反向全局定位的结构光相机的制作方法
1.本实用新型属于三维扫描仪技术领域,尤其涉及一种反向全局定位的结构光相机。
背景技术:
2.双目结构光相机解决了3d视觉传感器在工业应用中的诸多技术难题,包括高环境光干扰,金属反光,反射率影响,运动模糊,多机干扰等等,用户通过一次拍照即可实现对静止目标物的多个特征同时进行三维质量检测,同时双目结构光相机还具有测量精度高,可实现快速在线检测,整体结构小巧便携等特点。
3.但是,目前的双目结构光相机虽然解决了测量精度的问题,但是针对大场景的扫描视野和测量范围还是无法实现双目结构光相机在更大的全局范围内的统一测量。
技术实现要素:
4.本实用新型解决的技术问题是提供一种反向全局定位的结构光相机,将双目结构光相机和大视野相机复合在一起,可实现大场景的扫描视野和测量范围,使得双目结构光相机可以在更大的全局范围内进行统一测量。
5.为解决上述技术问题,本实用新型所提供的技术方案为:
6.一种反向全局定位的结构光相机,包括双目结构光相机组件和至少一个大视野相机组件,所述大视野相机组件固定安装在所述双目结构光相机组件的上部和/或侧部,所述大视野相机组件与双目结构光相机组件之间通过有线或无线进行通信连接。
7.作为本实施例的优选,所述双目结构光相机组件与所述大视野相机组件之间为可拆式连接。
8.作为本实施例的优选,所述双目结构光相机组件包括第一壳体,在所述第一壳体的前壳体上设有光机扫描口和双目相机扫描口;在所述第一壳体内安装有光机和双目相机;所述光机和双目相机分别与第一壳体内部的电路控制板电性连接。
9.作为本实施例的优选,所述大视野相机组件包括第二壳体,在所述第二壳体上开设大视野相机扫描口;在所述第二壳体内设有与大视野相机扫描口相匹配的大视野相机,所述大视野相机通过连接骨架安装到双目结构光相机组件上。
10.作为本实施例的优选,所述大视野相机包括相机灯座,在所述相机灯座内设置有补光灯,所述补光灯由若干个均匀环绕的led灯珠组成。
11.作为本实施例的优选,在所述第一壳体的顶部设置有与之相匹配的密封板,在所述密封板上设置有用于对大视野相机组件进行安装定位的定位柱。
12.与相关技术相比较,本实用新型提供的反向全局定位的结构光相机具有如下有益效果:
13.(1)本实用新型所述的反向全局定位的结构光相机,将将双目结构光相机和大视野相机复合连接在一起,既可以支持独立大场景模式和独立扫描模式,还可以实现大场景
和扫描联合模式,将目标定位功能和扫描功能完美对接,实现了独立大场景模式输出的定位标志点,可实现大场景的扫描视野和测量范围,使得双目结构光相机可以在更大的全局范围内进行统一测量。
14.(2)本实用新型所述的反向全局定位的结构光相机,将大视野相机和双目结构光相机刚性连接在一起,通过大视野相机对准较大范围内的定位标志点,通过大视野相机和双目结构光相机的固定连接,可以得到双目结构光相机在控制点坐标系中的位置,从而实现了双目结构光相机在更大的全局范围内的统一测量。
附图说明
15.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
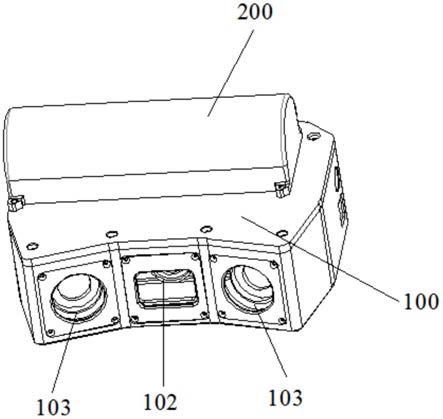
16.图1为本实用新型反向全局定位的结构光相机的结构示意图;
17.图2为图1的爆炸结构示意图;
18.图3为反向全局定位的结构光相机另一实施例的结构示意图;
19.图4为本实用新型标大视野相机的结构示意图。
20.图中标号:100、双目结构光相机组件;101、第一壳体;102光机扫描口;103、双目相机扫描口;104、光机;105、双目相机;106、电路控制板;200、大视野相机组件;201、第二壳体;202、大视野相机扫描口;203、大视野相机;2031、相机灯座;2032、补光灯;2033、led灯珠;204、连接骨架;300、密封板;301、定位柱。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.参阅图1至4所示,本实用新型实施例提供一种反向全局定位的结构光相机,具体包括双目结构光相机组件100和至少一个大视野相机组件200,大视野相机组件200固定安装在双目结构光相机组件100的上部和/或侧部,大视野相机组件200与双目结构光相机组件100之间通过有线或无线进行通信连接。在本实施例中,双目结构光相机组件100可以单独实现近距离的扫描定位功能,大视野相机组件200与双目结构光相机组件100配合可以实现大视野的定位扫描功能。进一步的再笨实施例中,大视野相机组件200设置在双目结构光相机组件100的顶部,大视野相机组件200可以为一个或多个具体可以根据扫描视野的范围来确定。
