一种智能三维磁场测量仪系统的制作方法
1.本实用新型涉及电子技术应用与实验应用的领域,尤其涉及一种智能三维磁场测量仪系统。
背景技术:
2.从最原始利用磁力的测量方法,到现在磁场的测量技术已经取得快速的发展,其应用领域也迅速扩展,如今磁场测量技术已经广泛应用于和物理研究、机电制造和电磁环境监测等测试领域,此外磁场测量在无损检测、生物医学、环境电磁污染监测等领域也发挥重要作用。
3.随着科学技术的发展和各种高新技术的引入,越来越多的电磁场研究更加偏向于三维动态磁场的分布,而传统的磁场测量的特斯拉计、高斯计等仪器,难以满足多点和动态磁场的测量要求。
4.到现在为止,常用的脉冲磁场测量方法主要有霍尔效应法、电磁感应法、磁光效应法和磁阻效应等。但电磁感应的探头一般都是面积相对较大的线圈,测量精度不高;磁光效应法的优点是测试精度较高,反应速度快,但是需要前期校准,且测试设备复杂。目前精确的磁场测量系统主要依赖进口,价格昂贵,而且大多数系统只能测量单个点的一维或二维磁场,空间三维磁场的分布情况需要通过多次测量和复杂的数据处理才能得到,无法实现快速扫描测量,更无相关实验测量系统。
5.针对以往磁场测量仪器只对磁场中单点一维进行测量缺点,设计了测量三维磁场矢量以及可以反映磁场分布的测量装置,本实用新型采用线性霍尔传感器组作为测量探头,应用霍尔效应来测量磁场,线性霍尔器件由于灵敏度高、体积小的特点,适用于进行点磁场测量,同时它的适应频率和稳点范围宽,分辨率高,不但可测量点磁场和缝隙中的磁感应强度,而且还可以测最恒定磁场和交变磁场,适应性强。
技术实现要素:
6.本实用新型意在提供一种智能三维磁场测量仪系统,解决现有的基于传感器局部坐标系测量值不足的问题。
7.为达到上述目的,本实用新型提供如下技术方案:
8.一种智能三维磁场测量仪系统,其特征在于:包括三维霍尔传感器探头、测量主机系统和扫描平台,所述三维霍尔传感器探头是一个立方体形状的线性探头,探头的表面粘贴有三片贴片式霍尔传感器,分别分布于立方体xyz三个表面的中心;
9.所述测量主机系统用于控制整个测量系统的稳定运行以及数据的收集处理,包括:包括数据处理模块、单片机、微处理器、运动控制模块和通信模块,其中:
10.所述数据处理模块包括信号调理模块和a/d转换模块,其中:所述三维霍尔传感器探头与信号调理模块电性连接,用于将探头采集到的数据发送给信号调理模块并将信号进行放大;所述信号调理模块与a/d转换模块电性连接,用于所述信号调理模块将放大后的信
号发送给a/d转换模块,所述a/d转换模块再将信号进行a/d转换;
11.所述运动控制模块与扫描平台电性连接,用于所述运动控制模块控制扫描平台的三维扫描运动;
12.所述通信模块包括nb
‑
iot模块,用于将计算得到的数据发送至物联网平台;
13.所述微处理器设置在单片机内部,并分别与a/d转换模块、运动控制模块和通信模块电性连接;
14.所述扫描平台用于搭载测量载物台和测量主机系统,并由微处理系统控制实现三维磁场的扫描测量。
15.采用本技术方案,采用一个由3个霍尔传感器组成的三维霍尔传感器探头,当被测永磁体至于扫描平台上时,测量主机系统利用运动控制模块控制扫描平台带动三维霍尔探头做三维扫描运动,检测被测永磁体周围各点x、y、z三个方向上的磁场强度,并以单片机作为仪器的总控芯片控制数据处理模块的开启,将采集的数据进行放大和a/d转换并将数据发送至上位机进行进一步处理,同时通过nb
‑
iot通讯模块将数据上传至云平台。
16.优选地,所述扫描平台包括载物台和支架,所述支架包括底座和支撑柱,所述载物台设置在底座上侧,所述支撑柱与底座滑动连接,所述支撑柱上滑动连接有一运动导轨,所述运动导轨的自由端设有一步进电机,所述运动导轨上滑动套接有一滑块,所述滑块的一侧固定连接有一延伸杆,所述延伸杆的自由端固定有三维霍尔传感器探头。
17.扫描平台用以搭载载物台和测量系统,并由微处理系统控制实现三维磁场的扫描测量,驱动电路驱动步进电机运行,步进电机控制支撑柱、运动导轨和滑块的运动,以控制三维霍尔传感器探头在整个立体空间上运动,对被测物体周围的磁场进行全方位的测量。
