一种激光测距导盲装置的制作方法
1.本实用新型涉及导盲技术领域,具体涉及一种激光测距导盲装置。
背景技术:
2.目前,市面上尚无为视觉障碍者出行提供便利的导盲装置,视觉障碍者出行基本依靠盲杖。视觉障碍者出行过程中,使用者仅仅只能依靠盲杖对前方的触碰来被动的识别周围环境,在行进过程中无法主动的提示使用者前方有否障碍物,更不能提示前方障碍物的距离。
3.视觉障碍者发生摔跤等意外事件的时候,盲杖脱落以后,使用者由于视觉受限,无法准确的拾起盲杖。
4.视觉障碍者在发生迷路走失的时候,无法向寻找者准确描述当前位置及周围环境参照物,救助者无法及时准确确定视觉障碍者当前位置。
技术实现要素:
5.针对现有技术中的上述不足,本实用新型提供的一种激光测距导盲装置解决了视觉障碍者仅采用盲杖进行导盲,造成行动不便的问题。
6.为了达到上述发明目的,本实用新型采用的技术方案为:一种激光测距导盲装置,包括:主控模块、太阳能充电模块、三轴加速度传感器、语音提示模块、激光测距模块、定位模块和播放设备;
7.所述主控模块分别与三轴加速度传感器、语音提示模块、激光测距模块和定位模块通信连接;所述太阳能充电模块分别与主控模块、三轴加速度传感器、语音提示模块、激光测距模块和定位模块电连接;所述语音提示模块与播放设备电连接。
8.进一步地,三轴加速度传感器的型号为wt901b,其与主控模块的通信接口为uart。
9.进一步地,语音提示模块的型号为my1680u-12p,其与主控模块的通信接口为uart。
10.进一步地,激光测距模块包括:电阻r1、电阻r2、电阻r3、电阻r4、电阻r5、电阻r6、激光测距芯片u2、稳压芯片u1、接地电容c1、接地电容c2、接地电容c3、接地电容c4、nmos管q1a和nmos管q1b;
11.所述激光测距芯片u2的scl端分别与电阻r4的一端和nmos管q1a的源极连接,其sda端分别与电阻r3的一端和nmos管q1b的源极连接,其xshut端与电阻r6的一端连接,并作为激光测距模块的xshut端;所述激光测距芯片u2的gpio1端与电阻r5的一端连接,并作为激光测距模块的gpio1端;所述nmos管q1a的栅极分别与nmos管q1b的栅极、电阻r3的另一端、电阻r4的另一端、电阻r5的另一端、电阻r6的另一端、接地电容c3、接地电容c4、稳压芯片u1的out端、激光测距芯片u2的avdd端和激光测距芯片u2的avddvcsel端连接;所述nmos管q1a的漏极与电阻r2的一端连接,并作为激光测距模块的scl端;所述nmos管q1b的漏极与电阻r1的一端连接,并作为激光测距模块的sda端;所述电阻r1的另一端分别与电阻r2的另
一端、接地电容c1、接地电容c2和稳压芯片u1的in端连接,并作为激光测距模块的供电输入端与太阳能充电模块连接;所述激光测距模块的xshut端、激光测距模块的gpio1端、激光测距模块的scl端和激光测距模块的sda端分别与主控模块连接。
12.进一步地,定位模块包括:放大器u3、稳压芯片u5、gps单元u4、接地电容c5、接地电容c6、接地电容c7、接地电容c8、接地电容c9、电容c10、电容c11、接地电容c12、发光二极管d1、二极管d2、电阻r7、电阻r8、电阻r9、电阻r10、电感l1、电感l2、电池xh1、天线e1和天线e2;
13.所述稳压芯片u5的vcc端分别与接地电容c5和稳压芯片u5的en端连接,并作为定位模块的供电输入端与太阳能充电模块连接;所述稳压芯片u5的bp端与接地电容c6连接,其vout分别与接地电容c7、接地电容c8、发光二极管d1的正极、二极管d2的正极、放大器u3的shdn端、放大器u3的vcc端、接地电容c12、gps单元u4的vcc端和接地电容c9连接;所述gps单元u4的txd1端与电阻r9的一端连接,其rxd1端与电阻r10的一端连接,其v_bckp端分别与二极管d2的负极和电池xh1的正极连接,其vcc_rf端分别与gps单元u4的nc端和电阻r8的一端连接,其timepulse端与电阻r7的一端连接,其rf_in端分别与电感l1的一端、天线e1和电容c11的一端连接;所述发光二极管d1的负极与电阻r7的另一端连接;所述电阻r9的另一端作为定位模块的gps_txd端;所述电阻r10的另一端作为定位模块的gps_rxd端;所述电阻r8的另一端与电感l1的另一端连接;所述放大器u3的rfin端与电感l2的一端连接,其rfout端与电容c11的另一端连接;所述电感l2的另一端与电容c10的一端连接;所述电容c10的另一端与天线e2连接;所述定位模块的gps_txd端和定位模块的gps_rxd端分别与主控模块连接。