23.在本实施例中,双目结构光相机组件100与大视野相机组件200之间为可拆式连接,这样当双目结构光相机组件100或大视野相机组件200发生损坏是方便进行更换。在第一壳体101的顶部设置有与之相匹配的密封板300,在所述密封板300上设置有用于对大视野相机组件200行安装定位的定位柱301。通过定位柱301可实现双目结构光相机组件100与
大视野相机组件200的之间的精确定位。
24.参阅图1至4所示,双目结构光相机组件100包括第一壳体101,在第一壳体101的前壳体上设有光机扫描口102和双目相机扫描口103,所述第一壳壳体101内安装有光机104和双目相机105,通过光机扫描口102和双目相机扫描口103可以与光机104和双目相机105进行匹配。光机104和双目相机105分别与第一壳体101内部的电路控制板106电性连接。当双目相机105处于独立扫描工作模式时,双目相机105和光机104打开,双目相机104实时同步拍摄目标图像,并通过图像处理算法和激光线匹配算法,实时生成目标表面三维点云。
25.参阅图1至4所示,大视野相机组件200包括第二壳体201,在第二壳体201上开设大视野相机扫描口202;在第二壳体202内设有与大视野相机扫描口202相匹配的大视野相机203,所述大视野相机203通过连接骨架204安装到双目结构光相机组件100上。在本实施例中,当反向全局定位的结构光相机处于大场景和扫描联合模式时,大视野相机203和双目相机105都打开,首先大视野相机203捕获场景中的发光标志点(图中未标识),然后反光标志点作为定位标志点,基于大视野相机203和双目相机105的位置关系(大视野相机203和双目相机105位置刚性固定),能够将扫描得到的目标点云实时定位和拼接。在本实施例中,将大视野相机203和双目相机105复合在一起,既支持独立大场景模式和独立扫描模式,还可以实现大场景和扫描联合模式,将目标定位功能和扫描功能完美对接,可实现大场景的扫描视野和测量范围,使得双目结构光相机可以在更大的全局范围内进行统一测量。
26.参阅图1至4所示,大视野相机203包括相机灯座2031,在相机灯座2031内设置有补光灯2032,补光灯2032由若干个均匀环绕的led灯珠2033组成。通过均匀环绕的led灯珠2033可以更清楚的拍照捕获大场景中稳定参考体(比如墙壁、钢结构手脚架、室内支撑柱等不易变形的大场景)上的反光标志点。当反向全局定位的结构光相机处于大场景与扫描协同工作模式下,大视野相机203始终朝向稳定参考体,并且保证在大视野相机203视野范围内始终有不少于三个发光标志点,由三个或者三个以上的定位标志点(即反光标志点)可以计算出反向全局定位的结构光相机系统的位置和姿态。三维扫描仪系统中的双目相机可以实时扫描得到目标表面的三维点云相对于双目相机的三维坐标,加上大视野相机203获取的三维扫描仪系统在全局坐标系下的位姿,以及大视野相机203和双目相机105的位置关系,这样可以得到目标表面点云在全局坐标系下的三维坐标。具体的较远距离的大视野相机203(比如2000mm)和较近距离的双目相机105(比如200mm)刚性的连接在一起,将大视野相机203对准较大范围内的定位标志点,解算大视野相机203在控制点坐标系中的位置,通过刚性连接关系得到双目相机105在定位标志点坐标系中的位置,从而实现了双目结构光相机在更大的全局范围内的统一测量。
27.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1