适用于低轨导航增强的环境自适应导航装置及方法与流程
1.本发明涉及卫星通信与导航技术领域,尤其涉及一种适用于低轨导航增强的环境自适应导航装置及方法。
背景技术:
2.近年来,随着各行业对卫星导航的全面应用,对gnss卫星导航系统提出了更高的要求,例如系统完好性、抗干扰性、高精度导航等更高的性能。因此衍生出各种用于提升卫星导航性能的卫星系统,如增强系统、低轨卫星系统等。
3.低轨通信卫星发展迅速。由于低轨卫星轨道运行高度低,落地功率高,加上低轨微小卫星运行成本低,因此对低轨卫星系统的研究也逐步增加。低轨卫星通信系统可广泛应用于移动通信、互联网、导航增强、目标监测等各个领域。其中,低轨卫星在卫星导航抗干扰方向的研究也越来越深入。无论是军事领域还是民用领域,如何在各种复杂环境下快速捕获导航星信号一直是一个难点。很多传统的捕获算法,或是算法复杂占用资源大,或是实际应用难度大,总之效果不理想。
4.已有的低轨卫星系统尝试通过低轨卫星系统转发gnss导航星电文信息同步下发,从而达到辅助各类导航装置获取gnss导航星信号的目的。但是,导航装置如何实现低轨卫星信号的接收与处理,如何正确应用低轨导航增强辅助的导航星信息,尚无此类导航装置能够有效解决。
技术实现要素:
5.为克服上述现有技术中的缺陷,本发明的目的在于提供一种适用于低轨导航增强的环境自适应导航装置及方法,可接收处理低轨卫星信号,并在gnss信号弱或存在干扰的情况下,对弱gnss信号进行快速捕获和稳定跟踪。同时,还可捕获正常的gnss卫星信号,从而实现gnss精确导航定位。
6.为实现上述发明目的,本发明的技术方案是:
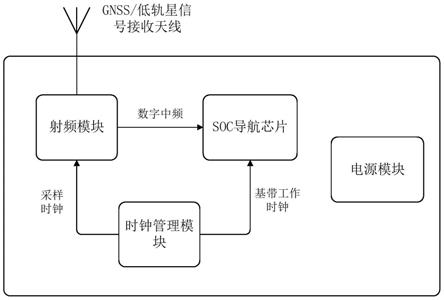
7.本发明提供一种适用于低轨导航增强的环境自适应导航装置,包括:gnss/低轨卫星信号接收天线、射频模块、系统级导航芯片、时钟管理模块和电源模块,
8.所述gnss/低轨卫星信号接收天线用于接收gnss信号和低轨卫星信号;
9.所述射频模块用于对所述gnss信号或所述低轨卫星信号进行低噪声放大和下变频处理,并输出数字中频信号;
10.所述系统级导航芯片用于对所述数字中频信号进行捕获跟踪、同步译码和定位授时;
11.所述时钟管理模块用于为所述射频模块提供采样时钟信号,并为所述系统级导航芯片提供基带工作时钟信号;
12.所述电源模块用于为所述gnss/低轨卫星信号接收天线、所述时钟管理模块、所述射频模块和所述系统级导航芯片提供电源。
13.根据本发明的一个方面,所述时钟管理模块包括:恒温晶振和频率综合器,
14.所述恒温晶振用于为所述频率综合器提供高精度稳定的基准时钟信号;
15.所述频率综合器用于将所述基准时钟信号调整为采样时钟信号,同时输出基带工作时钟信号。
16.根据本发明的一个方面,所述射频模块包括:本振发生模块、混频模块、低通滤波器和ad采样模块,
17.所述本振发生模块用于在所述采样时钟信号的基础上产生本振信号;
18.所述混频模块用于将所述gnss信号、所述低轨卫星信号分别与相应的本振信号进行混频;
19.所述低通滤波器用于将混频后的信号的高频部分滤除,留下低频的模拟中频信号;
20.所述ad采样模块用于在所述采样时钟信号的驱动下对所述模拟中频信号采样生成数字中频信号。
21.根据本发明的一个方面,所述系统级导航芯片包括:基带处理模块与信号处理模块,
22.所述基带处理模块包括捕获模块与跟踪模块,
23.所述捕获模块用于捕获所述gnss信号和所述低轨卫星信号;
24.所述跟踪模块用于完成所述gnss信号和所述低轨卫星信号的环路跟踪处理、同步处理、译码处理,并对所述gnss信号和所述低轨卫星信号的观测量进行解算,输出所述gnss信号和所述低轨卫星信号的观测量信息、时间信息和电文信息;
25.所述信号处理模块包括单星定位模块和gnss导航定位模块,
26.所述单星定位模块用于根据所述低轨卫星信号的观测量信息、时间信息和电文信息输出粗略的位置和速度信息;
27.所述gnss导航定位模块用于根据所述gnss信号的观测量信息、时间信息和电文信息实现gnss导航定位。
28.根据本发明的一个方面,所述gnss信号和所述低轨卫星信号的观测量信息均包括伪距观测量和多普勒观测量。
29.一种利用如前述所示的适用于低轨导航增强的环境自适应导航装置实现的适用于低轨导航增强的环境自适应导航方法,包括:
