一种水利监理用坡度测量装置及其测量方法与流程
1.本技术涉及监理用测量仪器的技术领域,尤其是涉及一种水利监理用坡度测量装置及其测量方法。
背景技术:
2.在水利监理领域经常需要对施工完成的护坡等倾斜建筑进行坡度测量,护坡的坡度,坡度是用于表现地表单元陡缓的程度的参数,坡度是坡面的垂直高度和水平方向距离的比值,即坡角的正切值。
3.相关的坡度测量可通过测量护坡的垂直高度和水平长度,从而计算得出,但对于堤岸等建筑结构,涉及尺寸较大,测量较为不便。坡度测量能够通过测量坡角计算得出,通过在护坡上设置多个测量点,每个测量点通过设置经纬仪和测距仪,能够测出多个测量点之间的水平距离和竖直高度差,进而计算出护坡整体的坡度。
4.上述中的相关技术方案存在以下缺陷:坡度的测量过程中需要在倾斜的护坡上设置测量点和测量装置,监理人员在倾斜的斜面上移动不便,耗时较多。
技术实现要素:
5.为了方便监理人员测量护坡坡度,本技术提供一种水利监理用坡度测量装置及其测量方法。
6.本技术提供的一种水利监理用坡度测量装置采用如下的技术方案:一种水利监理用坡度测量装置,包括收卷机构、定位机构、配重机构和软尺,软尺一端安装在收卷机构中,另一端与配重机构连接,定位机构包括摇臂,摇臂一端转动连接在收卷机构上,摇臂上安装有测量模块,测量模块用于测量摇臂上远离收卷机构的一端到配重机构的距离。
7.通过采用上述技术方案,通过在软尺一端设置收卷机构,在软尺另一端设置配重机构,使用人员能够手持收卷机构,将配重机构设置在护坡的斜面上,使配重机构沿斜面自然下落,进而使软尺绷直,使用人员能够测量配重机构到收卷机构的距离,通过在收卷机构上设置摇臂,使摇臂能够转动并保持在水平状态,使用人员能够通过测量模块测量摇臂上远离收卷机构的一端到配重机构的间距,进而构建出三角形并计算摇臂和软尺所呈夹角,摇臂和软尺的夹角可近似视为收卷机构到配重机构之间的护坡的坡度,使用人员通过收卷软尺达到调整配重机构位置的效果,能够方便快速地在护坡上多次测量并计算坡度,达到方便监理人员测量护坡坡度的效果。
8.可选的,收卷机构包括盒体和收卷辊,收卷辊转动连接在盒体中,软尺一端贯穿盒体并固定在收卷辊上,收卷辊用于收卷或放出软尺。
9.通过采用上述技术方案,通过在盒体中转动连接收卷辊,使软尺端部连接在收卷辊上,使收卷辊能够转动并将软尺收卷在收卷辊上,进而方便使用人员收纳软尺。
10.可选的,盒体上设置有摇把,摇把贯穿盒体并同轴连接在收卷辊上,摇把位于盒体
外。
11.通过采用上述技术方案,通过在盒体上设置摇把,使摇把同轴连接在收卷辊上,使用人员能够通过摇把转动收卷辊,进而使收卷辊能够正反转,从而达到控制软尺收纳和放出的效果,达到控制配重机构在护坡上所在位置的效果。
12.可选的,盒体上设置有握把,握把位于盒体上远离地面的一侧上。
13.通过采用上述技术方案,通过在盒体上设置握把,使用人员能够通过握把将盒体抵接在护坡的斜面上,达到固定盒体的效果,减少盒体在测量过程中移动的几率,提升测量数据的准确度。
14.可选的,盒体上安装有转轴,转轴位于盒体外侧壁上,转轴贯穿摇臂,转轴上螺纹连接有抵接螺母,抵接螺母用于和盒体夹持并固定摇臂。
15.通过采用上述技术方案,通过在盒体上安装转轴,使摇臂通过转轴转动连接在盒体上,通过在转轴上的端部开设螺纹,使抵接螺母通过螺纹连接在转轴上,能够使抵接螺母和盒体夹持摇臂,进而使摇臂保持在水平状态。
16.可选的,摇臂上设置有水平仪,水平仪用于表示摇臂是否位于水平状态。
17.通过采用上述技术方案,通过在摇臂上设置水平仪,使水平仪能够表示摇臂的状态,使用人员能够转动摇臂并观察水平仪,从而使摇臂能够转动至水平状态,方便使用。
