一种应用于烹饪设备的机械式称重装置的制作方法
1.本实用新型涉及烹饪设备技术领域,尤其涉及一种应用于烹饪设备的机械式称重装置。
背景技术:
2.蒸烤箱要实现智能烹饪,其中一个重要的纬度是食物重量识别。目前不少蒸烤箱产品集成了内胆称重功能,主要采用电子称重方式,即对惠斯通电桥传感器进行差分信号采样实现重量计算,此方法电控设计复杂,芯片和传感器成本较高。
3.为了简化蒸烤箱内胆称重设计,降低产品制造成本,有必要采取机械式称重方式来实现食物重量识别。
技术实现要素:
4.本实用新型旨在至少在一定程度上解决现有相关技术中存在的问题之一,为此,本实用新型提出一种应用于烹饪设备的机械式称重装置,实现食材重量的准确可靠识别的同时,简化机械式称重设计,降低产品制造成本。
5.根据上述提供的一种应用于烹饪设备的机械式称重装置,其通过如下技术方案来实现:
6.一种应用于烹饪设备的机械式称重装置,包括:可上下运动的托盘,用于盛放食材;
7.可转动地码盘,其具有转轴;传动模块,用于联动所述托盘和所述码盘的转轴;检测模块,用于检测所述码盘转动的周期数值;控制模块,电连接所述检测模块,用于根据所述检测模块检测到的周期数值来确定所述托盘上的食材重量;弹性件,用于支撑并推动所述托盘复位。
8.在一些实施方式中,所述传动模块包括驱动杆和齿轮,所述驱动杆通过支点连接所述托盘,在所述驱动杆上设有沿其长度方向布置的齿条,所述齿条与所述齿轮的输入端相啮合,所述齿轮用于通过所述转轴带动所述码盘转动。
9.在一些实施方式中,所述传动模块还包括小齿轮,所述小齿轮固定连接在所述转轴上,并且所述小齿轮的输入端与所述齿轮的输出端相啮合。
10.在一些实施方式中,所述传动模块还包括传送带,所述齿轮的主轴与所述转轴通过所述传送带相传动连接。
11.在一些实施方式中,所述码盘沿周向方向间隔设置有至少两个定位部,所述检测模块包括检测单元,所述检测单元设置于所述码盘的外侧,用于检测所述定位部。
12.在一些实施方式中,所述定位部为透光孔或者挡板,所述检测模块还包括具有凹槽的安装座,所述检测单元包括红外发射器和红外接收器,所述红外发射器和所述红外接收器分别安装于所述凹槽的相对两内侧壁,所述码盘的径向外侧可转动地插设于所述凹槽内。
13.在一些实施方式中,所述定位部为挡板,所述检测单元为视觉传感器,所述视觉传感器安装于烹饪设备上,用于检测所述挡板。
14.在一些实施方式中,所述码盘设有一个透光孔,所述检测模块包括至少两组红外收发组件,全部所述红外收发组件沿所述码盘的周向方向均匀间隔布置,所述红外收发组件发射的红外光能够选择性穿过所述透光孔。
15.在一些实施方式中,所述检测模块还包括呈环形的固定座,在所述固定座的内侧壁设有朝内凹陷的环形滑槽,全部所述红外收发组件沿周向方向间隔设置于所述环形滑槽内,所述码盘的径向外侧可转动地插设于所述环形滑槽内。
16.在一些实施方式中,还包括所述弹性件的数量为两个,两个所述弹性件分别位于所托盘的相对两外侧,所述弹性件的一端用于连接烹饪设备,另一端通过支点连接所述托盘。
17.与现有技术相比,本实用新型的至少包括以下有益效果:
18.1、本实用新型的机械式称重装置,通过传动模块联动托盘和码盘的转轴,将检测模块设置于码盘附近并电连接控制模块,使检测模块能够准确可靠地识别码盘转动的周期数值,控制模块能够根据检测到的周期数值来确定食材重量,实现以电控方式建立机械式位移—重量映射关系,确保食材重量准确可靠识别的同时,简化机械式称重设计,降低产品制造成本;
19.2、本实用新型的机械式称重装置,通过增设弹性件,使托盘能够在弹性件作用下进行复位运动,并通过传动模块带动码盘转动,便于下一次进行食物称重,提高产品使用性能。
附图说明
20.图1是本实用新型实施例1中机械式称重装置的内部结构示意图;
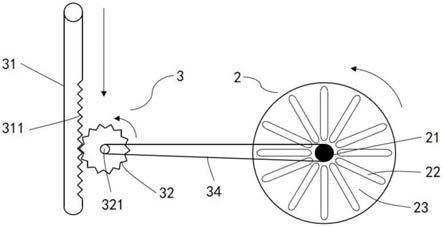
21.图2是本实用新型实施例1中传动模块与检测模块的结构示意图;
22.图3是本实用新型实施例1中传动模块与检测模块的剖视图;
23.图4是本实用新型实施例1中常规码盘脉冲信号图;