30.s1.利用gnss/低轨卫星信号接收天线接收gnss信号和低轨卫星信号;
31.s2.当所述gnss信号为强信号时,对所述gnss信号进行捕获跟踪、同步、译码和观测量解算,实现gnss信号的导航定位,当所述gnss信号为弱信号时,执行步骤s3~s4;
32.s3.对所述低轨卫星信号进行处理,实现低轨卫星信号的捕获跟踪、同步、译码、观测量解算和单星定位解算;
33.s4.利用处理后的低轨卫星信号辅助gnss弱信号进行快速捕获和稳定跟踪,实现gnss信号的导航定位。
34.根据本发明的另一个方面,所述步骤s3包括:
35.s31.利用射频模块对所述低轨卫星信号进行低噪声放大和下变频处理,并输出数字中频信号;
36.s32.利用时钟管理模块为所述射频模块提供采样时钟信号,并为系统级导航芯片提供基带工作时钟信号;
37.s33.利用所述系统级导航芯片对所述数字中频信号的同向和正交两路信号进行捕获跟踪、同步、译码,分别得到低轨卫星的导航电文信息和时间信息以及gnss导航星的导航电文信息和时间信息;
38.s34.根据所述低轨卫星的导航电文信息对低轨卫星信号的观测量进行解算;
39.s35.利用所述系统级导航芯片的单星定位模块根据所述观测量获得定位授时结果;
40.s36.根据所述定位授时结果和所述gnss导航星的导航电文信息,计算得到gnss导航星的相位和多普勒信息。
41.根据本发明的另一个方面,所述步骤s36中获得gnss导航星相位的过程包括:
42.s3611.利用gnss导航星的导航电文信息和时间信息,得到gnss导航星的位置和速度;
43.s3612.根据所述gnss导航星的位置和所述导航装置的位置计算得到粗略的伪距ρ1;
44.s3613.考虑电离层、对流层和卫星钟差的影响,对所述伪距ρ1进行修正,得到修正后的伪距ρ2;
45.s3614.根据所述伪距ρ2计算得到粗略的传播时间t1;
46.s3615.重复迭代所述步骤s3611~s3614,获得精确的传播时间t2,结合所述导航装置的接收时间获得发射时间ts,从而获得初始码相位。
47.根据本发明的另一个方面,所述步骤s36中获得gnss导航星多普勒信息的过程包括:
48.s3621.获取gnss导航星准确相位的计算方法中迭代后得到的gnss导航星的位置速度;
49.s3622.根据所述gnss导航星的位置速度和所述导航装置的位置速度信息计算得到粗略的多普勒d1;
50.s3623.考虑所述导航装置的时钟漂移的影响,对粗略的多普勒d1进行修正,得到准确的多普勒d2。
51.有益效果:
52.根据本发明的方案,兼容正常gnss信号处理与低轨星信号处理,gnss信号强时可进行正常gnss导航定位。当gnss信号弱或存在干扰导致无法正常捕获gnss信号时,启用低轨卫星辅助策略,使用低轨卫星信息辅助gnss导航星信号的快速捕获和稳定跟踪,得到观测量后完成gnss导航定位。由此实现在不同信号环境条件下的自适应快速导航定位。
53.本发明实现了低轨卫星信号的接收与处理,同步处理i/q两路电文信息,准确获得低轨卫星电文信息和gnss导航星电文信息,实现导航装置粗略定位授时,并准确计算出gnss导航星初始相位和多普勒信息,实现gnss导航星信号的快速捕获,使用长时间相干积分方法实现弱信号的快速捕获和弱信号的稳定跟踪,最终实现gnss导航定位。
54.本发明为gnss导航星信号弱或存在干扰的应用场景提供了高性能导航装置,可广泛应用于军用、民用等不同应用场景。同时本发明不仅适用于地面导航,更可扩展应用于
海、陆、空等各类导航应用终端,提高复杂环境下的gnss导航定位能力。
55.本发明采用基于soc导航芯片的硬件平台,实现小型化低功耗的同时提高了导航装置的处理速度。
附图说明
56.图1示意性表示本发明的一种实施方式的低轨导航增强的环境自适应导航装置的结构示意图;
57.图2示意性表示本发明的一种实施方式的低轨导航增强的环境自适应导航装置的原理框图;
58.图3示意性表示本发明的一种实施方式的低轨导航增强的环境自适应导航方法的流程图;
59.图4示意性表示本发明的一种实施方式的低轨导航增强的环境自适应导航方法的低轨卫星信号处理流程图;
