一种滑靴视觉检测机的制作方法
1.本发明涉及机械零部件的检测设备,尤其涉及检测滑靴的设备,具体是一种滑靴视觉检测机。
背景技术:
2.滑靴是柱塞泵等机械设备中常见的一种零部件,例如,应用于轴向柱塞泵的具有球窝的滑靴,由滑靴-斜盘组成的滑靴摩擦副是轴向柱塞泵的三大摩擦副之一。滑靴的运动速度高且频繁受到周期性的压力冲击、接触比压大,因此,滑靴极易产生磨损,影响设备使用寿命。滑靴的耐磨性能,不仅受滑靴材质的影响,还与滑靴的结构精度密切相关。
3.滑靴通常具有球窝,具有球窝的滑靴(以下简称滑靴),其结构大体如图27所示,需要检测的项目除高度、外径、法兰外径、外观以外,还要检测零件外形的圆柱度、底面的平面度、球窝的表面轮廓及形位精度、球窝中心小孔的形位精度。由于检测项目众多,需要采取多个工步,目前,虽然其中一部分检测项目已经实现了自动化,但对于生产厂家来说,滑靴检测仍然极为繁琐,严重影响生产效率。
技术实现要素:
4.针对背景技术中存在的问题,本发明目的是提供一种滑靴视觉检测机,本发明提出的检测机,根据滑靴的结构特征,在一个工作台上设置了多个检测工位以及与检测工位相对应的视觉检测机构,工件检测过程采用回转式的循环模式,缩短了上料与出料之间的距离,驱动结构紧凑合理,实现了设备的小型化,并有助于实现设备的全自动数字化控制,从而一次性完成滑靴的全部检测项目,极大的提高滑靴检测的效率。
5.为实现上述目的,本发明采用以下技术方案:一种滑靴视觉检测机,包括机架、工作台、旋转台、定位装置、旋转升降装置、上料传送装置、上料机械手、二轴位移机构、下料传送装置、下料机械手、底面视觉检测机构、侧面视觉检测机构、侧倾式俯视视觉检测机构、俯视视觉检测机构和外形视觉检测机构;所述的工作台设在机架上部,旋转台设置在工作台中部上方,在旋转台上方的同一水平面上设有四个工位点,以旋转台的轴心为原点,第一工位点位于y轴的正向,第二工位点位于x轴的正向,第三工位点位于y轴的负向,第四工位点位于x轴的负向,且这四个工位点以旋转台的轴心为中心呈中心对称;所述旋转台上对应这四个工位点设有四个通孔e,在每个通孔e中均设有一个定位装置,所述定位装置用于定位放置工件;所述的旋转升降装置其数量为三个,三个旋转升降装置均设置在旋转台下方并与定位装置可分离的连接,三个旋转升降装置的旋转轴均竖向设置,且三个旋转升降装置分别位于第一工位点、第二工位点、第三工位点的下方;所述旋转升降装置均具有插接件,并通过插接件与定位装置可分离的连接;所述的侧面视觉检测机构设置在第一工位点的侧部,其包括:镜头水平设置的第一线阵相机、水平发射光线的第一光源;所述第一线阵相机的镜头朝向第一工位点,且其镜
头中心高度高于旋转台的上表面;所述的侧倾式俯视视觉检测机构设置在第二工位点的上方,其包括:镜头向下倾斜设置的第二线阵相机、倾斜向下发射光线的第二光源,所述第二线阵相机的镜头朝向第二工位点;所述的俯视视觉检测机构设置在第三工位点的上方,其包括:镜头竖直向下设置的第二面阵相机、竖直向下发射光线的第三光源;所述第二面阵相机的镜头朝向第三工位点;所述的外形视觉检测机构设置在第三工位点的的一侧,其包括镜头水平设置的第三面阵相机和第四光源,所述第三面阵相机的镜头中心高度高于旋转台的上表面,且朝向第三工位点;所述第四光源为背光光源,其通过安装板b设置在旋转台的中部上方,所述安装板b垂直于第三面阵相机的镜头轴线。
6.所述的旋转升降装置包括:固连在工作台底面的安装板a、竖向设置在安装板a上的气缸、竖向设置在气缸一侧的滑轨、设置在滑轨上的电机;所述的气缸的输出端竖直向下,气缸的输出端连接有横向连杆,所述的滑轨上设有滑块,滑块与横向连杆连接,所述电机安装于滑块上;所述的电机为伺服电机,其输出轴连接插接件,所述插接件为拨杆,所述拨杆整体为横杆和竖杆构成的t型结构,其竖杆下端与电机输出端连接,横杆上端穿过工作台上表面与定位装置可分离的连接。