14.进一步地,gps单元u4的型号为neo-6m-gps。
15.进一步地,放大器u3的型号为max2659。
16.进一步地,所述稳压芯片u5的型号为rt9193。
17.本实用新型的有益效果为:
18.(1)、视觉障碍者在使用本装置导盲的时候,本装置能够主动识别行进过程中所遇见的障碍物,并对使用者发出语音提示。对比红外测距和超声波测距,激光测距更精确,使用过程中所受干扰影响更小。
19.(2)、语音提示模块内置多条语音信息,根据激光测距返回值,触发对应语音信息的播放,播报当前位置与前方障碍物的距离,对使用者及时提醒,方便其避让前方障碍物。
20.(3)、视觉障碍者在使用盲杖的时候,如果发生摔跤等意外,由于人的自我保护条件反射,盲杖很容易脱落。一旦脱落,使用者由于视觉受限,再拾起盲杖的时候很困难。本装置在自由落体状态下,可自动触发求助功能,主动发出声音,方便使用者拾回,并可发出求助语音信息,寻求周围人群的帮助。
21.(4)、使用者在迷路走失后拨打求助电话,由于视觉受限,无法向对方描述清楚当前位置及周围环境参照物。本装置利用gps定位模块,实时向服务器发送当前位置经、纬度,亲友可使用手机或者电脑实时获取使用者当前地图定位。
22.(5)、本装置可固定在任何盲杖上,在不影响当前使用习惯的基础上,为使用者的出行提供主动避让障碍物提示。充分考虑到使用者希望平等参与社会生活,有尊严的生活,而不愿意被周围人群发现的心理,本装置可脱离盲杖,佩戴在手臂上,前方障碍物提示语音
通过蓝牙耳机提示使用者,使得视觉障碍者出行与常人无异。
23.(6)、利用太阳能为本装置进行充电,提高续航时间,达到节能环保的目的。
附图说明
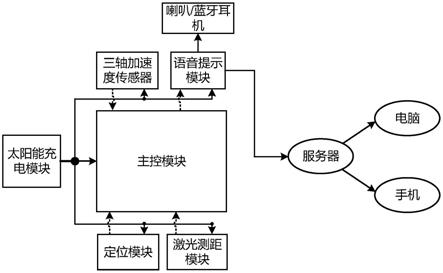
24.图1为一种激光测距导盲装置的结构示意图;
25.图2为激光测距模块的电路图;
26.图3为定位模块的电路图。
具体实施方式
27.下面对本实用新型的具体实施方式进行描述,以便于本技术领域的技术人员理解本实用新型,但应该清楚,本实用新型不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本实用新型的精神和范围内,这些变化是显而易见的,一切利用本实用新型构思的发明创造均在保护之列。
28.本实用新型的目的是提供一种利用激光测距,语音提示的导盲装置,以解决目前盲杖无法主动提示使用者前方障碍物的距离的装置。
29.使用者在摔跤等意外发生的时候,本装置利用三轴加速度传感器,识别自由落体状态,发出语音提示,方便使用者找寻本装置,并可向周围人群发出求助语音信息。
30.使用者在迷路走失后拨打求助电话,但是由于视觉受限,无法向对方描述清楚当前位置及周围环境参照物。本装置利用gps定位,实时反应出使用者当前位置定位,亲友可使用手机或者电脑及时获取使用者当前地图定位。
31.在使用过程中,在放电的同时,利用太阳能充电,为本装置电池进行充电,提高续航时间,达到节能环保的目的。在为出行提供更好的便利的同时,让使用者平等参与社会生活,更体面的生活,本实用新型的具体方案如下:
32.如图1所示,一种激光测距导盲装置,包括:主控模块、太阳能充电模块、三轴加速度传感器、语音提示模块、激光测距模块、定位模块和播放设备;
33.所述主控模块分别与三轴加速度传感器、语音提示模块、激光测距模块和定位模块通信连接;所述太阳能充电模块分别与主控模块、三轴加速度传感器、语音提示模块、激光测距模块和定位模块电连接;所述语音提示模块与播放设备电连接。
34.播放设备包括:蓝牙耳机和喇叭。
35.三轴加速度传感器的型号为wt901b,其与主控模块的通信接口为uart。
