一种全天时自动报靶系统的制作方法
1.本实用新型涉及光电测量技术领域,是一种全天时自动报靶系统。
背景技术:
2.对地突击训练是作战人员军事作战能力的重要手段。以对地突击训练为例,机载平台挂载弹药,按照训练计划进行飞行训练,依据军事学习理论及作战策略,作战人员在适当的空中位置,对准地面靶标投掷弹药,弹药在空中快速飞行,最后在地球引力的作用下落至靶场地面上。此时,采用各种技术手段获取弹药落点位置、进行报靶,成为评估训练中作战方法、作战策略的有效途径。通过报靶,为对地突击训练提供量化指标,可帮助作战人员及时进行相应调整,以优化训练效果,节省训练成本。
3.基于成像观测系统获取空中投掷目标落点空间位置,最直观、最直接的传统实现方法是,首先采用图像算法在目标落地后的观测图像中,检测目标落点像素位置;然后基于多个测站目标落点像素位置,采用侧向交会等数学模型,推导目标落点的三维空间位置。然而,对于机载弹药对地对地突击等军事训练应用而言,弹药目标落地后发生爆炸,这将导致基于上述传统方法无法在测站图像中较精确地定位目标落地像素位置,以此估算出的目标落点三维空间位置会存在很大误差。
技术实现要素:
4.本实用新型为了估算出的目标落点三维空间位置,本实用新型提供了一种全天时自动报靶系统,本实用新型提供了以下技术方案:
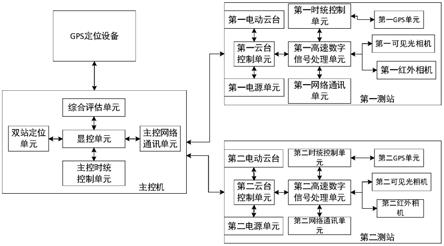
5.一种全天时自动报靶系统,所述系统包括:gps定位设备、主控机和第一测站;
6.所述主控机连接gps定位设备,所述主控机包括综合评估单元、双站定位单元、显控单元、主控网络通讯单元和主控时统控制单元,综合评估单元与显控单元进行交互,所述主控时统控制单元与显控单元进行交互,所述双站定位单元与显控单元进行交互,所述主控网络通讯单元与显控单元进行交互;
7.所述第一测站包括第一电动云台、第一时统控制单元、第一gps单元、第一云台控制单元、第一高速数字信号处理单元、第一可见光相机、第一红外相机、第一电源单元和第一网络通讯单元,所述主控网络通讯单元与第一云台控制单元进行交互,所述第一云台控制单元分别连接第一电动云台、第一高速数字信号处理单元和第一电源单元,所述第一高速数字信号处理单元分别连接第一时统控制单元和第一网络通讯单元,所述第一时统控制单元连接第一gps单元,所述第一高速数字信号处理单元连接第一可见光相机和第一红外相机。
8.优选地,所述系统还包括第二测站,所述第二测站包括第二电动云台、第二时统控制单元、第二gps单元、第二云台控制单元、第二高速数字信号处理单元、第二可见光相机、第二红外相机、第二电源单元和第二网络通讯单元,所述主控网络通讯单元与第二云台控制单元进行交互,所述第二云台控制单元分别连接第二电动云台、第二高速数字信号处理
单元和第二电源单元,所述第二高速数字信号处理单元分别连接第二时统控制单元和第二网络通讯单元,所述第二时统控制单元连接第二gps单元,所述第二高速数字信号处理单元连接第二可见光相机和第二红外相机。
9.本实用新型具有以下有益效果:
10.本实用新型的2个或多个测站安装在靶区铁塔或载车上,以不同视角对靶区实施监测,云台控制单元可以控制电动云台完成不同靶标间的快速精确调转。训练时,通过可见光相机和红外相机实时采集靶区图像信息,高速数字信号处理单元对红外图像进行处理,获取图像平面上目标二维空中运动轨迹,并将轨迹坐标通过网络通讯单元发送到主控机。时统控制单元和gps单元实现各个测站的时间同步。