24.图5是本实用新型实施例1中非常规码盘脉冲信号图;
25.图6是本发明实施例1中另一种传动模块与检测模块的结构示意图;
26.图7是本实用新型实施例2中传动模块与检测模块的结构示意图;
27.图8是本实用新型实施例3中传动模块与检测模块的剖视图。
具体实施方式
28.以下实施例对本实用新型进行说明,但本实用新型并不受这些实施例所限制。对本实用新型的具体实施方式进行修改或者对部分技术特征进行等同替换,而不脱离本实用新型方案的精神,其均应涵盖在本实用新型请求保护的技术方案范围当中。
29.实施例1
30.如图1
‑
3所示,本实施例提供了一种应用于烹饪设备的机械式称重装置,烹饪设备为烤箱、烤蒸一体机、蒸箱、蒸烤箱、蒸烤一体机、微蒸箱和微蒸烤箱中的任一种,其包括箱体71和内胆72。机械式称重装置包括托盘1、码盘2、传动模块3、检测模块4和控制模块(图中
未示出),其中托盘1可上下运动地设置于内胆72内部,用于盛放食材。码盘2可转动地设置于箱体71与内胆72之间,并且码盘2具有转轴21。传动模块3安装于箱体71与内胆71之间,用于联动托盘1和码盘2的转轴21。检测模块4设置于码盘2附近,用于检测码盘2转动的周期数值。控制模块电连接检测模块4,用于根据检测模块4检测到的周期数值来确定托盘1上的食材重量。
31.可见,本实施例的机械式称重装置,通过传动模块3联动托盘1和码盘2的转轴21,将检测模块4设置于码盘2附近并电连接控制模块,使检测模块4能够准确可靠地识别码盘2转动的周期数值,控制模块能够根据检测到的周期数值来确定托盘1上的食材重量,实现以电控方式建立机械式位移—重量映射关系,确保食材重量的准确可靠识别的同时,简化了机械式称重设计,降低产品制造成本。
32.如图1所示,进一步地,还包括用于支撑并推动托盘1进行复位的弹性件5,该弹性件5设置于箱体71与内胆71之间,其一端连接烹饪设备的箱体71的底部或顶部,另一端通过支架6连接托盘1,这样,通过增设弹性件5,实现可靠支撑托盘1,并且在托盘1上的食物被清空后,托盘1能够在弹性件5的作用下进行复位运动,从而通过传动模块3带动检测模块2的滑块21运动,以便于下一次进行食物称重,提高产品的使用性能。
33.优选地,在内胆72的相对两侧壁分别设有可上下运动的支点6,该支点6可以固定连接托盘1,当然也可以将托盘1直接放置在两个支点6上或者托盘1与支点6可拆卸连接,以方便拆装托盘1,使托盘1的清洁、更换更方便。
34.本实施例的弹性件5为弹簧,其数量为两个,两个弹簧的长度和弹性系数k均相同。两个弹簧分别安装于内胆72的左右两侧壁外侧,并且每个弹簧的下端连接箱体71的底部内侧,上端通过支点6连接托盘1的左侧或右侧。当食物被放置于托盘1上时,托盘1在食物的重力作用下向下运动,使得两个弹簧被压缩,与之同时托盘1能够通过传动模块3联动检测模块2,此时,弹性件5的弹力f=食物重量g=k
×
l,其中l为弹簧的压缩量;当托盘1上的食物被清空后,托盘1受弹簧的弹力f(即预紧力)作用上移,与之同时,托盘1通过传动模块3带动检测模块2朝复位方向运动。
35.在其他实施例中,可以更改弹簧的连接方式,具体地,将弹簧的上端连接箱体71的顶部内侧,下端支点6连接托盘1的左侧或右侧,当食物放置于托盘1上时,托盘1向下运动并拉伸弹簧,而食物重量g=弹性件5的拉力fa=k
×
la,其中la为弹簧的伸长量。反之,当托盘1上的食物被清空后,托盘1会受弹簧的拉力fa作用上移。
36.进一步地,还包括导向模块(图中未示出),导向模块包括沿竖直方向布置的导向槽,在内胆72的左右两侧壁对应支点6的位置处设有导向槽,支点6可沿导向槽上下移动,并且支点6伸入到内胆72的内端连接托盘1,支点6位于内胆72与箱体71之间的外端连接弹性件5和传动模块3。由此,通过导向槽和支点6配合,对托盘1的上下运动起到导向作用,防止托盘1在运动过程中出现移位,避免因托盘1移位造成食物重量检测误差,利于提高食物重量检测的精准性。
