一种旋转机械轴振测量端面平整度在线测试装置和方法与流程
1.本发明涉及旋转机械轴振测量端面平整度测试技术领域,具体涉及一种旋转机械轴振测量端面平整度在线测试装置和方法。
背景技术:
2.轴振旋转机械的重要监视参数,是判断旋转机械是否能正常安全运行的重要依据,几乎所有的大型旋转机械都将振动加入机械保护的内容,当轴振达到设计值时发出跳闸停机指令。
3.但由于加工、检修、运行等原因,如轴振测量端面受损或附着其它异物,将导致轴振测量不准,振动增大,甚至达到振动保护动作,旋转机械停止工作,带来巨大的经济损失和安全隐患。
4.由于没有测试设备及检测方法,很多大型旋转机械维护技术人员不能发现上述问题,甚至在由于上述原因振动超标时也不能准确查找到原因,带来巨大经济损失。
技术实现要素:
5.本发明要解决的技术问题是:提供一种旋转机械轴振测量端面平整度在线测试装置和方法,以解决当前不能判断轴振测量端面平整度及其引起的轴振测量不准、旋转机械保护误动的问题。
6.本发明采取的技术方案为:一种旋转机械轴振测量端面平整度在线测试装置,包括转轴、键相测量盘、键相探头、x向轴振测量探头、轴承座、轴振测量端面、y向轴振测量探头、高中压转子、低压转子一、发电机转子,高中压转子、低压转子一固定连接在转轴上,转轴连接到发电机转子,转轴旋转连接到轴承座上且每个转子两侧安装一对轴承座,键相测量盘与转轴相连,轴振测量端面设置在转轴的每个轴承处上,x向轴振测量探头和y向轴振测量探头按设定夹角正对轴振测量端面且安装在轴承座上。
7.优选的,上述每个轴承座处均设置轴振测量端面和一对x向轴振测量探头和y向轴振测量探头。
8.优选的,上述键相探头、x向轴振测量探头和y向轴振测量探头均通过信号电缆连接到轴振及键相信号预处理装置,轴振及键相信号预处理装置均通过采集卡连接线连接到采集卡,采集卡通过数据传输线连接到上位机。
9.一种旋转机械轴振测量端面平整度在线测试装置的测试方法包括以下步骤:
10.步骤1、确认转轴在匀速旋转状态方法如下:
11.a1、以键相传感器获得的第一个脉冲信号时刻为t1,第二个脉冲信号时刻为t2,直至tn,其中n为第n个脉冲,n>5;
12.b1、计算脉冲时间间隔序列(δt1,δt2,δt3,
…
,δt
n-1
),其中:
13.δt1=t
2-t114.δt
n-1
=t
n-t
n-1
15.c1、当(δt
max-δt
min
)/δt
equ
<ε满足时,则转轴为匀速旋转状态;其中δt
max
为时间间隔序列(δt1,δt2,δt3,
…
,δt
n-1
)中的最大值,δt
min
为时间间隔序列(δt1,δt2,δt3,
…
,δt
n-1
)中的最小值,δt
equ
为时间间隔序列(δt1,δt2,δt3,
…
,δt
n-1
)的平均值,计算如下:
16.δt
max
=max(δt1,δt2,δt3,
…
,δt
n-1
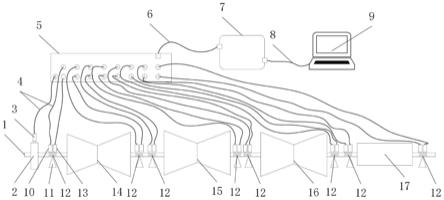
)
17.δt
min
=min(δt1,δt2,δt3,
…
,δt
n-1
)
18.δt
equ
=equ(δt1,δt2,δt3,
…
,δt
n-1
)
19.其中,ε为运行误差精度,ε《0.01;
20.步骤2、计算转子旋转δ角度需要的时间δtc,其中δ为x向轴振测量探头与y向轴振测量探头之间的夹角;
21.δtc=(δ/2π)δt
equ
;
22.步骤3、计算一周期内x向轴振测量探头采集信号突变次数及其对应的时刻、变化幅值;判断x向轴振测量探头所测信号是否发生突变方法如下:
23.a3、信号突变判断;
24.当δa
x
》ae时,则判断信号发生突变,其中:
