一种便携式镜面/类镜面形貌测量装置
1.本实用新型涉及一种镜面/类镜面形貌测量装置,属光学检测技术领域。
背景技术:
2.自由曲面光学元件因其能够更为显著地校正系统像差、提升系统设计性能,实现光学系统的紧凑化和高透过率,因而,在诸如激光核聚变系统、微光夜视仪、光刻机、成像光谱仪等光电系统的研发和实现过程中引起了浓烈的兴趣。然而,由于存在面形描述自由性大、梯度变化复杂等特点与问题,其表面形貌轮廓的高精度成型难度却远大于传统光学元件。加工与检测作为光学元件制造过程中重要而密不可分的两部分,检测精度的高低往往直接决定了加工成型效果的优劣。
3.随着科学技术的不断发展,先后出现了粒子流加工技术、现代数控和可控柔体研抛技术等高精度的非球面/自由曲面加工方案,与之相适应的检测手段却发展缓慢。在光学元件的加工过程中,传统而直接的检测手段为接触/非接触式的三坐标机。然而其点扫的工作方式,使得整个测试过程较长,检测效能不高,且精度有限(亚微米量级)。虽然基于补偿器(如计算制全息图元件)的非球面干涉术可达到纳米量级的检测精度,但针对不同面形的被测件需要设计和制备相应的波面补偿元件,存在检测通用性弱的问题。系统构成较为简单的相位恢复(phase retrieval)法作为一种非干涉检测技术已被成功应用于光学非球面镜的在位检测。然而其迭代复原过程中所需的若干离焦面光场的获取却有赖于精密平移导轨设备,被测件较大的非球面度则进一步加剧了其对探测器高空间分辨率的要求。
4.得益于计算几何、数字图像显示与处理等技术的进步,另一种自由曲面面形检测技术——相位偏折术(phase measuring deflectometry,pmd)呈现迅猛发展的态势,其测量精度甚至可与干涉术相媲美。pmd是一种以正/余弦条纹信号为媒介,由相位变化调制与解调被测物表面法向量,通过梯度积分或立体视觉复原物面形貌的测量技术。针对镜面物体,pmd在保持了与干涉术相近的测量分辨率水平的基础上,简化了系统构成、大大拓展了系统动态测量范围(可达数十毫米)。然而现有pmd测量装置的便携性还不足,调整与检测的自动化程度还不够高;在测量过程中,通常需要依次显示两组水平和垂直方向上的各向异性正弦直条纹图,检测效率有待提升。因此,基于pmd原理提出一种结构紧凑、便携性强、自动化程度与检测效率高的镜面/类镜面形貌测量装置与方法,是该领域的研究热点与趋势。
技术实现要素:
5.本实用新型针对现有技术存在的不足,提供一种使用/携带方便、自动化程度较高的镜面/类镜面形貌测量装置。
6.为实现上述目的,本实用新型采用的技术解决方案是提供一种便携式镜面/类镜面形貌测量装置,它包括显示模块、图像采集模块、可伸缩框架、载物台、接口控制器和计算机;
7.所述接口控制器通过wi-fi模块与计算机无线连接;
8.所述的可伸缩框架,包括上、中、下三组平行导轨、伸缩杆和用于调节伸缩杆的伸缩调节机构,所述导轨与伸缩杆垂直,各导轨的两端分别与伸缩杆固定,伸缩调节机构通过数据传输控制线与接口控制器连接;
9.所述显示模块包括显示屏和第一直线电机,所述第一直线电机与显示屏固定,第一直线电机分别置于可伸缩框架的中、下两组平行导轨上,显示屏朝向载物台,显示屏、第一直线电机通过数据传输控制线分别与接口控制器连接;
10.所述图像采集模块包括具有自动调焦功能的相机、用于确定被测物到相机之间距离的传感器和第二直线电机;所述第二直线电机与相机的底座固定,传感器置于相机的底座上;第二直线电机分别置于可伸缩框架的中、上两组平行导轨上;载物台位于相机的前焦平面,显示屏、载物台、相机呈三角结构放置,载物台上的被测物及其反射的显示屏镜像位于相机的景深范围内;传感器、第二直线电机通过数据传输控制线分别与接口控制器连接;
11.所述显示屏显示通过接口控制器接收的计算机输出的用于测量的条纹图,相机采集经被测物表面调制反射的变形条纹图,通过接口控制器输入计算机。
12.本实用新型所述传感器为激光位移传感器、超声波距离传感器、红外距离传感器中的一种。
13.本实用新型提供的一种便携式镜面/类镜面形貌测量装置,计算机通过接口控制器控制直线电机、伸缩调节机构的运动,自动调整显示模块、图像采集模块的位置和角度。
14.与现有技术相比,本实用新型的显著优点在于:提供的测量装置结构紧凑、便携性强、自动化程度与检测效率高,适合于镜面/类镜面元件面形的自动化、无线测控。
附图说明
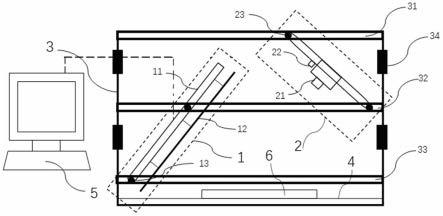
15.图1是本实用新型实施例提供的一种便携式镜面/类镜面形貌测量装置结构示意图。
16.其中:1、显示模块;2、图像采集模块;3、可伸缩框架;4、载物台;5、计算机;6、被测物;11、接口控制器;12、显示屏;13、第一直线电机;21、相机;22、距离传感器;23、第二直线电机;31、上平行导轨;32、中平行导轨;33、下平行导轨;34、伸缩杆控制电机。
