一种农田土壤采样机器人
1.本发明属于土壤采样技术领域,尤其涉及一种农田土壤采样机器人。
背景技术:
2.农业是利用动植物的生长发育规律,通过人工培育来获得产品的产业,农业也是第一产业,其中农田是农业中不可或缺的组成部分,因此农田土壤中各个元素的含量也时刻影响农业的发展。对此需要对农田土壤进行采样检测,时刻了解农田土壤中各个元素的含量。
3.土壤采样是指采集土壤样品的方法,包括采样的布设和取样技术。随着科技和经济的急速发展,土壤采样再也不是依靠人力随机进行采样,农田土壤采样机器人等采样设备应运而生。
4.现有的农田土壤采样机器人在使用采样管采完样且从土壤内提升到一定高度后,才推动采样盒对采样管内的土壤进行采样收集,这样的设置会导致采样不及时,降低土壤采样的效率,增加了经济成本。
5.因此,针对以上现状,迫切需要开发一种农田土壤采样机器人,以克服当前实际应用中的不足。
技术实现要素:
6.针对现有技术存在的不足,本发明实施例的目的在于提供一种农田土壤采样机器人,以解决上述背景技术中的问题。
7.为实现上述目的,本发明提供如下技术方案:一种农田土壤采样机器人,包括机器箱体,所述机器箱体上安装有驱动元件、安装架以及行走机构,还包括:采样机构,所述采样机构包括升降模块、采样模块和取样模块,所述升降模块安装在采样架上,且所述升降模块的输出端与采样模块相连接,所述采样模块与采样架滑动连接,所述取样模块分别与采样模块和采样架活动连接;所述取样模块包括连接座、转动单元和取样盒,所述连接座分别固定在采样架和采样模块上,所述取样盒安装在转动单元上;所述转动单元包括第一转动件、第二转动件、第三转动件和第四转动件,所述第一转动件的两端分别与安装在采样模块上的连接座和第二转动件转动连接,且所述第一转动件与第三转动件相连,所述第二转动件与取样盒转动连接,所述第三转动件的两端分别与安装在采样架上的连接座和第四转动件转动连接,所述第四转动件与取样盒转动连接;升降模块驱动采样模块在采样架上进行升降的同时,采样模块也带动第一转动件进行转动,第一转动件带动第二转动件和第三转动件进行转动,第三转动件带动第四转动件在取样盒上转动并且配合第二转动件带动取样盒在采样架内移动的方式,实现了取样盒的及时取样。
8.作为本发明进一步的技术方案,所述升降模块包括第一动力元件和连接架,所述第一动力元件固定在采样架上,且所述第一动力元件的输出端贯穿采样架并且与连接架相连,所述连接架与采样模块相连。
9.作为本发明进一步的技术方案,所述采样模块包括第二动力元件、采样管和支架,所述支架的两端与采样架滑动连接,且所述支架与连接架固定连接,所述第二动力元件固定在支架上,所述第二动力元件的输出端贯穿支架并且与采样管相连接,所述采样管和支架上安装有用于对采样模块进行缓震的缓震机构。
10.作为本发明进一步的技术方案,所述机器箱体上安装有控制机构和稳定机构,所述控制机构用于对采样架的位置和角度进行控制,所述稳定机构用于控制机器箱体在采样时的稳定。
11.作为本发明进一步的技术方案,所述控制机构包括第一控制模块、第二控制模块和第三控制模块,所述第一控制模块包括第一齿轮和第一调节件,所述第一齿轮活动安装在安装架上,且所述第一齿轮与驱动元件的输出端相连,所述第一调节件与第一齿轮固定连接。
12.作为本发明进一步的技术方案,所述第二控制模块包括第二齿轮、第一传动单元和第二调节件,所述第二齿轮活动安装在安装架上,且所述第二齿轮与驱动元件的输出端相连,所述第一传动单元活动安装在第一调节件上,且所述第二齿轮与第一传动单元啮合传动,所述第二调节件固定安装在第一传动单元的一端。
13.作为本发明进一步的技术方案,所述第三控制模块包括第三齿轮和第二传动单元,所述第三齿轮活动安装在安装架上,且所述第三齿轮与驱动元件的输出端相连,所述第二传动单元分别活动安装在第一调节件和第二调节件上,所述第二传动单元与第三齿轮啮合传动,且所述第二传动单元的一端与采样架固定连接。
14.作为本发明进一步的技术方案,所述行走机构包括移动模块、平衡支撑和固定件,所述平衡支撑通过固定件活动安装在机器箱体的两侧壁上,所述移动模块活动安装在平衡支撑上,且所述移动模块与驱动元件的输出端相连接。
