场内电动搬运车转向力测试仪的制作方法
1.本实用新型涉及检测仪器相关技术领域,具体涉及一种场内电动搬运车转向力测试仪。
背景技术:
2.随着我国经济的飞速发展,工业搬运车辆在各类港口、机场、车站、货场、工厂、物流中心等场所被广泛应用,特别是对成件托盘货物的装卸、搬运作业、堆垛及短距离运输作业、仓储大型物件的运输的各种轮式厂(场)内电动搬运车辆尤为常用。
3.厂(场)内电动搬运车辆的转向力直接影响其方向操作的舒适性、灵活性及安全性,因其工作环境存在极端差异、金属疲劳、金属腐蚀、机械寿命等均能影响厂内专用机动工业车辆方向的操作,如若厂(场)内电动搬运车辆在行驶中,操纵手柄出现抖动,则转向轮摇摆,严重时方向难以控制,极易造成事故的发生,严重影响人员生命及财产安全。
4.特种设备安全技术规范《厂内专用机动车辆安全技术监察规程(tsg n0001
‑
2017)》中对厂内专用机动工业车辆(即叉车),针对其转向与操作系统中规定:采用动力转向的叉车,转向时作用在操纵手柄上的手操作力应当为6n~20n;左右转向作用力相差不大于5n。
5.传统的厂内专用机动工业车辆转向力的测试仪仅针对厂车圆形方向盘而设计,而忽略了电动叉车操纵手柄的转向力的测量,因此,对厂内电动搬运车操纵手柄转向力的检测成为了特种设备安全技术监察中亟待解决的问题,设计一款便携性好,测量精度高,操作简便,使用高效的创新智能检测仪已刻不容缓。
技术实现要素:
6.本实用新型的目的在于克服上述不足问题,提供一种场内电动搬运车转向力测试仪。
7.本实用新型为实现上述目的所采用的技术方案是:场内电动搬运车转向力测试仪,包括两组对称设置的检测结构,所述检测结构包括锁紧结构、连接杆、受力接触头、压簧、微型压力传感器、壳体、供电模块、主板,所述锁紧结构安装在连接杆一端,所述受力接触头安装在连接杆另一端,所述微型压力传感器、供电模块、主板设置在壳体内,所述微型压力传感器、供电模块均与主板连通,所述壳体上安装有与微型压力传感器对应的压簧座,所述压簧座内安装有压簧,所述受力接触头安插在压簧座内并与压簧相对应,两组所述主板均与人机处理终端连通。
8.所述锁紧结构包括浮动夹紧块,定位支撑块,所述定位支撑块安装在连接杆上,所述定位支撑块上安装有锁紧螺柱,所述锁紧螺柱上安装有锁紧螺母,所述浮动夹紧块位于锁紧螺母与定位支撑块之间,所述浮动夹紧块通过其上开设的定位孔套装在锁紧螺柱上。
9.所述人机处理终端连有打印机。
10.所述壳体内安装有蓝牙无线传输模块,所述蓝牙无线传输模块与主板连通,所述
人机处理终端具有蓝牙模块,所述人机处理终端通过蓝牙模块与蓝牙无线传输模块连通。
11.所述人机处理终端为具有蓝牙模块的手机或平板电脑或笔记本电脑。
12.本实用新型的特点是:具有结构简单、操作便捷、检测精度高、检测效率高、便携性好等特点,能够对场内电动搬运车操纵手柄转向力进行实时检测,并可对测量数据及结果等进行打印、存储及调用,为场内车辆监督检验提供了高效安全可靠技术手段,填补了电动搬运车操纵手柄转向力测量的空白。
附图说明
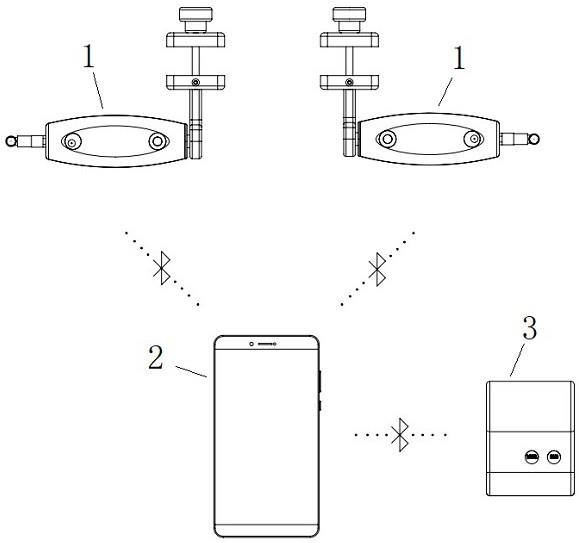
13.图1是本实用新型的结构示意图。
14.图2是本实用新型的检测结构的示意图。
15.图3是本实用新型的检测结构的主视图。
16.图4是本实用新型的检测结构的侧视图。
17.图5是本实用新型的检测结构的俯视图。
18.图6是图3的a处局部放大图。
19.图7是本实用新型的检测结构安装示意图。
20.图8是本实用新型的电路示意图。
21.其中:1、检测结构
ꢀꢀ
10、主板
ꢀꢀ
11、锁紧结构
ꢀꢀ
111、锁紧螺母
ꢀꢀ
112、浮动夹紧块
ꢀꢀ
113、锁紧螺柱
ꢀꢀ
114、定位支撑块
ꢀꢀ
12、连接杆
ꢀꢀ
13、壳体
ꢀꢀ
14、微型压力传感器
ꢀꢀ
15、受力接触头
ꢀꢀ
16、压簧
ꢀꢀ
17、压簧座
ꢀꢀ
18、蓝牙无线传输模块
ꢀꢀ
19、供电模块
ꢀꢀ
2、人机处理终端
ꢀꢀ
3、打印机
ꢀꢀ
4、操纵手柄。
具体实施方式
22.如图1
‑