25.δa
x
=(a
xmax-a
xmin
)
26.式中,δa
x
为计算时间段δte内x向轴振测量探头所测得的最大值与最小值之间的差值,a
xmax
为计算时间段δte内x向轴振测量探头所测信号的最大值,a
xmin
为计算时间段δte内x向轴振测量探头所测信号的最小值,ae为信号突变门槛值,其中:
27.δte=δt
equ
×
le/l
28.式中,le为测量端面上判断信号突变的周向长度,l为测量端面周长,le/l小于0.02;
29.b3、以键相传感器脉冲信号为零点t
0x
,第一次信号突变的时间点为s
x1
,第一个突变时间点对应的突变幅值为δa
x1
,以此类推,当键相传感器下一个脉冲信号发出时为止,记为时间终点t
1x
,该时间段(相当于转子旋转了一圈)内,得到时间序列s
x
和幅值序列δa
x
:
30.s
x
=(s
x1
,s
x2
,s
x3
,
…
,s
xi
)
31.δa
x
=(δa
x1
,δa
x2
,δa
x3
,
…
,δa
xi
)
32.其中i为该时间段内的突变次数;
33.步骤4、计算一周期内y向轴振测量探头采集信号突变次数及其对应的时刻、变化幅值,信号突变次数判断方法如下:
34.a4、信号突变判断:
35.当δay》ae时,则判断信号发生突变,其中:
36.δay=(a
ymax-a
ymin
)
37.式中,δay为计算时间段δte内y向轴振测量探头所测得的最大值与最小值之间的差值,a
ymax
为计算时间段δte内y向轴振测量探头所测信号的最大值,a
ymin
为计算时间段δte内y向轴振测量探头所测信号的最小值;
38.b4、以t
0y
为起点,第一次信号突变的时间点为s
y1
,第一个突变时间点对应的突变幅值为δa
y1
,以此类推,以t
1y
为终点,以此类推,该时间段内,得到时间序列sy、幅值序列δay;
39.t
0y
=t
0x
+δtc40.t
1y
=t
1x
+δtc41.sy=(s
y1
,s
y2
,s
y3
,
…
,s
yi
)
42.δay=(δa
y1
,δa
y2
,δa
y3
,
…
,δa
yi
)
43.其中i为该时间段内的突变次数;
44.步骤5、根据步骤1-4的结果对测量端面平整度判断,方法如下:
45.a5、如信号序列s
x
、sy中任意一个序列中元素个数为零,则该测量端面平整度良好;
46.b5、如满足以下四式,则可判断s
x1
时刻对应的测量端面平整度较差;
47.s
ym
》s
x1
+δt
c-ω
48.s
ym
《s
x1
+δtc+ω
49.s
ym
∈(s
y1
±
ω,s
y2
±
ω,s
y3
±
ω,
…
,s
yi
±
ω)
50.δa
xm-δa
ym
《0.1
×ae
51.式中,ω为时间误差,ω=0.005
×
δt
equ
;
52.c5、同理,判断时间序列s
x
中对应的测量端面平整度;
53.步骤6、重复步骤1-5对剩余测量端面进行判断。
54.本发明的有益效果:与现有技术相比,本发明通过引入键相探头、x向轴振测量探头、y向轴振测量探头测量信号,对测量信号进行处理,结合转轴旋转一周内x向轴振测量探头、y向轴振测量探头测量信号,通过对其进行相关性分析,能有效判断并掌握轴振测量端面的平整性,避免轴振信号因测量端面问题导致的轴振测量偏大及停机故障。同时,该方法及装置的实施,对旋转机械事故分析、提高旋转机械运行的安全性和经济性有重要意义。
附图说明
55.图1为图1装置系统图;
56.图2为x向轴振测量探头和y向轴振测量探头之间夹角示意图;
57.图3为计算流程图。
具体实施方式
58.下面结合附图及具体的实施例对本发明进行进一步介绍。