7.所述的定位装置包括上支座、下支座、定位台、定位环、中心轴、磁性载物台、十字旋转轴、平面推力轴承和压簧,所述的下支座固定设置在通孔e内部下方,下支座内部设有竖向的通孔a;所述上支座固连在下支座上部,且上支座底部设有下部开口的内孔,所述内孔与通孔a同轴,在内孔的顶壁同轴设有与内孔同轴的通孔b;所述的定位台固定设置在上支座的上部,在定位台的上表面中部设有定位槽,所述定位槽的底壁设有通孔c,所述通孔c与通孔b同轴;所述的定位环可拆卸的设置在定位槽内,定位环用于定位工件;所述的中心轴由圆柱形的轴体和环形凸台构成,环形凸台同轴设置在轴体的中部并安装于通孔a中,轴体上部穿过通孔b及通孔c;所述的磁性载物台固定设置在中心轴顶端,其外径大于通孔b的内径,所述磁性载物台用于放置工件;所述的压簧套设在轴体上并位于环形凸台与内孔的顶壁之间;所述的十字旋转轴固定套设在中心轴的下端,其底面设有十字型插槽,十字旋转轴通过十字型插槽与旋转升降装置的插接件可分离的连接;所述的平面推力轴承套设在轴体上,并位于环形凸台与十字旋转轴之间;所述的平面推力轴承其轴圈与轴体过渡配合,其座圈与通孔a滑动配合,平面推力轴承的上端面与环形凸台的下端面相接触,平面推力轴承的下端面与十字旋转轴之间设有弹簧垫圈,所述弹簧垫圈与平面推力轴承的下端面相接触。
8.所述的上料传送装置设置在工作台上表面后部右侧,二轴位移机构设置在工作台上表面后部,上料机械手可移动的设置在二轴位移机构上;下料机械手设置在工作台左侧、
下料传送带设置在下料装置的左侧;所述的侧面视觉检测机构安装在工作台上,并位于二轴位移机构的左端。
9.所述的上料传送装置为传送带;所述的二轴位移机构包括:x向直线滑台和z向直线滑台,所述x向直线滑台安装在工作台上,z向直线滑台安装在x向直线滑台上,所述上料机械手安装在z向直线滑台上。
10.所述的底面视觉检测机构设置在旋转台与上料传送装置之间,并位于二轴位移机构前方,其包括:镜头竖直向上设置的第一面阵相机、竖直向上发射光线的第五光源,所述第一面阵相机安装在工作台底面,第五光源安装在工作台上部,在工作台上设有通孔f,所述通孔f用于第一面阵相机的镜头光线通过;所述第五光源为环形光源,其轴线与第一面阵相机的镜头同轴,且第五光源位于第一面阵相机上方。
11.所述的工作台其上表面安装有第二支架,所述第二线阵相机、第二光源均安装在第二支架上端,且第二光源位于第二线阵相机的下方。
12.所述的工作台其上表面还安装有第三支架和第四支架,所述第二面阵相机、第三光源均安装在第三支架上端,且第三光源位于第二面阵相机的下方;所述的第四支架具有悬臂,悬臂末端位于旋转台的中部上方,所述第四光源通过安装板b固连在悬臂末端下方。
13.本发明的有益效果:本发明根据滑靴的结构特征,在一个工作台上设置了多个检测工位以及与检测工位相对应的视觉检测机构,工件检测过程采用回转式的循环模式,缩短了上料与出料之间的距离,驱动结构紧凑合理,实现了设备的小型化,若将数控系统与相应的驱动机构及检测机构相匹配,即可实现设备的全自动数字化控制,从而一次性实现滑靴的全部检测项目,极大的提高滑靴检测的效率。
附图说明
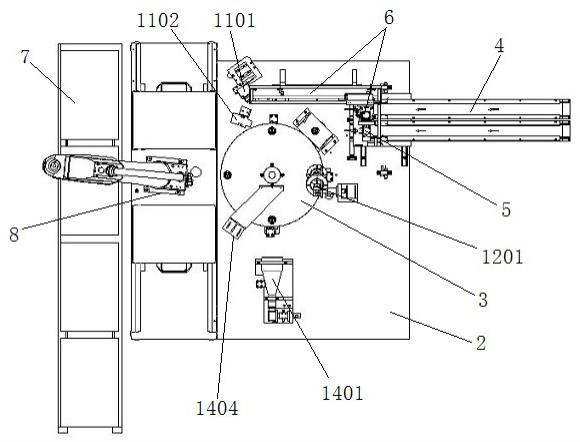
14.图1为本发明的整体结构俯视图。
15.图2为四个工位点的位置示意图。
16.图3为本发明部分结构的立体示意图。
17.图4为工作台与旋转台的立体示意图。
18.图5为工作台底面部分结构的立体示意图。
19.图6为旋转升降装置的立体示意图。
20.图7为旋转升降装置与定位装置的立体示意图。
21.图8为旋转升降装置与定位装置位置关系示意图。
22.图9为旋转台的主视图。