36.本装置利用三轴加速度传感器,如果识别出当前处于自由落体状态,发出语音提示,方便使用者找寻本装置,并可向周围人群发出求助语音信息。
37.语音提示模块的型号为my1680u-12p,其与主控模块的通信接口为uart。
38.如图2所示,激光测距模块包括:电阻r1、电阻r2、电阻r3、电阻r4、电阻r5、电阻r6、激光测距芯片u2、稳压芯片u1、接地电容c1、接地电容c2、接地电容c3、接地电容c4、nmos管q1a和nmos管q1b;
39.所述激光测距芯片u2的scl端分别与电阻r4的一端和nmos管q1a的源极连接,其sda端分别与电阻r3的一端和nmos管q1b的源极连接,其xshut端与电阻r6的一端连接,并作为激光测距模块的xshut端;所述激光测距芯片u2的gpio1端与电阻r5的一端连接,并作为
激光测距模块的gpio1端;所述nmos管q1a的栅极分别与nmos管q1b的栅极、电阻r3的另一端、电阻r4的另一端、电阻r5的另一端、电阻r6的另一端、接地电容c3、接地电容c4、稳压芯片u1的out端、激光测距芯片u2的avdd端和激光测距芯片u2的avddvcsel端连接;所述nmos管q1a的漏极与电阻r2的一端连接,并作为激光测距模块的scl端;所述nmos管q1b的漏极与电阻r1的一端连接,并作为激光测距模块的sda端;所述电阻r1的另一端分别与电阻r2的另一端、接地电容c1、接地电容c2和稳压芯片u1的in端连接,并作为激光测距模块的供电输入端与太阳能充电模块连接;所述激光测距模块的xshut端、激光测距模块的gpio1端、激光测距模块的scl端和激光测距模块的sda端分别与主控模块连接。
40.激光测距模块通过接收器所接收到的光子时间来计算距离,并将距离信息通过iic发送至主控模块,主控模块控制语音提示模块准确及时播报当前使用者与障碍物之间的距离。
41.如图3所示,定位模块包括:放大器u3、稳压芯片u5、gps单元u4、接地电容c5、接地电容c6、接地电容c7、接地电容c8、接地电容c9、电容c10、电容c11、接地电容c12、发光二极管d1、二极管d2、电阻r7、电阻r8、电阻r9、电阻r10、电感l1、电感l2、电池xh1、天线e1和天线e2;
42.所述稳压芯片u5的vcc端分别与接地电容c5和稳压芯片u5的en端连接,并作为定位模块的供电输入端与太阳能充电模块连接;所述稳压芯片u5的bp端与接地电容c6连接,其vout分别与接地电容c7、接地电容c8、发光二极管d1的正极、二极管d2的正极、放大器u3的shdn端、放大器u3的vcc端、接地电容c12、gps单元u4的vcc端和接地电容c9连接;所述gps单元u4的txd1端与电阻r9的一端连接,其rxd1端与电阻r10的一端连接,其v_bckp端分别与二极管d2的负极和电池xh1的正极连接,其vcc_rf端分别与gps单元u4的nc端和电阻r8的一端连接,其timepulse端与电阻r7的一端连接,其rf_in端分别与电感l1的一端、天线e1和电容c11的一端连接;所述发光二极管d1的负极与电阻r7的另一端连接;所述电阻r9的另一端作为定位模块的gps_txd端;所述电阻r10的另一端作为定位模块的gps_rxd端;所述电阻r8的另一端与电感l1的另一端连接;所述放大器u3的rfin端与电感l2的一端连接,其rfout端与电容c11的另一端连接;所述电感l2的另一端与电容c10的一端连接;所述电容c10的另一端与天线e2连接;所述定位模块的gps_txd端和定位模块的gps_rxd端分别与主控模块连接。
43.本装置gps定位模块,实时向服务器发送当前位置经、纬度,亲友可使用手机或者电脑及时获取使用者当前地图定位。
44.gps单元u4的型号为neo-6m-gps。放大器u3的型号为max2659。所述稳压芯片u5的型号为rt9193。
45.本装置可的固定在盲杖上,亦可脱离盲杖,佩戴在手臂上,提示语音可通过蓝牙耳机或喇叭提示使用者,使得视觉障碍者出行更加方便。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1