59.实施例1:如图1-2所示,一种旋转机械轴振测量端面平整度在线测试装置,包括转轴1、键相测量盘2、键相探头3、x向轴振测量探头10、轴承座11、轴振测量端面12、y向轴振测量探头13、高中压转子14、低压转子一15、低压转子二16、发电机转子17,高中压转子14、低压转子一15和低压转子二16固定连接在转轴1上,转轴1连接到发电机转子17,转轴1旋转连接到轴承座11上且每个转子两侧安装一对轴承座11,键相测量盘2与转轴1相连,轴振测量端面12设置在转轴1的每个轴承处上,x向轴振测量探头10和y向轴振测量探头13按设定夹角δ正对轴振测量端面12且安装在轴承座11上,所有轴承座均安装在测试平台上。
60.优选的,上述每个轴承座11处均设置轴振测量端面12和一对x向轴振测量探头10和y向轴振测量探头13。
61.优选的,上述键相探头3、x向轴振测量探头10和y向轴振测量探头13均通过信号电缆4连接到轴振及键相信号预处理装置5,轴振及键相信号预处理装置5均通过采集卡连接
线6连接到采集卡7,采集卡7通过数据传输线8连接到上位机9,x向轴振测量探头10、y向轴振测量探头13正对轴振测量端面12并将测得电信号通过电缆4接入轴振及键相信号预处理装置5,轴振及键相信号预处理装置5将信号进行调理后通过采集卡连接线6将模拟信号接入采集卡7,采集卡7将模拟量信号转化为数字信号,并通过数据传输线8将数字信号送入电脑9进行处理,键相探头3、x向轴振测量探头10、y向轴振测量探头13为接触式或非接触式,x向轴振测量探头10、y向轴振测量探头13能将轴振测量端面12平整度转化为电信号;轴振及键相信号预处理装置5包括键相探头3、x向轴振测量探头10、y向轴振测量探头13对应的的信号放大器、前置器、信号调理器,能为键相探头3、x向轴振测量探头10、y向轴振测量探头13提供电源并传输模拟量信号;采集卡的采样率大于50k,采样率ad转化精度大于16bit。
62.实施例2:如图3所示,一种旋转机械轴振测量端面平整度在线测试装置的测试方法包括以下步骤:
63.步骤1、确认转轴1在匀速旋转状态方法如下:
64.a1、以键相传感器3获得的第一个脉冲信号时刻为t1,第二个脉冲信号时刻为t2,直至tn,其中n为第n个脉冲,n>5;
65.b1、计算脉冲时间间隔序列(δt1,δt2,δt3,
…
,δt
n-1
),其中:
66.δt1=t
2-t167.δt
n-1
=t
n-t
n-1
68.c1、当(δt
max-δt
min
)/δt
equ
<ε满足时,则转轴1为匀速旋转状态;其中δt
max
为时间间隔序列(δt1,δt2,δt3,
…
,δt
n-1
)中的最大值,δt
min
为时间间隔序列(δt1,δt2,δt3,
…
,δt
n-1
)中的最小值,δt
equ
为时间间隔序列(δt1,δt2,δt3,
…
,δt
n-1
)的平均值,计算如下:
69.δt
max
=max(δt1,δt2,δt3,
…
,δt
n-1
)
70.δt
min
=min(δt1,δt2,δt3,
…
,δt
n-1
)
71.δt
equ
=equ(δt1,δt2,δt3,
…
,δt
n-1
)
72.其中,ε为运行误差精度,ε《0.01;
73.步骤2、计算转子旋转δ角度需要的时间δtc,其中δ为x向轴振测量探头10与y向轴振测量探头13之间的夹角;
74.δtc=(δ/2π)δt
equ
;
75.步骤3、计算一周期内x向轴振测量探头10采集信号突变次数及其对应的时刻、变化幅值;判断x向轴振测量探头10所测信号是否发生突变方法如下:
76.a3、信号突变判断;