23.图10为旋转台的驱动结构示意图。
24.图11为定位装置的立体结构示意图。
25.图12为定位装置的立体结构剖视图。
26.图13为定位装置的剖视图。
27.图14为下支座的立体示意图。
28.图15为上支座的立体示意图。
29.图16为中心轴的立体示意图。
30.图17为十字旋转轴的立体示意图。
31.图18为磁性载物台的立体示意图。
32.图19为定位台的立体示意图。
33.图20为定位环的立体示意图。
34.图21为上料传送装置的立体示意图。
35.图22为上料机械手与二轴位移机构的立体示意图。
36.图23为侧面视觉检测机构的立体示意图。
37.图24为侧倾式俯视视觉检测机构的立体示意图。
38.图25为俯视视觉检测机构的右侧视图。
39.图26为底面视觉检测机构的立体示意图。
40.图27为滑靴的立体结构示意图。
41.图中:1、机架,2、工作台,3、旋转台,4、上料传送装置,5、上料机械手,6、二轴位移机构,7、下料传送装置,8、下料机械手,9、插接件,10、工件;201、第一工位点,202、第二工位点,203、第三工位点,204、第四工位点,298、通孔f;301、上支座,302、下支座,303、定位台,304、定位环,305、中心轴,306、磁性载物台,307、十字旋转轴,308、平面推力轴承,309、压簧,310、弹簧垫圈,311、内孔,312、通孔b,321、通孔a,331、定位槽,332、通孔c,351、轴体,352、环形凸台,371、十字型插槽,398、驱动电机,397、同步带,399、通孔e;601、x向直线滑台,602、z向直线滑台;902、气缸,903、滑轨,904、电机,905、横向连杆,906、滑块,907、安装板a;1101、第一线阵相机,1102、第一光源;1201、第二线阵相机,1202、第二光源,1203、第二支架;1301、第二面阵相机,1302、第三光源,1303、第三支架;1401、第三面阵相机,1402、第四光源,1403、安装板b,1404、第四支架,1405、悬臂;1501、第一面阵相机,1502、第五光源。
具体实施方式
42.下面将结合说明书附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
43.如图1~图26所示,一种滑靴视觉检测机,包括机架1、工作台2、旋转台3、定位装置、旋转升降装置、上料传送装置4、上料机械手5、二轴位移机构6、下料传送装置7、下料机械手8、底面视觉检测机构、侧面视觉检测机构、侧倾式俯视视觉检测机构、俯视视觉检测机构和外形视觉检测机构;所述的工作台2设在机架1上部,旋转台3设置在工作台2中部上方,旋转台的驱动机构包括驱动电机398和同步带397,驱动电机398设置在平台2底部;所述旋转台3的旋转轴其下端也位于平台2底部,所述驱动电机398通过同步带397与旋转轴下端连接;所述驱动电
机398为伺服电机;在旋转台3上方的同一水平面上设有四个工位点,以旋转台的轴心为原点,第一工位点201位于y轴的正向,第二工位点202位于x轴的正向,第三工位点203位于y轴的负向,第四工位点204位于x轴的负向,且这四个工位点以旋转台3的轴心为中心呈中心对称;所述旋转台3上对应这四个工位点设有四个通孔e399,在每个通孔e399中均设有一个定位装置,所述定位装置用于定位放置工件10;所述的旋转升降装置其数量为三个,三个旋转升降装置均设置在旋转台3下方并与定位装置可分离的连接,三个旋转升降装置的旋转轴均竖向设置,且三个旋转升降装置分别位于第一工位点201、第二工位点202、第三工位点203的下方;所述旋转升降装置均具有插接件9,并通过插接件9与定位装置可分离的连接;所述的侧面视觉检测机构设置在第一工位点201