18.可选的,配重机构包括配重块和万向球,软尺端部连接在配重块上,万向球滚动连接在配重块上,万向球用于减小配重块与护坡的摩擦力。
19.通过采用上述技术方案,通过在配重块上滚动连接万向球,使万向球能够抵在护坡上,进而使配重块在护坡上通过万向球与护坡接触,使配重块与护坡的摩擦转化为滚动摩擦,减少配重块在护坡上滑动的摩擦力,能够使配重块依靠自重快速调整至收卷机构正下方,从而提升软尺记录数值的准确性。
20.本技术提供的一种水利监理用坡度测量装置的测量方法采用如下的技术方案:一种水利监理用坡度测量装置的其测量方法,包括以下步骤:s1:将收卷机构设置在护坡上侧,使配重机构沿护坡斜面自然下落;s2:使摇臂转动至水平状态并保持固定;s3:待配重机构拉直软尺并保持静止后,通过测量模块测量配重机构到摇臂端部的距离;s4:记录摇臂的长度、软尺的读数和测量模块测出的距离,计算摇臂与软尺形成夹角的读数;s5:使配重机构沿斜面上下移动,从而调整配重机构所在位置;s6:等配重机构位置改变并保持静止后,再次计算摇臂与软尺形成夹角,根据多组数据判断护坡斜面的施工质量。
21.通过采用上述技术方案,通过将收卷机构设置在护坡上侧,使配重机构在护坡上自然滑动并绷直软尺,使用人员能够通过软尺记录收卷机构到配重机构的距离,通过调整定位机构,使摇臂调整为水平状态,使用人员通过测量摇臂和软尺的夹角,能够近似得出收卷机构和配重机构之间的护坡坡度,使用人员通过控制软尺放出部分的长度,能够使软尺拉动配重块在护坡上移动,进而方便使用人员测量多组数据并判断施工质量。
22.综上所述,本技术的有益技术效果为:
1.通过在软尺一端设置收卷机构,在软尺另一端设置配重机构,使用人员能够手持收卷机构,将配重机构设置在护坡的斜面上,使配重机构沿斜面自然下落,进而使软尺绷直,使用人员能够测量配重机构到收卷机构的距离,通过在收卷机构上设置摇臂,使摇臂能够转动并保持在水平状态,使用人员能够通过测量模块测量摇臂上远离收卷机构的一端到配重机构的间距,进而构建出三角形并计算摇臂和软尺所呈夹角,摇臂和软尺的夹角可近似视为收卷机构到配重机构之间的护坡的坡度,使用人员通过收卷软尺达到调整配重机构位置的效果,能够方便快速地在护坡上多次测量并计算坡度,达到方便监理人员测量护坡坡度的效果;2.通过在盒体上设置摇把,使摇把同轴连接在收卷辊上,使用人员能够通过摇把转动收卷辊,进而使收卷辊能够正反转,从而达到控制软尺收纳和放出的效果,达到控制配重机构在护坡上所在位置的效果;3.通过在配重块上滚动连接万向球,使万向球能够抵在护坡上,进而使配重块在护坡上通过万向球与护坡接触,使配重块与护坡的摩擦转化为滚动摩擦,减少配重块在护坡上滑动的摩擦力,能够使配重块依靠自重快速调整至收卷机构正下方,从而提升软尺记录数值的准确性。
附图说明
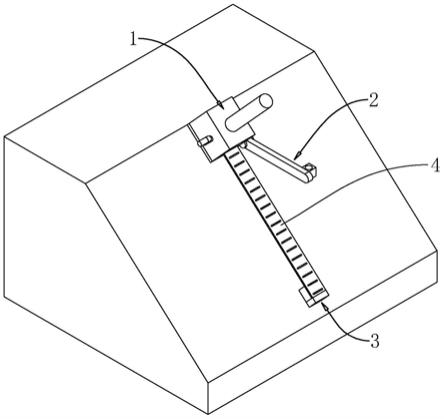
23.图1是本技术实施例的使用状态示意图。
24.图2是本技术实施例的结构示意图一。
25.图3是本技术实施例的结构示意图二。
26.图4是本技术实施例的逻辑框图。
27.附图标记:1、收卷机构;11、盒体;12、收卷辊;121、摇把;13、握把;2、定位机构;21、摇臂;211、转轴;212、抵接螺母;22、水平仪;3、配重机构;31、配重块;32、万向球;4、软尺;5、测量模块;51、信号发射端;52、信号接收端;6、计算模块。
具体实施方式
28.以下结合附图1-4对本技术作进一步详细说明。