8所示,本实用新型为一种场内电动搬运车转向力测试仪,包括人机处理终端2以及两组对称设置的检测结构1,检测时,两组检测结构1分别安装在电动搬运车的操纵手柄4的两侧,并与人机处理终端2 连通,所述检测结构1包括锁紧结构11、连接杆12、受力接触头15、压簧16、微型压力传感器14、壳体13、供电模块19、主板10,所述锁紧结构11包括浮动夹紧块112,定位支撑块114,所述定位支撑块114安装在连接杆12一端,所述定位支撑块114上安装有锁紧螺柱113,所述锁紧螺柱113上安装有锁紧螺母111,所述浮动夹紧块112位于锁紧螺母111与定位支撑块114之间,所述浮动夹紧块112通过其上开设的定位孔套装在锁紧螺柱113上,操作时将定位支撑块114靠紧电动搬运车的操纵手柄4,将浮动夹紧块112的定位孔套入锁紧螺柱113,调整位置后将锁紧螺母111锁紧,使检测结构1锁紧在电动搬运车的操纵手柄4上,所述受力接触头15安装在连接杆12另一端,所述微型压力传感器14、供电模块19、主板10设置在壳体13内,所述微型压力传感器14、供电模块19均与主板10连通,所述壳体13上安装有与微型压力传感器14对应的压簧座17,所述压簧座17内安装有压簧16,所述受力接触头15安插在压簧座17内并与压簧16相对应,所述微型压力传感器14能够对作用于电动搬运车的操作手柄上的转向力值进行高精度测量,所述供电模块19为整个检测结构1供电,当拨动检测结构1的壳体13时,操纵手柄4转向力通过锁紧结构11、连接杆12、传递到受力接触头15上,再通过压簧16传递到压簧座17上,压簧座17将力传递到微型压力传感器14,微型压力传感器14将接受到的压力信号传递给主板10,所述壳体13内安装
有蓝牙无线传输模块18,所述蓝牙无线传输模块18与主板10连通,所述人机处理终端2为具有蓝牙模块的手机或平板电脑或笔记本电脑,所述人机处理终端2通过蓝牙模块与蓝牙无线传输模块18连通,主板10将接受到的信号处理后通过蓝牙无线传输模块18传递给人机处理终端2,所述人机处理终端2连有打印机3,所述打印机3为蓝牙打印机,所述人机处理终端2对电动搬运车的操纵手柄4的转向力数据采集、分析及管理,其内置的专用测量软件可对操纵手柄4的转向力的实时值及最大值进行检测,并且可对检测结果进行无线打印、保存、查看及上传等操作。
23.本实用新型操作及实施过程如下:首先通过两组锁紧结构11将两组检测结构1分别锁紧在电动搬运车的操纵手柄4的左右两侧,将两组检测结构1开机,供电模块19给检测结构1供电,人机处理终端2及打印机3开机,并打开人机处理终端2内部的专用测量软件,建立转两组检测结构1、人机处理终端2及打印机3之间的蓝牙无线信号连接,并在测量软件中设置基本信息及检验参数,点击人机处理终端2开始进行测试,操作人员的左右手分别握住两组检测结构1并将电动搬运车的操纵手柄4向左旋转,操纵手柄4的转向力通过左侧的锁紧结构11、连接杆12传递到左侧的受力接触头15上,再通过左侧的压簧16传递到左侧的压簧座17上,左侧的压簧座17将力传递到左侧的微型压力传感器14,左侧的微型压力传感器14将接受到的压力信号传递给左侧的主板10,左侧的主板10将接受到的信号处理后通过左侧的蓝牙无线传输模块18传递给人机处理终端23内的测量软件,测量软件可观察电动搬运车的操纵手柄4向左旋转过程中转向力的实时值及最大值,随后将电动搬运车的操纵手柄4向右旋转,操纵手柄4的转向力通过右侧的锁紧结构11、连接杆12传递到右侧的受力接触头15上,再通过右侧的压簧16传递到右侧的压簧座17上,右侧的压簧座17将力传递到右侧的微型压力传感器14,右侧的微型压力传感器14将接受到的压力信号传递给右侧的主板10,右侧的主板10将接受到的信号处理后通过右侧的蓝牙无线传输模块18传递给人机处理终端23内的测量软件,测量软件可观察电动搬运车的操纵手柄4向右旋转过程中转向力的实时值及最大值,通过测量软件对信号进行处理后得到电动搬运车的操纵手柄4的左右转向过程中转向力的实时值、最大值及左右转向作用力差值等数据,保存测试记录,并可对结果进行查看及检索,亦可通过打印机3打印测试结果。
24.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本实用新型的技术方案及其发明构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1