15.作为本发明进一步的技术方案,所述缓震机构包括连接套、连接件和弹性件,所述连接套固定在采样管上,所述连接件的两端分别与连接套和支架活动连接,所述弹性件套装在连接件上。
16.作为本发明进一步的技术方案,所述稳定机构包括支臂、第三动力元件和支腿,所述支臂固定在机器箱体的侧壁上,所述第三动力元件安装在支臂上,且所述第三动力元件的输出端贯穿支臂并且与支腿相连接。
17.与现有技术相比,本发明的有益效果是:第一动力元件驱动连接架在采样架内进行上下移动,连接架带动支架在采样架上进行上下移动的同时,也带动取样模块在支架和采样架上进行移动;第二动力元件通过驱动采样管在支架上进行转动的方式实现了采样模块对土壤进行采样;支架带动第一转动件进行转动,第一转动件带动第二转动件和第三转动件进行转动,第三转动件带动第四转动件进行转动,第三转动件带动第四转动件在取样盒上转动并且配合第二转动件带动取样盒在采样架内移动的方式,实现了取样盒的及时取样;当采样模块进行下降采样的同时,支架带动取样模块向左进行移动,方便采样模
块对土壤进行采样;当采样模块采样完毕向上提升时,支架带动取样模块向右进行移动,使得取样盒及时对采样管内的土壤进行收集,提高了机器人土壤采样的工作效率。
18.为更清楚地阐述本发明的结构特征和功效,下面结合附图与具体实施例来对本发明进行详细说明。
附图说明
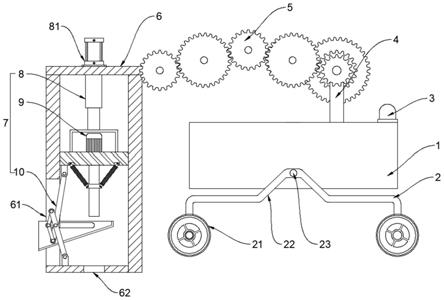
19.图1为本发明实施例提供的农田土壤采样机器人的整体结构示意图。
20.图2为图1中采样机构的结构示意图。
21.图3为图1中控制机构的结构示意图。
22.图4为图2中缓震机构的结构示意图。
23.图5为本发明实施例提供的农田土壤采样机器人中稳定机构的结构示意图。
24.附图标记:1-机器箱体,2-行走机构,21-移动模块,22-平衡支撑,23-固定件,3-驱动元件,4-安装架,5-控制机构,51-第一控制模块,511-第一齿轮,512-第一调节件,52-第二控制模块,521-第二齿轮,522-第一传动单元,523-第二调节件,53-第三控制模块,531-第三齿轮,532-第二传动单元,6-采样架,7-采样机构,8-升降模块,81-第一动力元件,82-连接架,9-采样模块,91-第二动力元件,92-采样管,93-支架,10-取样模块,101-连接座,102-转动单元,1021-第一转动件,1022-第二转动件,1023-第三转动件,1024-第四转动件,103-取样盒,11-缓震机构,111-连接套,112-连接件,113-弹性件,12-稳定机构,121-支臂,122-第三动力元件,123-支腿。
具体实施方式
25.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
26.以下结合具体实施例对本发明的具体实现进行详细描述。
27.如图1至3所示,作为本发明一个实施例提供的一种农田土壤采样机器人,包括机器箱体1,所述机器箱体1上安装有驱动元件3、安装架4以及行走机构2,还包括:采样机构7,所述采样机构7包括升降模块8、采样模块9和取样模块10,所述升降模块8安装在采样架6上,且所述升降模块8的输出端与采样模块9相连接,所述采样模块9与采样架6滑动连接,所述取样模块10分别与采样模块9和采样架6活动连接;所述取样模块10包括连接座101、转动单元102和取样盒103,所述连接座101分别固定在采样架6和采样模块9上,所述取样盒103安装在转动单元102上;所述转动单元102包括第一转动件1021、第二转动件1022、第三转动件1023和第四转动件1024,所述第一转动件1021的两端分别与安装在采样模块9上的连接座101和第二转动件1022转动连接,且所述第一转动件1021与第三转动件1023相连,所述第二转动件1022与取样盒103转动连接,所述第三转动件1023的两端分别与安装在采样架6上的连接座101和第四转动件1024转动连接,所述第四转动件1024与取样盒103转动连接;升降模块8驱动采样模块9在采样架6上进行升降的同时,采样模块9也带动第一转动件1021进行转动,第一转动件1021带动第二转动件1022和第三转动件1023进行转动,第