29.本技术实施例公开一种水利监理用坡度测量装置。参照图1和图2,包括收卷机构1、定位机构2、配重机构3、软尺4和测量模块5。软尺4具有柔性,软尺4一端安装在收卷机构1上,另一端与配重机构3连接,收卷机构1用于收卷并放出软尺4。使用人员将收卷机构1设置在护坡的上侧,使配重机构3沿护坡的斜面自然下落,进而使软尺4拉直并保持在相对护坡斜面平行的倾斜状态,使用人员能够位于护坡上侧读取读数并记录收卷机构1与配重机构3的间距。定位机构2包括摇臂21,摇臂21一端转动连接在收卷机构1上,测量模块5包括信号发射端51和信号接收端52,信号发射端51安装在摇臂21上远离收卷机构1的一端上,信号接收端52安装在配重机构3上,测量模块5能够测量摇臂21端部至配重机构3的直线距离。
30.图3和图4,测量模块5上通信连接有计算模块6,计算模块6用于接收测量模块5的数据,计算模块6可选用控制器、笔记本电脑等设备,计算模块6中预设有用于计算摇臂21与软尺4形成夹角的计算规则,使用人员通过在计算模块6中输入摇臂21的长度和软尺4的读数,使计算模块6能够计算出信号发射端51和信号接收端52连线、软尺4和摇臂21形成三角
形的详细数据,进而能够得出护坡的坡度。
31.参照图1和图2,收卷机构1包括盒体11、收卷辊12和握把13,收卷辊12转动连接在盒体11中,盒体11上开设有开口,软尺4一端通过开口插入至盒体11中,软尺4端部固定连接在收卷辊12上。软尺4上读数逐渐变大的一端固定在盒体11中,使用人员通过处于护坡上侧并手持盒体11,能够读取软尺4的读数,进而方便记录收卷机构1和配重机构3的间距。握把13安装在盒体11的上顶面上,使用人员手握握把13,能够将盒体11抵接并固定在倾斜的护坡上。收卷辊12上设置有摇把121,摇把121位于盒体11外,摇把121贯穿盒体11侧壁并连接在收卷辊12上,使用人员通过转动摇把121,能够控制收卷辊12正反转,进而控制软尺4从盒体11中放出或收入盒体11中,进而达到控制配重机构3位置的效果,使用人员通过将配重机构3拉至不同位置,能够测量多组数据,进而使测量坡度更加精准。
32.参照图2和图3,定位机构2还包括水平仪22,水平仪22固定在摇臂21上,使用人员能够转动摇臂21并观察水平仪22,直至水平仪22读数为处于水平状态,此时摇臂21即转动至水平状态。盒体11上安装有转轴211,转轴211一端固定在盒体11外侧壁上,转轴211的长度方向与软尺4延伸方向垂直。转轴211贯穿摇臂21,从而使摇臂21通过转轴211转动连接在盒体11上。转轴211上远离盒体11的一端伸出至摇臂21外,转轴211上远离盒体11的一端上开设有螺纹,转轴211上螺纹连接有抵接螺母212,抵接螺母212设置在摇臂21上远离盒体11的一侧,使用人员转动摇臂21至水平状态后,通过转动抵接螺母212,使抵接螺母212抵在摇臂21上,进而使抵接螺母212和盒体11夹持摇臂21,达到将摇臂21固定至水平状态的效果。
33.参照图2和图3,配重机构3包括配重块31和万向球32,软尺4上远离配重块31用于靠自重拉直软尺4,使软尺4绷直,进而提升软尺4测量收卷机构1和配重机构3的间距的准确度。万向球32嵌入配重块31上靠近地面的一侧上,万向球32能够在配重块31上自由回转。当配重块31设置在护坡上时,万向球32抵在护坡的斜面上并自由转动,进而使配重块31能够凭借自重下落,万向球32能够减少配重块31与护坡斜面的摩擦力,使软尺4在配重块31的自重作用下处于与护坡的斜面平行的状态。