37.优选地,为避免高温气流或蒸汽从导向槽进入到箱体71内,导向模块还包括具有开孔的硅胶,该硅胶安装于导向槽处并覆盖导向槽,支点6穿设于开孔,在支点6沿导向槽上下移动时,能够带动开孔上下运动,在运动过程中,由于硅胶本身的特性,基本不会影响到托盘1的上下移动。
38.如图2所示,进一步地,传动模块3包括驱动杆31和齿轮32,驱动杆31安装于内胆72与箱体71之间,并且驱动杆31的上端通过支点6连接托盘1,在驱动杆31上设有沿其长度方向布置的齿条311,齿条311与齿轮32的输入端相啮合,齿轮32用于通过转轴21带动码盘2转动,这样,通过具有齿条311的驱动杆31和齿轮32配合,可实现支点6与码盘2之间的可靠传动,使得转盘1的上下运动能够带动码盘2转动。
39.当托盘1被放置食物下移时,通过驱动杆31和齿轮32作用,使码盘2朝第一方向转动,检测模块4检测该码盘2转动的周期数值,控制模块根据检测到的周期数值,通过算法处理获得食物重量;当托盘1上的食物被清空后,托盘1受弹性件5的弹力作用上移,通过驱动杆31和齿轮32作用,使码盘2朝第二方向转动,以便于下一次进行食物称重。在本实施例中,如果第一方向为顺时针方向,则第二方向为逆时针方向;反之,如果第一方向为逆时针方向,则第二方向为顺时针方向。由此可见,码盘2转动时产生的周期数值与食物重量存在一定映射关系,实现了以电控方式建立机械式位移—重量映射关系,简化设计,降低应用成本,便于控制模块根据码盘2转动的周期数值,准确可靠地确定放置于托盘1上的食材重量。
40.在本实施例中,传动模块3还包括传送带34,齿轮32的主轴321与转轴21通过传送带34相传动连接,这样,通过传送带34,不仅实现了齿轮32与码盘2之间的可靠传动,并且便于将相距较远的齿轮32与码盘2之间的连接,有效消除了因齿轮32与码盘2安装过于紧凑而造成装配空间不足的影响。
41.在其他实施例中,当烹饪设备具有足够大空间装配相邻布置的齿轮32和码盘2时,可以将传送带34替换为小齿轮33。如图6所示,具体地,小齿轮33固定连接在转轴21上,并且小齿轮33的输入端与齿轮32的输出端相啮合,这样,通过相啮合的小齿轮33和齿轮32,不仅实现推动码盘2转动,而且将托盘1产生的小距离位移,放大为码盘2较大转动的周期数值,便于检测模块4精准识别码盘2随托盘1下移而转动产生的周期数值,利于提高食物重量检测的精准性。
42.如图2
‑
3所示,进一步地,码盘2沿周向方向间隔设置有至少两个定位部,检测模块4包括检测单元,该检测单元设置于码盘2的外侧并电连接控制模块,用于检测定位部。
43.优选地,定位部优选为透光孔22,全部透光孔22沿码盘2的周向方向均匀间隔布置,以将码盘2等分为若干份,这样,确保相邻透光孔22之间的间距相等。另外,码盘2位于相邻两个透光孔22之间的部分结构构成挡板23,该挡板23不透光。
44.在本实施例中,检测模块4还包括具有凹槽431的安装座43,凹槽431的开口朝向码盘2。检测单元包括红外发射器41和红外接收器42,红外发射器41和红外接收器42分别安装于凹槽431的相对两内侧壁,码盘2的径向外侧可转动地插设于凹槽431内,并且码盘2位于红外发射器41和红外接收器42之间。由此,当托盘1被放置食物后,托盘1下移并且通过传动模块3推动码盘2转动,红外发射器41发射的红外光可以穿过某一透光孔22或者被某一挡板23遮挡住,从而使得红外接收器42接收到的信号发生变化。
45.在其他实施中,可以省去具有凹槽431的安装座43,改为将红外发射器41和红外接收器42分别固定在内胆72外侧壁和箱体71内侧壁,这样,可以省去安装座43,利于提高内胆72和箱体71的利用率。
46.具体地,控制模块控制红外发射器41为常亮,并检测红外接收器42的状态。在食物称重过程中,当码盘2的透光孔22经过红外发射器41时,由于红外光未被阻挡,使得红外发