三转动件1023带动第四转动件1024在取样盒103上转动并且配合第二转动件1022带动取样盒103在采样架6内移动的方式,实现了取样盒6的及时取样。
28.在本实施例中,升降模块8驱动采样模块9进行升降,当采样模块9进行下降采样的同时,采样模块9带动取样模块10向左进行移动,方便采样模块9对土壤进行采样;当采样模块9采样完毕向上提升时,采样模块9带动取样模块10向右进行移动,使得取样模块10及时对采样模块9内的土壤进行收集,提高了机器人土壤采样的工作效率。
29.在一个优选的实施例中,所述第一转动件1021、第二转动件1022、第三转动件1023和第四转动件1024均优先采用的是一种转杆结构,所述取样盒103优先采用的是一种带有斜坡的取样盒103,方便检测人员对取样盒103内的土壤进行收集。
30.如图1和2所示,作为本发明的一种优选实施例,所述升降模块8包括第一动力元件81和连接架82,所述第一动力元件81固定在采样架6上,且所述第一动力元件81的输出端贯穿采样架6并且与连接架82相连,所述连接架82与采样模块9相连。
31.如图1和2所示,作为本发明的一种优选实施例,所述采样模块9包括第二动力元件91、采样管92和支架93,所述支架93的两端与采样架6滑动连接,且所述支架93与连接架82固定连接,所述第二动力元件91固定在支架93上,所述第二动力元件91的输出端贯穿支架93并且与采样管92相连接,所述采样管92和支架93上安装有用于对采样模块9进行缓震的缓震机构11。
32.在本实施例中,第一动力元件81驱动连接架82在采样架6内进行上下移动,连接架82带动支架93在采样架6上进行上下移动,第二动力元件91通过驱动采样管92在支架93上进行转动的方式实现了采样模块9对土壤进行采样。
33.在一个优选的实施例中,所述第一动力元件81优先采用的是一种液压式伸缩缸和伸缩杆,也可采用满足条件的气动式伸缩缸和伸缩杆;所述第二动力元件91优先采用的是一种满足条件的电机;所述采样管92优先采用的是一种带有土壤采样槽的中空结构。
34.如图1至5所示,作为本发明的一种优选实施例,所述机器箱体1上安装有控制机构5和稳定机构12,所述控制机构5用于对采样架6的位置和角度进行控制,所述稳定机构12用于控制机器箱体1在采样时的稳定。
35.如图1和3所示,作为本发明的一种优选实施例,所述控制机构5包括第一控制模块51、第二控制模块52和第三控制模块53,所述第一控制模块51包括第一齿轮511和第一调节件512,所述第一齿轮511活动安装在安装架4上,且所述第一齿轮511与驱动元件3的输出端相连,所述第一调节件512与第一齿轮511固定连接。
36.如图1和3所示,作为本发明的一种优选实施例,所述第二控制模块52包括第二齿轮521、第一传动单元522和第二调节件523,所述第二齿轮521活动安装在安装架4上,且所述第二齿轮521与驱动元件3的输出端相连,所述第一传动单元522活动安装在第一调节件512上,且所述第二齿轮521与第一传动单元522啮合传动,所述第二调节件523固定安装在第一传动单元522的一端。
37.如图1和3所示,作为本发明的一种优选实施例,所述第三控制模块53包括第三齿轮531和第二传动单元532,所述第三齿轮531活动安装在安装架4上,且所述第三齿轮531与驱动元件3的输出端相连,所述第二传动单元532分别活动安装在第一调节件512和第二调节件523上,所述第二传动单元532与第三齿轮531啮合传动,且所述第二传动单元532的一
端与采样架6固定连接。
38.在本实施例中,驱动元件3驱动第一齿轮511在安装架4上进行转动的同时,第一齿轮511带动第一调节件512进行转动;驱动元件3驱动第二齿轮521在安装架4上进行转动,第二齿轮521带动第一传动单元522在第一调节件512上进行转动的同时,第一传动单元522带动第二调节件523进行转动;驱动元件3驱动第三齿轮531在安装架4上进行转动的同时,第三齿轮531通过带动第二传动单元532在第一调节件512和第二调节件523上进行转动的方式实现了对采样架6的采样位置和角度进行控制。
