气体采样装置
1.本实用新型一般涉及气体采样技术领域,具体涉及一种气体采样装置。
背景技术:
2.目前,在港口、海关等人流密集场所,可使用检疫型机器人对箱包中可能携带的能够挥发出气味分子的违禁品进行查验。在查验时,安检人员需要将吸气采样管的端头插入被测箱包的拉链缝中,进行吸气检测,存在损坏旅客箱包中物品的可能性,同时,还存在不同旅客箱包内物品交叉污染的风险。
技术实现要素:
3.本技术期望提供一种气体采样装置,用于解决现有技术中通过穿刺的方式进行气体采样,存在损伤被检测物品及交叉污染等问题。
4.第一方面,本实用新型提供一种气体采样装置,包括:
5.采样部件,具有采样端面,所述采样端面上设置有采样口;
6.气体采样位置确定单元,用于获取待检测对象的图像,以确定所述待检测对象外侧的气体采集位置;
7.驱动机构,用于驱动所述采样部件,使所述采样口抵接于所述待检测对象外侧的气体采集位置。
8.作为可实现方式,所述采样部件至少在采样端面的一侧为柔性结构。
9.作为可实现方式,所述气体采样位置确定单元包括深度相机。
10.作为可实现方式,所述气体采样位置确定单元还包括下面所述的计算模块或通信模块中的至少一者:
11.计算模块,通过所述深度相机获取的深度信息可以确定所述待检测对象外侧的气体采集位置的空间方位;
12.通信模块,将所述深度相机获取的深度信息发送给远程服务器,并接收远程服务器计算得到的所述待检测对象外侧的气体采集位置的空间方位。
13.作为可实现方式,还包括可移动的主体,所述气体采样位置确定单元及所述驱动机构均设置于所述主体上。
14.作为可实现方式,所述驱动机构包括机械臂,所述机械臂具有安装端和执行端,所述安装端与所述主体连接,所述执行端连接所述采样部件。
15.作为可实现方式,所述待检测对象为箱包,所述气体采集位置为所述箱包的拉链位置。
16.作为可实现方式,所述采样口为长方形口。
17.作为可实现方式,还包括气体分析仪,与所述采样部件连通,用于对所述采样部件抽取的气体进行成份分析。
18.作为可实现方式,还包括报警装置,用于在所述气体分析仪分析出所述抽取的气
体具有预定成份时,进行声和/或光报警。
19.上述方案,采样部件的采样口用于抵接在,待检测对象外侧的气体采集位置进行气体采样,其为非侵入式的采样方案,不会对检测对象内部的物品等造成损伤,以及避免因对检测对象内部的物品等造成损伤而导致的交叉污染的问题发生。
附图说明
20.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
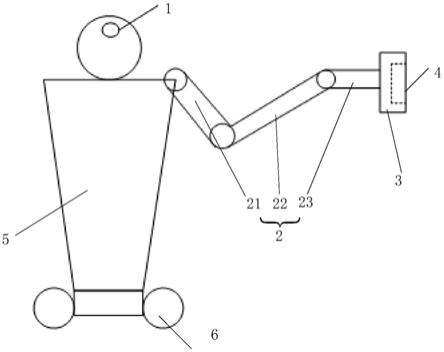
21.图1为本实用新型实施例提供的气体采样装置的示意图;
22.图2为本实用新型实施例提供的采样部件的主视图。
具体实施方式
23.下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关实用新型,而非对该实用新型的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与实用新型相关的部分。
24.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
25.如图1、图2所示,本实用新型实施例示出的一种气体采样装置,包括:采样部件3、气体采样位置确定单元1及驱动机构2。
26.采样部件3,具有采样端面4,采样端面4上设置有采样口7,这里不对采样部件3的具体形状进行限定,只要其具有一个采样端面4,并且在该采样端面4上设置有采样口7即可,采样口7用于对待检测对象进行抽气。
27.气体采样位置确定单元1,用于获取待检测对象的图像,以确定待检测对象外侧的气体采集位置。气体采样位置确定单元1具有视频拍摄的功能,其可以对待检测对象进行视频拍摄,来获得待检测对象的图像。该待检测对象的图像可以但不限于具有深度信息,通过该深度信息可以确定待检测对象外侧的气体采集位置在空间中的具体位置,也可以是气体采集位置的空间坐标,该空间坐标可以是相对于驱动机构2的坐标,也可以是相对于空间内某一固定位置的坐标。具体地,气体采样位置确定单元1还包括下面所述的计算模块或通信模块中的至少一者:计算模块,通过深度相机获取的深度信息可以确定所述待检测对象外侧的气体采集位置的空间方位;通信模块,将深度相机获取的深度信息发送给远程服务器,并接收远程服务器计算得到的所述待检测对象外侧的气体采集位置的空间方位。通信模块和远程服务器之间的通信方式可以采用无线或有线的方式,其中,无线方式包括gprs(general packet radio service;通用无线分组业务)、4g(the4th generation mobile communication technology;第四代移动通信技术)5g(the 5th generation mobile communication technology;第五代移动通信技术)、wifi(ieee 802.11标准的无线局域网技术)或zigbee(紫蜂网络)等方式。