60.图5示意性表示本发明的一种实施方式的低轨导航增强的环境自适应导航方法的gnss导航星初始相位计算方法流程图;
61.图6示意性表示本发明的一种实施方式的低轨导航增强的环境自适应导航方法的gnss导航星多普勒信息的计算方法流程图。
具体实施方式
62.为了更清楚地说明本发明实施方式或现有技术中的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
63.下面结合附图和具体实施方式对本发明作详细地描述,实施方式不能在此一一赘述,但本发明的实施方式并不因此限定于以下实施方式。
64.根据本发明的构思,一方面,可兼容正常gnss信号与低轨星信号的处理。当gnss信号强时,本发明的低轨导航增强的环境自适应导航装置可直接对正常gnss信号进行导航定位;当gnss信号弱或存在干扰导致无法正常捕获gnss信号时,启用低轨卫星辅助策略,使用低轨卫星信息来辅助gnss导航星信号的快速捕获和稳定跟踪,得到观测量后完成gnss导航定位。从而实现在不同信号环境条件下的自适应快速导航定位。另一方面,还可实现低轨卫星信号的接收与处理。同步处理同向i/正交q两路电文信息,准确获得低轨卫星电文信息和gnss导航星电文信息,实现导航装置的粗略定位授时,并准确计算出gnss导航星的初始相位和多普勒信息,实现gnss导航星信号的快速捕获,使用长时间相干积分方法实现弱gnss信号的快速捕获和弱信号的稳定跟踪,最终实现gnss导航定位。
65.如图1所示,本实施方式的低轨导航增强的环境自适应导航装置,包括:gnss/低轨卫星信号接收天线、射频模块、系统级(soc)导航芯片、时钟管理模块和电源模块。gnss/低轨卫星信号接收天线用于接收gnss信号和低轨卫星信号;射频模块用于对gnss信号或所述低轨卫星信号进行低噪声放大和下变频处理,并输出数字中频信号;系统级导航芯片用于对数字中频信号进行捕获跟踪、同步译码和定位授时;时钟管理模块用于为射频模块提供
采样时钟信号,并为系统级导航芯片提供基带工作时钟信号;电源模块用于为gnss/低轨卫星信号接收天线、时钟管理模块、射频模块和系统级导航芯片提供电源。
66.如图2所示,时钟管理模块包括:恒温晶振和频率综合器。恒温晶振用于为频率综合器提供高精度稳定的基准时钟信号;频率综合器用于将基准时钟信号调整为采样时钟信号,同时输出基带工作时钟信号。时钟管理模块由基准时钟统一产生ad采样时钟信号和soc导航芯片基带工作时钟信号,实现时钟同源。
67.射频模块包括:本振发生模块、混频模块、低通滤波器和ad采样模块。本振发生模块用于在采样时钟信号的基础上产生本振信号;混频模块用于将gnss信号、低轨卫星信号与本振信号进行混频;低通滤波器用于将混频后的信号的高频部分滤除,留下低频的模拟中频信号;ad采样模块用于在采样时钟信号的驱动下对模拟中频信号采样生成数字中频信号。
68.系统级导航芯片(soc导航芯片)包括:基带处理模块与信号处理模块。基带处理模块包括捕获模块与跟踪模块,捕获模块用于捕获gnss信号和低轨卫星信号;跟踪模块用于对gnss信号和低轨卫星信号的伪距观测量和多普勒观测量进行解算,输出gnss信号和低轨卫星信号的时间信息和电文信息,实现gnss信号和低轨卫星信号的跟踪。信号处理模块包括单星定位模块和gnss导航定位模块,单星定位模块用于根据弱gnss信号的低轨卫星信号的伪距观测量和多普勒观测量、时间信息和电文信息输出粗略的位置和速度信息;gnss导航定位模块用于根据gnss信号的伪距观测量和多普勒观测量、时间信息和电文信息实现gnss导航定位。
69.如图3所示,本实施方式利用上述装置还实现了如下的低轨导航增强的环境自适应导航方法,包括:
70.s1.利用gnss/低轨卫星信号接收天线接收gnss信号和低轨卫星信号;
71.s2.当gnss信号为强信号时,对gnss信号进行捕获跟踪、同步、译码和观测量解算,实现gnss信号的导航定位,当gnss信号为弱信号时,执行步骤s3~s4;
72.s3.对低轨卫星信号进行处理,实现低轨卫星信号的捕获跟踪、同步、译码、观测量解算和单星定位解算;
73.s4.利用处理后的低轨卫星信号辅助gnss弱信号进行快速捕获和稳定跟踪,实现gnss信号的导航定位。
