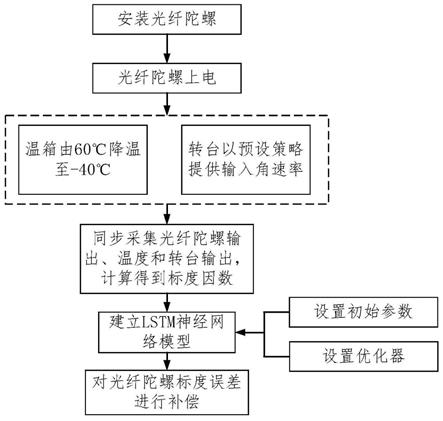
图1是本实施例标度因数误差补偿流程图;
[0022]
图2是本实施例标定方案中温度和输入角速率的变化曲线;
[0023]
图3是本实施例中标度因数误差随温度和输入角速率的变化曲线;
[0024]
图4是本实施例中标度因数误差补偿后结果;
具体实施方式
[0025]
下面结合附图对本发明的技术方案做进一步详细说明。
[0026]
如图1所示,本发明设计了在连续温度点和速率点下的标定实验,只需进行一组实验即可获得连续温度点和速率点下的光纤陀螺输出数据,具体包括以下步骤:
[0027]
(1)将光纤陀螺安装于温箱内的转台上,使得光纤陀螺的敏感轴与转台旋转轴平行;
[0028]
(2)进行连续温度点和速率点下的光纤陀螺标度因数标定实验,具体步骤如下:
[0029]
(2-1)温箱初始温度保持在60℃,陀螺上电;
[0030]
(2-2)陀螺上电半小时后,陀螺内部充分保温。之后,控制温箱以指定变温速率降温至-40℃,本实施例中,变温速率设置为-1℃/min,温度变化曲线如图2中的实线所示;与此同时,转台提供变化的输入角速率,输入角速率曲线如图2中的虚线所示;陀螺在动态变化的温度及输入角速度下进行工作,将其输出量记为f。
[0031]
本实施例中,转台输入角速率变化规则如下:
[0032]
(2-2-1)转台输入角速率由反转角速率300
°
/s以10
°
/s2的角加速度变化至正转角速率300
°
/s;
[0033]
(2-2-2)转台保持在正转角速率300
°
/s下10秒;
[0034]
(2-2-3)转台输入角速率由正转角速率300
°
/s以-10
°
/s2的角加速度变化至反转角速率300
°
/s;
[0035]
(2-2-4)转台保持在反转角速率300
°
/s下10秒;
[0036]
(2-2-5)重复以上步骤,直至温度降温至-40℃。
[0037]
(3)同步采集光纤陀螺温度t、光纤陀螺输出f和转台的输入角速率ω,计算出不同输入角速率和温度下的标度因数值k(t,ω);
[0038]
计算光纤陀螺标度因数的公式为:
[0039][0040]
式中,f0(t)为温度函数的零偏模型,k(.)为光纤陀螺标度因数。
[0041]
不同输入角速率和温度下的标度因数值如图3所示,可以清楚地看到,光纤陀螺标度因数与角速率的关系呈现明显的双曲线趋势,当角速率输入很小时,标度因数存在明显的误差,标度因数随着温度的升高而增大。
[0042]
(4)利用不同输入角速率和温度下的标度因数值训练lstm神经网络以确定超参数,在训练过程中,所述lstm神经网络的输入为光纤陀螺温度t和光纤陀螺输出f,lstm神经网络的输出为光纤陀螺在不同输入角速率ω下的标度因数;训练结束后获得光纤陀螺的标度因数模型。
[0043]
所述lstm神经网络由遗忘门、输入门和输出门三部分组成,具体计算过程如下:
[0044]ft
=σg(wfx
t
+ufh
t-1
+bf)
[0045]it
=σg(wix
t
+u
iht-1
+bi)
[0046][0047][0048]ot
=σg(wox
t
+u
oht-1
+bo)
[0049][0050]
式中,x
t
为输入序列,即光纤陀螺温度t和光纤陀螺输出f;h
t
为输出序列,即光纤陀螺在不同输入角速率ω下的标度因数;f
t
为遗忘门;i
t
和构成输入门;o
t
为输出门;c
t
为记忆细胞状态;w和u为权重矩阵;b为偏差向量;σg为sigmod激活函数;σh为双曲正切函数。
[0051]
本实施例中,所述lstm神经网络相关参数为:两层lstm结构,1个全连接层;两层lstm各有50个lstmcell单元,初始学习率0.03,优化器采用自适应矩估计优化器adam,可以根据训练过程中的梯度对学习率进行动态调整;dropout层添加在全连接层上,根据设定的比率值随机为网络中神经元赋值零权重,避免过拟合。
[0052]
(5)利用步骤4得到的模型对光纤陀螺标度因数进行补偿,补偿效果如图4所示,光纤陀螺标度因数误差由280ppm下降至13ppm,可以看到补偿效果明显。
[0053]
本发明的技术内容及技术特征已揭示如上,然而熟悉本领域的技术人员仍可能基
于本发明的启示而作种种不背离本发明精神的替换和修饰,因此,本发明保护范围应不限于实施例所揭示的内容,实际保护范围以权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1