34.参照图3和图4,测量模块5通过超声波测距的原理进行距离测量。信号发射端51安装在摇臂21上远离盒体11的一端上,信号发射端51为发送传感器(又称波发送器),发送传感器中设置有压电晶体,通过将电能转化为机械能振荡,进而产生并发射超声波。信号接收端52安装在配重块31上,信号接收端52为接收传感器(又称波接收器),接收传感器由陶瓷振子换能器和放大电路组成,陶瓷振子换能器接收超声波并产生机械振动,通过将机械振动转化为电能量,作为接收传感器的输出。信号接收端52上连接有无线传输模块,无线传输模块可设置为wifi、蓝牙等无线信号发射器,信号接收端52通过无线传输模块与计算模块6通信连接。在其他实施例中,也可在信号接收端52和计算模块6之间设置电线,通过电线传递电信号,达到通信连接的目的。信号接收端52将电信号输出至计算模块6中,使计算模块6能够得知测量模块5测量的数据并进行计算。
35.参照图1和图4,转轴211的位置与盒体11的开口重合,进而使摇臂21端部与配重块31连线、摇臂21和软尺4能够形成三角形。计算模块6设置为控制器,控制器中存储有用于计算护坡坡度的计算规则,使用人员首先将摇臂21的长度输入控制器中,定义为a,再将软尺4的读数,即收卷机构1与配重机构3的间距定义为b,计算模块6能够接收测量模块5发出的电信号,从而得知信号发射端51到信号接收端52的距离,定义为c,此时,以信号发射端51的位
置、信号接收端52的位置和转轴211的位置为顶点,可模拟出一个三角形,摇臂21与软尺4形成夹角定义为角1,计算模块6通过海伦公式计算三角形的面积,进而能够得出角1所在的直角三角形的直角边边长,最终通过计算角1的sin值和cos值,能够计算出角1的角度。使用人员通过控制软尺4的长度,能够使配重机构3位于护坡上不同位置,进而使计算模块6计算配重机构3位于不同位置时角1的角度,通过多次测量后,使用人员能够得知护坡的坡度及其变化范围,方便使用人员进行施工监理和验收。
36.本技术实施例的实施原理为:通过将软尺4连接在收卷机构1上,在软尺4上远离收卷机构1的一端设置配重机构3,使用人员能够手持收卷机构1,使配重机构3沿护坡斜面自由下滑,从而使软尺4绷直,通过使测量模块5测量摇臂21端部到配重块31的间距,使计算模块6能够接收测量模块5测量的数据并计算,进而能够护坡的坡度变化范围,从而方便监理人员测量数据。
37.本技术实施例还公开一种水利监理用坡度测量装置的其测量方法,包括以下步骤:s1:将收卷机构1设置在护坡上侧,使配重机构3沿护坡斜面自然下落;s2:转动抵接螺母212,使摇臂21能够转动,通过观察水平仪22使摇臂21转动至水平状态,再次旋拧抵接螺母212,使摇臂21保持在水平状态;s3:等待万向球32在护坡上滑动,待配重机构3拉直软尺4并保持静止后,通过测量模块5测量配重块31到摇臂21上远离盒体11的一端端部的距离;s4:将摇臂21的长度、软尺4的读数和测量模块5测出的距离输入至计算模块6中,计算模块6计算摇臂21与软尺4形成夹角的读数;s5:使用人员转动摇把121,使配重机构3沿斜面上下移动,从而调整配重机构3所在位置;s6:等配重机构3位置改变并保持静止后,使计算模块6再次计算摇臂21与软尺4形成夹角,根据多组数据判断护坡斜面的施工质量。
38.本实施例的实施原理为:通过将收卷机构1设置在护坡上方,使用人员能够通过握把13将盒体11抵接在护坡上,通过使配重机构3沿护坡下滑,进而使软尺4绷直,通过调整摇臂21位置,使摇臂21与软尺4形成夹角可近似看作护坡的坡度,使用人员通过控制收卷辊12转动,能够调整配重机构3位置,进而使计算模块6能够计算配重机构3位于不同位置时护坡的坡度,进而方便使用人员测量数据并判断护坡的施工质量。
39.本具体实施方式的实施例均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1