18.优选地,所述底座上侧边缘设有水平方向的滑动杆,所述支撑柱的一侧设有垂直方向的滑动杆,所述支撑柱的底部和运动导轨的一端设有与滑动杆相配合的通孔并滑动套接在滑动杆上,所述滑动杆的两端和运动导轨的两端均设有限位开关。
19.底座和支撑柱、支撑柱和运动导轨之间滑动套接,限位开关能限制支撑柱、运动导轨和滑块的运动范围,并能判断滑块的位置。
20.本实用新型专利具有以下优点:
21.1、该装置不仅可以测量某一点的三维磁场分布,还可以扫描测量出整个空间任一点的三维磁场分布。
22.2、使用了目前热门的物联网技术,可直接将测量数据通过nb
‑
iot通讯模块将磁场数据发送至物联网平台。
附图说明
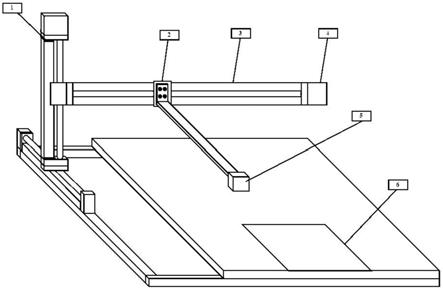
23.图1为本实用新型实施例提供的三维扫描仪整体外观图;
24.图2为本实用新型实施例提供的三维霍尔传感器探头结构示意图;
25.图3为本实用新型实施例提供的工作流程示意图。
具体实施方式
26.下面结合附图和实施方式对本实用新型作进一步的详细说明:
27.说明书附图中的附图标记包括:限位开关1、滑块2、运动导轨3、步进电机4、三维霍
尔传感器探头5、载物台6、贴片式霍尔传感器7。
28.如图1至图3所示的,一种智能三维磁场测量仪系统,包括三维霍尔传感器探头、测量主机系统和扫描平台,三维霍尔传感器探头是一个立方体形状的线性探头,探头的表面粘贴有三片贴片式霍尔传感器,分别分布于立方体xyz三个表面的中心;
29.测量主机系统用于控制整个测量系统的稳定运行以及数据的收集处理,包括:包括数据处理模块、微处理器和运动控制模块,其中:
30.数据处理模块包括信号调理模块和a/d转换模块,其中:三维霍尔传感器探头与信号调理模块电性连接,用于将探头采集到的的数据发送给信号调理模块并将信号进行放大;信号调理模块与a/d转换模块电性连接,用于所述信号调理模块将放大后的信号发送给a/d转换模块,a/d转换模块再将信号进行a/d转换;
31.运动控制模块与扫描平台电性连接,用于运动控制模块控制扫描平台的三维扫描运动;
32.通信模块包括nb
‑
iot模块,用于将计算得到的数据发送至物联网平台;
33.微处理器设置在单片机内部,并分别与a/d转换模块、运动控制模块和通信模块电性连接;
34.扫描平台用于搭载测量载物台和测量主机系统,并由微处理系统控制实现三维磁场的扫描测量。
35.扫描平台包括载物台6和支架,支架包括底座和支撑柱,载物台6设置在底座上侧,底座上侧边缘设有水平方向的滑动杆,支撑柱的一侧设有垂直方向的滑动杆,支撑柱的底部和运动导轨3的一端设有与滑动杆相配合的通孔并滑动套接在滑动杆上,支撑柱上滑动连接有一运动导轨3,运动导轨3的自由端设有一步进电机4,运动导轨3上滑动套接有一滑块2,滑块2的一侧固定连接有一延伸杆,延伸杆的自由端固定有三维霍尔传感器探头5,滑动杆的两端和运动导轨3的两端均设有限位开关1。
36.具体实施过程如下:
37.先将单片机分别与运动控制模块和nb
‑
iot通讯模块电性连接、运动控制模块和步进电机4电性连接以及三维霍尔传感器探头和a/d转换电路电性连接,再把测量固件搭载在载物台6上,测量系统启动后,三维扫描平台将按照设定好的程序启动三维扫描装置带动三维霍尔传感器探头5做机械扫描运动,由于霍尔传感器的霍尔效应,系统的输出电压将和被测磁场成线性变化,通过信号处理模块将电压信号滤波放大后进入单片机a/d转换模块,转换后的数据将由单片机将获取的三维磁场数据发送至计算机进行进一步处理,同时由nb
‑
iot模块将磁场数据发送至物联网平台,当一次扫描完成后,主机会生成整个空间内的三维磁场分布,实现了在磁场测量过程中可对霍尔传感器探头的空间位置进行调整,同时给出基于空间坐标的三维磁场值和测量点空间坐标,解决了基于传感器局部坐标系测量值不足的问题。
38.以上所述的仅是本实用新型的实施例,方案中公知的具体技术方案和/或特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本实用新型技术方案的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1