28.驱动机构2,用于驱动采样部件3,使采样口7抵接于气体采集位置。这是所说的驱动采样部件3是指,通过驱动机构2来调整采样部件3的空间位置,使采样部件3的采样口7抵接在待检测对象外侧的气体采集位置,以供采样口7通过气体采集位置对待检测对象进行
抽气采样。这里所说的抵接是指,采样口7抵在待检测对象外侧的气体采集位置,并与气体采集位置之间具有一定的压力,以使待检测对象外侧的气体采集位置与采样口7之间具有一定的密封效果,使得采样口7比较顺利的对待检测对象进行抽气采样,减少环境气体的干扰。
29.上述方案,采样部件3的采样口7用于抵接在待检测对象外侧的气体采集位置进行气体采样,其为非侵入式的采样方案,不会对检测对象内部的物品等造成损伤,以及避免因对检测对象内部的物品等造成损伤而导致的交叉污染的问题发生。
30.作为可实现方式,为了防止采样部件3损伤到待检测对象,且使待检测对象的气体采集位置与采样口7之间具有一定的密封效果,在采样部件3至少在采样端面4的一侧为柔性结构。当然,整个采样部件3都可以为柔性结构,该柔性结构例如但不限于采用橡胶、硅胶等材料制作。
31.作为可实现方式,气体采样位置确定单元1包括深度相机。采用深度相机,其拍摄的图像中既有物体的画面信息,画面信息中每一像素又对应有深度信息,也可称为景深距离。通过画面信息来识别出特定的物体及部位,例如,该示例中,需要在箱包的拉链处进行抽气采样,拉链的位置为气体采集位置,通过视觉识别的方式,识别出箱包拉链的位置,由于画面信息中每一像素又对应有深度信息,则通过拉链对应像素的深度信息,来确定拉链的坐标。例如,以深度相机的安装位置作为空间坐标系的原点,那么空间坐标系与深度相机的相机坐标系之间的位置关系是固定的,画面信息中每一像素又对应有深度信息一般是相对于相机坐标系的坐标信息,通过将识别出来的目标物体,即该示例中的拉链的相机坐标系的坐标信息转换为空间坐标系的坐标信息,也即得到了拉链相对于相机的具体空间位置,在此情况下,驱动机构2可以根据拉链的空间具体位置,将采样部件3的采样口7抵接在拉链上。
32.作为可实现方式,为了便于移动该气体采样装置,该气体采样装置还包括可移动的主体5,气体采样位置确定单元1及驱动机构2均设置于所述主体5上。该主体5的底部设置有多个轮子6以实现移动的功能。例如但不限于,部分轮子6为万向轮。该些轮子6是可以具有动力驱动的,也可以是没有动力驱动的,在采用没有动力驱动的轮子6时,需要人工来推动该气体采样装置进行位置移动。在采用具有动力驱动的轮子6时,该气体采样装置可以独立的进行位置移动。
33.作为可实现方式,驱动机构2包括机械臂,机械臂具有安装端和执行端,安装端与主体5连接,执行端连接所述部件。例如但不限于,该机械臂包括顺次活动连接的第一臂21、第二臂22及第三臂23。第一臂21远离第二臂22的一端为安装端,其与主体5连接,第三臂23远离第二臂22的一端为执行端,该段连接采样部件3。一般地,顺次活动连接的第一臂21、第二臂22及第三臂23可以具有空间内的六个自由度,以驱动采样部件3到达空间内不同角度的位置,以适应待检测对象的不同放置位置。
34.作为可实现方式,待检测对象为箱包,气体采集位置为箱包的拉链位置。这里所说的箱包例如但不限于为行李箱、手提包、背包等。
35.作为可实现方式,为了适应对拉链位置的采样,例如但不限于采样部件3为一长方体部件,采样口7可以采用矩形口,尤其是矩形口中的长方形口。
36.作为可实现方式,还包括气体分析仪,与采样部件3连通,用于对采样部件3抽取的
气体进行成份分析。需要说明的是,可以根据需要分析的气体成份来具体的选择气体分析仪。
37.作为可实现方式,还包括报警装置,用于在气体分析仪分析出抽取的气体具有预定成份时,进行声和/或光报警。例如,在气体分析仪分析出箱包内有某种挥发性气体,如酒精等时,气体采样装置上设置的喇叭、报警灯等工作,以发出声和/或光报警,提醒工作人员箱包内具有违禁物品。
38.需要理解的是,上文如有涉及术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
39.以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本技术中所涉及的实用新型范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1