的侧部,其包括:镜头水平设置的第一线阵相机1101、水平发射光线的第一光源1102;所述第一线阵相机1101的镜头朝向第一工位点201,且其镜头中心高度高于旋转台3的上表面;所述的侧倾式俯视视觉检测机构设置在第二工位点202的上方,其包括:镜头向下倾斜设置的第二线阵相机1201、倾斜向下发射光线的第二光源1202,所述第二线阵相机1201的镜头朝向第二工位点202;所述的俯视视觉检测机构设置在第三工位点203的上方,其包括:镜头竖直向下设置的第二面阵相机1301、竖直向下发射光线的第三光源1302;所述第二面阵相机1301的镜头朝向第三工位点203;所述的外形视觉检测机构设置在第三工位点203的的一侧,其包括镜头水平设置的第三面阵相机1401和第四光源1402,所述第三面阵相机1401的镜头中心高度高于旋转台3的上表面,且朝向第三工位点203;所述第四光源1402为背光光源,其通过安装板b1403设置在旋转台3的中部上方,所述安装板b1403垂直于第三面阵相机1401的镜头轴线。
44.所述的旋转升降装置包括:固连在工作台2底面的安装板a907、竖向设置在安装板a907上的气缸902、竖向设置在气缸902一侧的滑轨903、设置在滑轨903上的电机904;所述的气缸902其输出端竖直向下,气缸902的输出端连接有横向连杆905,所述的滑轨903上设有滑块906,滑块906与横向连杆605连接,所述电机904安装于滑块906上;所述的电机904为伺服电机,其输出轴连接插接件9,所述插接件9为拨杆,所述拨杆整体为横杆和竖杆构成的t型结构,其竖杆下端与电机904输出端连接,横杆上端穿过工作台2上表面与定位装置可分离的连接。
45.所述的定位装置包括上支座301、下支座302、定位台303、定位环304、中心轴305、磁性载物台306、十字旋转轴307、平面推力轴承308和压簧309,所述的下支座302固定设置在通孔e399内部下方,下支座302内部设有竖向的通孔a321;所述上支座301设置在通孔e399内部上方并固连在下支座302上部,且上支座301底部设有下部开口的内孔311,所述内孔311与通孔a321同轴,在内孔311的顶壁同轴设有与内孔311同轴的通孔b312;所述的定位台303固定设置在上支座301的上部,在定位台303的上表面中部设有定位槽331,所述定位槽331的底壁设有通孔c332,所述通孔c332与通孔b312同轴;所述的定位环304可拆卸的设置在定位槽331内,定位环304用于定位工件10;
所述的中心轴305由圆柱形的轴体351和环形凸台352构成,环形凸台352同轴设置在轴体351的中部并安装于通孔a321中,轴体351上部穿过通孔b312及通孔c332;所述的磁性载物台306固定设置在中心轴305顶端,其外径大于通孔b312的内径,所述磁性载物台306用于放置工件10;所述的压簧309套设在轴体351上并位于环形凸台352与内孔311的顶壁之间;所述的十字旋转轴307固定套设在中心轴305的下端,其底面设有十字型插槽371,十字旋转轴307通过十字型插槽371与旋转升降装置的插接件9可分离的连接;所述的平面推力轴承308套设在轴体351上,并位于环形凸台352与十字旋转轴307之间;所述的平面推力轴承308其轴圈与轴体351过渡配合,其座圈与通孔a321滑动配合,平面推力轴承308的上端面与环形凸台352的下端面相接触,平面推力轴承308的下端面与十字旋转轴307之间设有弹簧垫圈310,所述弹簧垫圈310与平面推力轴承308的下端面相接触。
46.所述的上料传送装置4设置在工作台2上表面后部右侧,二轴位移机构6设置在工作台2上表面后部,上料机械手5可移动的设置在二轴位移机构6上;下料机械手8设置在工作台左侧、下料传送装置7设置在下料机械手8的左侧;所述的侧面视觉检测机构安装在工作台2上,并位于二轴位移机构6的左端。