射器41发生的红外光能够穿设于透光孔22,根据红外接收器42接收到的信号,控制模块可确定检测到的信号为高电平信号;反之,当透光孔22未经过红外发射器41时,由于红外光被挡板23所遮挡,根据红外接收器42接收到的信号,控制模块可确定检测到的信号为低电平信号。因此,控制模块根据检测模块4检测到的常规码盘脉冲信号如图4所示的方波,由于透光孔22是等间距分布的,故当码盘2沿同一方向(顺时针或逆时针)转动时,其产生方波的占空比也是固定的,故,控制模块检测到固定占空比的方波时,说明托盘2被放置食物开始产生位移,通过检测到固定占空比方波的周期数值,便可得到码盘2转动的周期数值,以便于根据周期数值和重量变化量δm计算出食物重量。
47.本实施例以检测到一个周期数值所对应的重量变化量为50g,此对应关系可以通过调节齿轮32的主轴321直径与码盘2的转轴21直径的比例来改变。
48.在食物称重过程,当托盘1下移的过程即将结束时,由于弹簧的作用力越来越大阻止托盘1继续下移甚至使托盘1有所上升,即出现上下震荡的情况,此时mcu检测到码盘产生的方波占空比也出现不规律情况,即如图5所示的非常规码盘方波信号,经历了末端震荡后,托盘1静止,码盘2也随之静止,检测到的信号停留在高电平(透光孔22对应红外发射器41位置)或低电平(挡板23对应红外发射器41位置),此时位移检测过程结束,有效周期数值截止到占空比出现不规律情况之前,食物重量g=50g
×
有效周期数值。
49.当将托盘1中的食物清空后,托盘1受弹性件5的弹力作用上移,通过驱动杆31、齿轮32和传送带34的作用,推动码盘2朝与称重过程转动方向相反的方向转动,在托盘1上移至复位位置时静止,码盘2也随之静止,可以进行下一次食物称重测量。
50.实施例2
51.如图7所示,本实施例与实施例1的不同点在于,码盘2的具体结构有所不同。具体地,在码盘2的外缘沿周向方向均匀间隔设置有至少两个定位部,该定位部优选为挡板23,相邻挡板23之间形成有间隙。当检测单元包括红外发射器41和红外接收器42时,红外发射器41和红外接收器42可以安装在如实施例1所述的安装座43上,也可以将红外发射器41直接安装在内胆72外侧壁,而红外接收器42直接安装在箱体71内侧壁,此时食物重量检测方式与实施例1相同。
52.当检测单元优选为视觉传感器,视觉传感器可以直接安装在内胆72外侧壁或者箱体71内侧壁上并位于码盘2的外侧,并且确保视觉传感器能够检测到挡板23。当然,也可以通过安装座43(该固定座43可以省去凹槽431)安装在内胆72外侧壁或者箱体71内侧壁上。
53.可见,通过将全部定位部沿周向方向均匀间隔设置在码盘2的外缘,可避免在码盘2上开孔,利于提高码盘2的强度和使用寿命。
54.实施例3
55.如图8所示,本实施例与实施例1的不同点在于,码盘2和检测模块4的结构不同。具体地,在码盘2上设有一个透光孔22。检测模块4包括呈环形的固定座45和至少两组红外收发组件,在固定座45的内侧壁设有朝内凹陷的环形滑槽451,全部红外收发组件沿周向方向均匀间隔设置于环形滑槽451内,以确保相邻红外收发组件之间的距离相等。码盘2的径向外侧可转动地插设于环形滑槽451内,红外收发组件发射的红外光能够选择性穿过透光孔22。当码盘2的透光孔22转动至某一组红外收发组件时,该组红外收发组件的信号会发生变化,此时控制模块可以根据某一组红外收发组件的信号变化情况,确定透光孔22所在位置,
进而便于控制模块根据全部红外收发组件的信号变化情况,准确可靠地识别出透光孔22的转动周期数,使控制模块能够根据转动周期数和重量变化量δm,计算出食物重量。
56.红外收发组件包括分别电连接控制模块的红外发射器41和红外接收器42,红外发射器41和红外接收器42分别设置于环形滑槽451的相对两侧壁内侧,码盘2位于红外发射器41与红外接收器42之间,并且码盘2分别与红外发射器41和红外接收器42间隙配合,这样,确保码盘2能够在环形滑槽451内部顺畅转动时。
57.可见,本实施例通过多组红外收发组件与具有透光孔22的码盘2配合,实现了以电控方式建立机械式位移—重量映射关系,确保食材重量的准确可靠识别的同时,简化了机械式称重设计,降低产品制造成本。
58.以上所述的仅是本实用新型的一些实施方式。对于本领域的普通技术人员来说,在不脱离本实用新型创造构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1