具体实施方式
17.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。
18.实施例1
19.参见附图1,它是本实施例提供的一种便携式镜面/类镜面形貌测量装置的结构示意图;测量装置包括:显示模块1、图像采集模块2、可伸缩框架3、载物台4、计算机5和被测物6;显示模块1中设置接口控制器11、一个显示屏12和四个第一直线电机13;图像采集模块2中包括具有自动调焦功能的相机21、一个距离传感器22和四个第二直线电机23;可伸缩框架3包括上平行导轨31、中平行导轨32、下平行导轨33三组平行导轨和八个伸缩电机34,导轨与伸缩杆垂直,各导轨的两端分别与伸缩杆固定。相机、距离传感器,直线电机、伸缩电机通过数据传输控制线分别与接口控制器连接。接口控制器11通过wi-fi模块与计算机5无线连接;
20.显示模块1通过第一直线电机13置于可伸缩框架3的中平行导轨32、平行导轨下33
两组平行导轨上,且显示模块1的显示屏12朝向载物台4。显示屏通过数据传输控制线与接口控制器连接。
21.图像采集模块2通过第二直线电机23置于可伸缩框架3的中平行导轨32、上平行导轨21两组平行导轨上,且图像采集模块2的相机21朝向载物台4;显示模块1与图像采集模块2通过第一直线电机13、第二直线电机23和伸缩电机34调整其位置和角度,实现自动化调整。
22.所述载物台4位于相机的前焦平面,显示屏12、载物台4、相机21呈三角结构放置,使得相机21能够清晰观测到载物台4上的被测物6及其反射的显示屏12的镜像;接口控制器11与计算机5之间通过wi-fi无线连接,在保证测量结果准确的同时兼顾了便携性与灵活性;显示屏12上显示的由计算机输入的基于时域变频相移的同心圆环正弦条纹经被测物6表面调制反射,得到变形条纹图并由相机21采集获取;相机21将采集的图片经接口控制器11传输至计算机5,经过数据处理后,得到被测物6的三维形貌。
23.距离传感器22为激光位移传感器、超声波距离传感器、红外距离传感器中的一种,用于确定被测物6到相机21之间的距离。
24.本实施例提供的测量装置通过wi-fi与计算机5无线连接,完成远程控制。
25.采用本实施例提供便携式镜面/类镜面形貌测量装置,其测量方法包括以下步骤:
26.步骤一,测量装置的装调。
27.测量装置的结构参见附图1,将载物台4和被测物6置于可伸缩框架3底面,将显示模块1与图像采集模块2通过数据传输控制线连接,并将两者分别初步安装至可伸缩框架3的中平行导轨32、平行导轨下33和中平行导轨32、上平行导轨31两组平行导轨上,且显示模块1的显示屏12和图像采集模块2的相机21均朝向载物台4,使得显示屏12、载物台4和相机21之间呈三角结构位置;通过接口控制器11的wi-fi模块与计算机5无线连接,计算机结合图像采集模块2中的距离传感器22,控制显示模块1与图像采集模块2中的第一直线电机13和第二直线电机23状态、可伸缩框架3中的伸缩电机34状态和相机21调焦量,使得相机21能够清晰观测到载物台4上的被测物6及其反射的显示屏12的镜像。
28.步骤二,条纹图像的显示与获取。
29.在计算机上使用配套开发的gui软件设置基于时域变频相移的同心圆环正弦条纹的编码参数,并通过wi-fi将相关参数传输给显示模块1;测量用各向同性的同心圆环正弦条纹图像由显示模块1中的嵌入式开发板11根据参数编码生成,并通过数据传输控制线传输至显示屏12,再经待测物体6表面的反射,由图像采集模块2中的相机21采集获取。
30.步骤三,条纹图像的解调与面形重构。
31.采用最小二乘n步相移解调算法处理由图像采集模块2中的相机21获得的各单频变形条纹图像,计算得到各单频截断相位;由时域相位展开(temporal phase unwrapping)技术,得到在最高频率下与待测物体6三维形貌相关的绝对相位分布;在光线反射定律的约束下,结合系统几何结构参数和图像采集模块2中的距离传感器22反馈回的距离参数,由绝对相位分布无歧义地计算出待测物6各方向上的面形斜率,根据斜率梯度评价函数得到待测物6最佳正交方向的面形梯度分布;最后使用梯度积分算法重构出待测物体6的三维面形分布。
32.步骤二中基于时域变频相移的同心圆环正弦条纹图像,其条纹频率可按照自然数
序列、倍数序列、幂函数序列、指数序列中的一种变化,在本实用新型中按倍数序列(4倍数值)变化;条纹图为等步长相移,每步相移量为,总相移步数。
33.步骤三中的斜率梯度评价函数,以正交方向上斜率平方和为评价指标,计算得到最佳正交方向面形梯度分布。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1