11.主控机安装在指挥场所,通过网络通讯单元对各个测站实现远程控制和数据传输。训练前,通过高精度gps定位设备采集各个测站和靶标的gps坐标信息,结合相机自身标定参数建立双站定位模型。训练时,主控机接收到各个测站发送的轨迹坐标后,双站定位单元对各测站目标二维轨迹进行时空配准、交叉定位,生成弹药空中三维运动轨迹,结合靶标gps信息,预测目标落点位置,并生成报靶信息。综合评估单元对所有报靶信息进行分析评估,具有数据记录、数据管理、图表显示和打印等多种功能。
附图说明
12.图1为一种全天时自动报靶系统示意图。
具体实施方式
13.以下结合具体实施例,对本实用新型进行了详细说明。
14.具体实施例一:
15.根据图1所示,本实用新型提供一种全天时自动报靶系统,一种全天时自动报靶系统,所述系统包括:gps定位设备、主控机和第一测站;
16.所述主控机连接gps定位设备,所述主控机包括综合评估单元、双站定位单元、显控单元、主控网络通讯单元和主控时统控制单元,综合评估单元与显控单元进行交互,所述主控时统控制单元与显控单元进行交互,所述双站定位单元与显控单元进行交互,所述主控网络通讯单元与显控单元进行交互;
17.所述第一测站包括第一电动云台、第一时统控制单元、第一gps单元、第一云台控制单元、第一高速数字信号处理单元、第一可见光相机、第一红外相机、第一电源单元和第一网络通讯单元,所述主控网络通讯单元与第一云台控制单元进行交互,所述第一云台控制单元分别连接第一电动云台、第一高速数字信号处理单元和第一电源单元,所述第一高速数字信号处理单元分别连接第一时统控制单元和第一网络通讯单元,所述第一时统控制单元连接第一gps单元,所述第一高速数字信号处理单元连接第一可见光相机和第一红外相机。
18.所述系统还包括第二测站,所述第二测站包括第二电动云台、第二时统控制单元、第二gps单元、第二云台控制单元、第二高速数字信号处理单元、第二可见光相机、第二红外相机、第二电源单元和第二网络通讯单元,所述主控网络通讯单元与第二云台控制单元进行交互,所述第二云台控制单元分别连接第二电动云台、第二高速数字信号处理单元和第
二电源单元,所述第二高速数字信号处理单元分别连接第二时统控制单元和第二网络通讯单元,所述第二时统控制单元连接第二gps单元,所述第二高速数字信号处理单元连接第二可见光相机和第二红外相机。
19.系统以红外相机无源交叉定位为基础建立无源交叉定位模型,实现弹药落点定位、报靶功能。系统包括主控机、测站以及高精度gps定位设备。
20.其中主控机中所述显控单元用于实时数据的采集显示和设备控制;所述主控时统控制单元用于对测站实施同步控制;所述双站定位单元用于接收测站的目标信息,生成目标三维空中运动轨迹和弹着点坐标;所述综合评估单元可对训练数据进行分析、记录和评估;所述主控网络通讯单元实现与远程各个测站的网络通信。
21.测站中所述电源单元为所有设备提供稳定供电;所述云台控制单元实现对电动云台的实时控制;所述时统控制单元接收主控机的同步命令,同时接收gps单元的时间信息,实现各个测站设备的同步功能;所述高速数字处理单元接收可见光相机和红外相机的实时数据,对红外图像进行预处理、目标检测、轨迹关联,获取测站图像平面上目标二维空中运动轨迹;所述网络通讯单元实现与主控机的网络通信。
22.所述高精度gps定位设备用于采集靶场靶标、各测站、指北参考点(仅限人为布设参考点)的gps信息。
23.以上所述仅是一种全天时自动报靶系统的优选实施方式,一种全天时自动报靶系统的保护范围并不仅局限于上述实施例,凡属于该思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本领域的技术人员来说,在不脱离本实用新型原理前提下的若干改进和变化,这些改进和变化也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1