一种组合惯导装置的制作方法
1.本实用新型涉及惯性导航技术领域,尤其涉及一种组合惯导装置。
背景技术:
2.惯导指的是惯性导航,能够不依赖于任何外部信息、也不向外部辐射能量的自主式导航系统,隐蔽性好,可用于导弹、智能弹药、无人机、无人航空器、车辆、水中兵器和各种稳定平台的制导、导航与姿态测量。惯性导航系统尤其是在微型飞行器、微型机器人等微小型设备的领域内有着大量的应用,这也促使惯性导航系统向着微型化、低功耗的方向发展。但是由于微型飞行器等需要不断的运动,在运动的过程中惯导装置会产生振动,在不断的振动过程中可能会出现零件脱落的问题,难以满足微型飞行器等对惯导装置结构的紧固性要求。
技术实现要素:
3.基于此,有必要针对上述技术问题,提供一种组合惯导装置。
4.一种组合惯导装置,包括:底座、惯性测量板、导航计算板、gnss模块、信号处理模块、输入输出接口、外罩和电源;所述底座内部四角处设置有台阶面,所述底座构造有前壁,所述前壁上设置有d形孔和两个操场形孔,所述d形孔内安装有sma穿壁式母头,所述sma穿壁式母头连接有sma射频头,所述sma射频头连接有外部卫星接收天线,用于接收卫星射频信号;所述惯性测量板通过四组竖直设置的间隔柱安装在所述台阶面上,所述惯性测量板上设置有惯性测量单元;所述导航计算板与所述惯性测量板连接,固定在所述间隔柱上,所述导航计算板上搭载有导航计算机,所述导航计算机用于对所述惯性测量单元采集到的数据进行解算;所述gnss模块与所述导航计算机电连接,用于检测载体运动的速度信息;所述信号处理模块用于对接收到的射频信号进行处理;所述输入输出接口设置在所述操场形孔内,用于数据的输入和输出;所述外罩与所述底座匹配;所述电源用于提供电量。
5.进一步地,所述惯性测量板的侧边焊接有传感器板,所述传感器板上安装有辅助传感器。
6.进一步地,所述惯性测量板中部通过螺钉与所述底座连接固定。
7.进一步地,所述惯性测量单元包括微机械陀螺和加速度计;所述微机械陀螺用于检测载体运动的角速度信息;所述加速度计用于检测载体运动的加速度信息。
8.进一步地,所述输入输出接口包括固定式输入插座和固定式输出插座,所述固定式输入插座和固定式输出插座分别安装在两个所述操场形孔内;所述固定式输入插座通过导线连接到所述惯性测量板上,对所述惯性测量单元和辅助传感器进行供电和数据交互;所述固定式输出插座用于数据输出。
9.进一步地,所述固定式输出插座外部套设有密封帽,所述密封帽内部通过密封帽堵头进行密封。
10.进一步地,还包括:排针和排母;所述导航计算板通过所述排针和排母与所述惯性
测量板连接,实现所述导航计算板和所述惯性测量板之间的供电连接和数据交互。
11.进一步地,所述导航计算机内设置有数字信号处理器和现场可编程逻辑门阵列。
12.进一步地,还包括:数据存储模块,所述数据存储模块用于存储数据。
13.进一步地,所述电源连接有电源转化模块,所述电源转化模块用于对电源进行转化。
14.与现有技术相比,本实用新型的优点及有益效果在于:
15.1、本实用新型提高了惯导装置的结构紧固性,避免在运动过程中出现零件脱落的问题。
16.2、本实用新型能够通过sma射频头连接外部卫星接收天线,从而接收卫星射频信号。
17.3、本实用新型在固定式输出插座外部设置有密封帽和密封帽堵头,防止产品在使用过程中错插。
附图说明
18.图1为一个实施例中一种组合惯导装置的结构示意图;
19.图2为图1的剖视示意图;
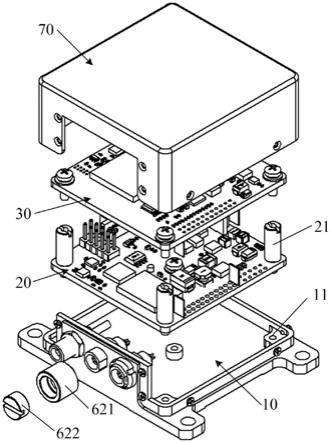
20.图3为图1的爆炸图;
21.图4为图1中底座的结构示意图;
22.图5为图4的正视示意图;
23.图6为一个实施例中一种组合惯导装置的原理示意图。
24.附图中,包括:组合惯导装置100、上位机200、底座10、台阶面11、前壁12、d形孔121、操场形孔122、穿壁式母头123、惯性测量板20、间隔柱21、惯性测量单元22、微机械陀螺221、加速度计222、传感器板23、辅助传感器231、导航计算板30、导航计算机31、gnss模块40、信号处理模块50、输入输出接口60、固定式输入插座61、固定式输出插座62、密封帽621、密封帽堵头622、外罩70、数据存储模块80和电源转化模块90。
具体实施方式
25.为了使本实用新型更加清楚明白,下面通过具体实施方式结合附图对本实用新型做进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
26.结合图1至图6所示,提供了一种组合惯导装置100,包括:底座10、惯性测量板20、导航计算板30、gnss模块40、信号处理模块50、输入输出接口60、外罩70和电源;底座10四角处设置有台阶面11,底座10构造有前壁12,前壁12上设置有d形孔121和两个操场形孔122,d形孔121内安装有sma穿壁式母头123,所述sma穿壁式母头123连接有sma射频头,sma射频头连接有外部卫星接收天线,用于接收卫星射频信号;惯性测量板20通过四组竖直设置的间隔柱21安装在台阶面11上,惯性测量板20上设置有惯性测量单元22;导航计算板30与惯性测量板20连接,固定在间隔柱21上,导航计算板30上搭载有导航计算机31,导航计算机31用于对惯性测量单元22采集到的数据进行解算;gnss模块40与导航计算机31电连接,用于检测载体运动的速度信息;信号处理模块50用于对接收到的射频信号进行处理;输入输出接