39.在一个优选的实施例中,所述驱动元件3优先采用的是一种输出端带有转动齿轮的驱动电机;所述第一调节件512和第二调节件523优先采用的是一种满足条件的转杆结构;所述第一传动单元522优先采用的是一种由两个齿轮啮合组成的传动组;所述第二传动单元532优先采用的是一种由四个齿轮一一啮合连接组成的传动组。
40.如图1所示,作为本发明的一种优选实施例,所述行走机构2包括移动模块21、平衡支撑22和固定件23,所述平衡支撑22通过固定件23活动安装在机器箱体1的两侧壁上,所述移动模块21活动安装在平衡支撑22上,且所述移动模块21与驱动元件3的输出端相连接。
41.在本实施例中,驱动元件3驱动移动模块21进行移动,平衡支撑22可以保证移动模块21在移动过程中机器箱体1的平衡。
42.在一个优选的实施例中,所述固定件23优先采用的是一种销轴,所述移动模块21优先采用的是一种带动齿轮和转轴的移动轮组,所述齿轮与驱动元件3上的齿轮啮合连接。
43.如图2和4所示,作为本发明的一种优选实施例,所述缓震机构11包括连接套111、连接件112和弹性件113,所述连接套111固定在采样管92上,所述连接件112的两端分别与连接套111和支架93活动连接,所述弹性件113套装在连接件112上。
44.在本实施例中,所述缓震机构11可以吸收采样管92在采样过程中产生的震动,所述连接件112优先采用的是一种杆状结构;所述弹性件113优先采用的是一种弹簧,也可采用满足弹性条件的弹性片。
45.如图5所示,作为本发明的一种优选实施例,所述稳定机构12包括支臂121、第三动力元件122和支腿123,所述支臂121固定在机器箱体1的侧壁上,所述第三动力元件122安装在支臂121上,且所述第三动力元件122的输出端贯穿支臂121并且与支腿123相连接。
46.在本实施例中,当机器人经行走机构2移动到指定位置后,第三动力元件122驱动支腿123在支臂121上进行移动,使得支腿123与采样地面进行接触,将机器箱体1进行抬升,保证机器人采样过程中的稳定性。
47.在一个优选的实施例中,所述第三动力元件122优先采用的是一种液压式伸缩缸和伸缩杆,也可采用满足条件的气动式伸缩缸和伸缩杆。
48.本发明的工作原理是:当机器人经行走机构2移动到指定位置后,第三动力元件122驱动支腿123在支臂121上进行移动,使得支腿123与采样地面进行接触,将机器箱体1进行抬升;驱动元件3驱动第一齿轮511在安装架4上进行转动的同时,第一齿轮511带动第一调节件512进行转动;驱动元件3驱动第二齿轮521在安装架4上进行转动,第二齿轮521带动第一传动单元522在第一调节件512上进行转动的同时,第一传动单元522带动第二调节件523进行转动;驱动元件3驱动第三齿轮531在安装架4上进行转动的同时,第三齿轮531通过
带动第二传动单元532在第一调节件512和第二调节件523上进行转动的方式实现了对采样架6的采样位置和角度进行控制;第一动力元件81驱动连接架82在采样架6内进行上下移动,连接架82带动支架93在采样架6上进行上下移动,第二动力元件91通过驱动采样管92在支架93上进行转动的方式实现了采样模块9对土壤进行采样;采样模块9带动第一转动件1021进行转动,第一转动件1021带动第二转动件1022和第三转动件1023进行转动,第三转动件1023带动第四转动件1024在取样盒103上转动并且配合第二转动件1022带动取样盒103在采样架6内移动的方式,实现了取样盒6的及时取样;升降模块8驱动采样模块9进行升降,当采样模块9进行下降采样的同时,采样模块9带动取样模块10向左进行移动,方便采样模块9对土壤进行采样;当采样模块9采样完毕向上提升时,采样模块9带动取样模块10向右进行移动,使得取样模块10及时对采样模块9内的土壤进行收集;上述就是该农田土壤采样机器人的工作原理。
49.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1