47.所述的上料传送装置4为传送带;所述的二轴位移机构6包括:x向直线滑台601和z向直线滑台602,所述x向直线滑台601安装在工作台2上,z向直线滑台602安装在x向直线滑台601上,所述上料机械手5安装在z向直线滑台602上。
48.所述的底面视觉检测机构设置在旋转台3与上料传送装置4之间,并位于二轴位移机构6前方,其包括:镜头竖直向上设置的第一面阵相机1501、竖直向上发射光线的第五光源1502,所述第一面阵相机1501安装在工作台2底面,第五光源1502安装在工作台2上部,在工作台2上设有通孔f298,所述通孔f298用于第一面阵相机1501的镜头光线通过;所述第五光源1502为环形光源,其轴线与第一面阵相机1501的镜头同轴,且第五光源1502位于第一面阵相机1501上方。
49.所述的工作台2其上表面安装有第二支架1203,所述第二线阵相机1201、第二光源1202均安装在第二支架上端,且第二光源1202位于第二线阵相机1201的下方。
50.所述的工作台其上表面还安装有第三支架1303和第四支架1404,所述第二面阵相机1301、第三光源1302均安装在第三支架1303上端,且第三光源1302位于第二面阵相机1301的下方;所述的第四支架1404具有悬臂1405,悬臂1405末端位于旋转台3的中部上方,所述第四光源1402通过安装板b1403固连在悬臂1405末端下方。
51.本发明的运行过程如下:工件10从上料传送装置4进入,上料机械手5抓取工件10后,由二轴位移机构6带动上料机械手5移动至底面视觉检测机构上方,停留一定时间,对工件10的底面进行检测;而后上料机械手5移动至第一工位点201上方,将工件10放入定位装置的定位环304中,磁性载物台306与工件10位置确定后,上料机械手5松开并回复至起始位置继续抓取第二个工件10;此时,位于第一工位点201下方的定位装置与旋转升降装置结合,旋转升降装置驱动定位装置上升,令工件10从定位环304中升起至第一工位点201,然后磁性载物台306旋转一周以上,由侧面视觉检测机构对工件10的侧面结构进行检测;
侧面结构检测完毕,旋转升降装置旋转并回落,直至与定位装置分离,在压簧309的作用下,工件10随磁性载物台306再次进入定位环304;而后旋转台3旋转,工件10移动至第二工位点202下方,再次上升并旋转,由侧倾式俯视视觉检测机构进行球窝内表面结构的检测;在工件10侧面检测过程中,上料机械手5抓取第二个工件10,完成工件底面检测,当第一个工件10从第一工位点201移动至第二工位点202时,第二个工件10进入第一个工位点201;第一个工件10的球窝内表面结构检测完毕,第二个工件10的侧面结构检测也同时完毕;接下来,随着旋转台3的转动,第一个工件10进入第三工位点203,而第二个工件10进入第二工位点202,同步进行检测;此时第三个工件进入第一工位点201;当第一个工件10在第三工位点203的检测完毕,进入第四工位点,由下料机械手将其取出,根据检测结果,分类放置在下料传送装置上,完成第一个工件10的检测;其后续的工件10按照上述节奏,利用旋转台3的回转循环,持续进行运转。
52.具体的,本发明的技术方案重点在于设备结构,上述结构与数控系统及视觉检测软件相结合,即可实现滑靴的全自动一次性检测,检测效率将大大提高,可以做到一件一检,全面提高产品质量。
53.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
54.本发明未详述部分均为现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1