74.当gnss信号强时,利用捕获模块首先对gnss信号进行捕获,捕获到gnss信号后转到跟踪模块进行跟踪,跟踪模块输出gnss卫星的伪距、多普勒等观测量和时间信息、电文信息给gnss导航定位模块。通过上述捕获跟踪、同步、译码、定位的正常流程实现gnss信号的精确导航定位。当gnss信号弱时,利用捕获模块、跟踪模块依次对低轨卫星信号进行捕获跟踪、同步、译码,i路输出低轨卫星信号的伪距、多普勒等观测量给单星定位模块,同时q路输出低轨卫星转发的gnss导航电文和时间信息。单星定位模块根据低轨星的伪距、多普勒等观测量实现粗略的定位测速,此时只是先对低轨卫星的位置、速度进行粗略定位。然后,利用捕获模块根据导航装置粗略的位置速度以及低轨卫星转发的gnss导航电文和时间信息辅助捕获gnss信号,跟踪模块通过对gnss信号进行长时间相干积分完成gnss弱信号跟踪处理,并进行观测量解算,再将解算后的观测量输出给gnss导航定位模块,最终实现gnss信号的精确导航定位。
75.如图4所示,上述步骤s3具体包括:s31.利用射频模块对低轨卫星信号进行低噪声放大和下变频处理,并输出数字中频信号;
76.s32.利用时钟管理模块为射频模块提供采样时钟信号,并为系统级导航芯片提供基带工作时钟信号;
77.s33.利用系统级导航芯片对数字中频信号的同向和正交两路信号进行捕获跟踪、同步、译码,分别得到低轨卫星的导航电文信息和时间信息以及gnss导航星的导航电文信息和时间信息;
78.s34.根据低轨卫星的导航电文信息对低轨卫星信号的观测量进行解算;
79.s35.利用系统级导航芯片的单星定位模块根据观测量获得定位授时结果;
80.s36.根据定位授时结果和gnss导航星的导航电文信息,计算得到gnss导航星的相位和多普勒信息。
81.如图5所示,上述步骤s36中获得gnss导航星相位的过程为:
82.s3611.利用gnss导航星的导航电文信息和时间信息,计算得到gnss导航星位置ps;
83.s3612.根据gnss导航星位置ps和导航装置位置pr计算得到粗略的伪距ρ1:ρ1=||pr-ps||/c,其中c为光速;
84.s3613.考虑电离层δt
t
、对流层δti和卫星钟差δts的影响,对伪距ρ1进行修正,根据公式ρ2=ρ1+(δt
t
+δti+δts)*c计算得到修正后的伪距ρ2;
85.s3614.根据伪距ρ2计算得到粗略的传播时间t1,t1=ρ2/c;
86.s3615.重复迭代步骤s3611~s3614,获得精确的传播时间t2,结合导航装置的接收时间tr可得到发射时间ts,ts=t
r-t2,根据发射时间ts获得初始码相位。
87.如图6所示,上述步骤s36中获得gnss导航星多普勒信息的过程为:s3621.获取gnss导航星准确相位的计算方法中迭代后得到的精确的gnss导航星的位置速度;
88.s3622.根据gnss导航星的位置速度和导航装置的位置速度信息,根据gnss导航星和导航装置的相对位置(d
x
,dy,dz)信息以及gnss导航星和导航装置的相对速度(d
vx
,d
vy
,d
vz
)信息计算得到gnss卫星粗略的多普勒d1,为:
89.λ为gnss载波波长;
90.s3623.考虑导航装置的时钟漂移的影响δd,对粗略的多普勒d1进行修正,根据公式d2=d1+δd计算得到修正后准确的多普勒d2。
91.gnss导航星准确的码相位和多普勒输入给捕获模块,捕获模块的频率搜索器根据精确的多普勒频移信息快速完成频率锁定,捕获模块的码相关器根据精确的初始码相位快速完成与本地码的相关,启用跟踪模块,实现快速捕获跟踪gnss导航星信号;
92.gnss导航星的准确相位输入给捕获模块,捕获模块的码相关器根据精确的初始码相位和电文信息进行长时相干积分,同时跟踪模块同样进行长时间相干积分,实现微弱的gnss导航星信号的捕获和稳定跟踪;
93.对稳定跟踪下的gnss导航星信号进行解算,得到伪距、多普勒等观测量信息;
94.根据gnss导航星观测量结合导航星电文信息,进行定位解算;
95.通过上述工作流程,完成弱信号下的gnss导航定位。
96.以上所述仅为本发明的一个实施方式而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包括在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1