77.当δa
x
》ae时,则判断信号发生突变,其中:
78.δa
x
=(a
xmax-a
xmin
)
79.式中,δa
x
为计算时间段δte内x向轴振测量探头10所测得的最大值与最小值之间的差值,a
xmax
为计算时间段δte内x向轴振测量探头10所测信号的最大值,a
xmin
为计算时间段δte内x向轴振测量探头10所测信号的最小值,ae为信号突变门槛值,其中:
80.δte=δt
equ
×
le/l
81.式中,le为测量端面上判断信号突变的周向长度,l为测量端面周长,le/l小于0.02;
82.b3、以键相传感器3脉冲信号为零点t
0x
,第一次信号突变的时间点为s
x1
,第一个突变时间点对应的突变幅值为δa
x1
,以此类推,当键相传感器3下一个脉冲信号发出时为止,记为时间终点t
1x
,该时间段内,得到时间序列s
x
和幅值序列δa
x
:
83.s
x
=(s
x1
,s
x2
,s
x3
,
…
,s
xi
)
84.δa
x
=(δa
x1
,δa
x2
,δa
x3
,
…
,δa
xi
)
85.其中i为该时间段内的突变次数;
86.步骤4、计算一周期内y向轴振测量探头13采集信号突变次数及其对应的时刻、变化幅值,信号突变次数判断方法如下:
87.a4、信号突变判断:
88.当δay》ae时,则判断信号发生突变,其中:
89.δay=(a
ymax-a
ymin
)
90.式中,δay为计算时间段δte内y向轴振测量探头13所测得的最大值与最小值之间的差值,a
ymax
为计算时间段δte内y向轴振测量探头13所测信号的最大值,a
ymin
为计算时间段δte内y向轴振测量探头13所测信号的最小值;
91.b4、以t
0y
为起点,第一次信号突变的时间点为s
y1
,第一个突变时间点对应的突变幅值为δa
y1
,以此类推,以t
1y
为终点,以此类推,该时间段内,得到时间序列sy、幅值序列δay;
92.t
0y
=t
0x
+δtc93.t
1y
=t
1x
+δtc94.sy=(s
y1
,s
y2
,s
y3
,
…
,s
yi
)
95.δay=(δa
y1
,δa
y2
,δa
y3
,
…
,δa
yi
)
96.其中i为该时间段内的突变次数;
97.步骤5、根据步骤1-4的结果对测量端面平整度判断,方法如下:
98.a5、如信号序列s
x
、sy中任意一个序列中元素个数为零,则该测量端面平整度良好;
99.b5、如满足以下四式,则可判断s
x1
时刻对应的测量端面平整度较差;
100.s
ym
》s
x1
+δt
c-ω
101.s
ym
《s
x1
+δtc+ω
102.s
ym
∈(s
y1
±
ω,s
y2
±
ω,s
y3
±
ω,
…
,s
yi
±
ω)
103.δa
xm-δa
ym
《0.1
×ae
104.式中,ω为时间误差,ω=0.005
×
δt
equ
;
105.c5、同理,判断时间序列s
x
中对应的测量端面平整度;
106.步骤6、重复步骤1-5对剩余测量端面进行判断。
107.本发明通过引入键相探头、x向轴振测量探头、y向轴振测量探头测量信号,对测量信号进行处理,结合转轴旋转一周内x向轴振测量探头、y向轴振测量探头测量信号,通过对其进行相关性分析,能有效判断并掌握轴振测量端面的平整性,避免轴振信号因测量端面问题导致的轴振测量偏大及停机故障。
108.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内,因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1