口60设置在两个操场形孔122内,用于数据的输入和输出;外罩70与底座10匹配;电源用于提供电量。
27.在本实施例中,底座10构造有前壁12上设置d型孔121和两个操场形孔122,d型孔121用于安装sma穿壁式母头123,连接sma射频头,接收卫星射频信号,两个操场形孔122内安装有输入输出接口60,用于数据的输入和输出,底座10内部还设置有台阶面11,惯性测量板20通过四组竖直设置的间隔柱21安装在台阶面11内,惯性测量板20上设置有惯性测量单元22,用于车辆载体的加速度和角速度;导航计算板30与惯性测量板20连接,固定在间隔柱21上,并搭载有导航计算机31,用于解算惯性测量单元22获取的数据信息,信号处理模块50用于对接收到的射频信号进行处理;外罩70与底座10匹配,罩设在底座10的上方,电源用于提供电量,通过置d型孔121和操场形孔122的设置,能够让sma穿壁式母头123和输入输出接口60更加紧固的安装在前壁12上,在运动过程中也不会因为震动而产生脱落的问题,从而确保管道装置的紧固性。
28.具体地,d形孔121和两个操场形孔122区别于现有圆形孔,从而能够防止插座或母头在孔内自由转动,连接更为紧固。
29.具体地,gnss(global navigation satellite system,全球导航卫星系统)模块可以采用gps系统、北斗卫星定位系统、格洛纳斯系统或伽利略导航系统中的任意一种。
30.具体地,sma(subminiature versiona,超小型版本a)穿壁式母头123为小型穿壁式母头。
31.其中,惯性测量板20的侧边焊接有传感器板23,传感器板23上安装有辅助传感器231。
32.具体地,传感器板23可以以挂接的方式与惯性测量板20焊接为一体,满足惯性测量单元22不同轴向的传感器放置;传感器板23上可以根据实际需要安装对应的辅助传感器,例如高度计等。
33.其中,惯性测量板20中部通过螺钉与底座20连接固定。
34.具体地,惯性测量板20中部通过螺钉与底座20进行进一步固定,避免在运动过程中惯性测量板20产生振动,导致测量结果产生误差。
35.其中,惯性测量单元22包括微机械陀螺221和加速度计222;微机械陀螺221用于检测载体运动的角速度信息;加速度计222用于检测载体运动的加速度信息。
36.具体地,惯性测量单元22选用小型惯性测量单元,减少体积,能够实现电气输入保护、电源转换及传感器采集的功能。微机械陀螺221和加速度计222采集获取载体的角速度信息和加速度信息传输至导航计算机31,导航计算机31根据载体的角速度信息和加速度信息得到载体的俯仰角、姿态角、方向角、速度位置,同时运动卡尔曼滤波技术进行导航信息、高度信息等相关信息融合处理,得到载体的俯仰角、滚动角、航向角、速度和位置的最优估计。
37.其中,输入输出接口60包括有固定式输入插座61和固定式输出插座62,固定式输入插座61和固定式输出插座62分别安装在两个操场形孔122内;固定式输入插座61通过导线连接到惯性测量板20上,对惯性测量单元22和辅助传感器231进行供电和数据交互;固定式输出插座62用于数据输出。
38.具体地,固定式输入插座61可以采用型号为eeg.00.304.cll的固定式插座,从而
实现对惯性测量单元22和辅助传感器231的供电和数据交互;固定式输出插座62可以采用型号为eeg.00.305.cll的固定式插座,从而实现数据输出。
39.其中,固定式输出插座62外部套设有密封帽621,密封帽621内部通过密封帽堵头622进行密封。
40.具体地,固定式输出插座62外部套设有密封帽621,且密封帽621内部采用密封帽堵头进行密封,防止错插。
41.其中,还包括:排针和排母,导航计算板30通过排针和排母与惯性测量板20连接,实现导航计算板30和惯性测量板20之间的供电连接和数据交互。
42.具体地,排针和排母可以采用间隔为2.0的排针和排母,即间距为2毫米的排针和排母,从而控制导航计算板30和惯性测量板20之间的间距,实现导航计算板30和惯性测量板20的供电连接和数据交互。
43.其中,导航计算机31内设置有数字信号处理器和现场可编程逻辑门阵列。
44.具体地,导航计算机为基于dsp(digital signal processing,数字信号处理器)芯片和fpga(field programmable gatearray,现场可编程逻辑门阵列)的高性能导航计算机,从而提高计算速度。导航计算机31主要将惯性测量单元22采集的数据进行解算,并按照产品通信协议格式将数据进行打包。
45.其中,还包括:数据存储模块80,数据存储模块80用于存储数据。
46.具体地,导航计算机31得到计算结果之后能够将获取的计算结果存储在数据存储模块80内。
47.其中,电源连接有电源转化模块90,电源转化模块90用于对电源进行转化。
48.具体地,通过电源转化模块90能够将电源转化为各个模块需要的电源,从而实现各个模块的供电。
49.其中,以上内容是结合具体的实施方式对本实用新型所做的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1