基于虚拟科里奥利力的全角模式谐振陀螺在线校正装置
1.本实用新型涉及一种基于虚拟科里奥利力的全角模式谐振陀螺在线校正装置。
背景技术:
2.现代武器装备已经进入小型化、智能化、信息化的时代,基于科里奥利力的微谐振陀螺具有体积小和成本低的优势,正在广泛应用于惯性武器装备中,中美两国也越来越重视陀螺技术的研发,将陀螺技术视为国防技术发展的重要环节。
3.其中,基于速率积分原理的全角微陀螺具有带宽高,量程无限大的优势,能够直接对角度进行测量,突破了传统陀螺精度低和测量范围有限的缺点。
4.全角模式最初是在半球谐振陀螺上成功运行,但由于加工工艺的不足和陀螺制作材料的限制,使得不同模态上的阻尼和刚度并不相同,最终导致陀螺的对称性不足。
5.因此,测量角度的误差会随着时间的增长而积累,造成严重的振荡和漂移,最终影响陀螺的长期稳定性和精准度。国内外的学术界,科研机构以及相关技术企业对此也投入了大量的人力和物力,不断提高运行全角模式的微谐振陀螺的对称性和长期稳定性。
6.经过长期的测试工作表明,基于现有精密加工技术的硅材料不足以继续提升微谐振陀螺的对称性,而石英半球谐振陀螺的造价十分昂贵,且良品率不足。因此,对于现阶段未能实现完全对称的微谐振陀螺,必须采取校正方式才能保证全角模式陀螺的长期稳定。
7.对于全角模式的微谐振陀螺校正方案整体分为以下两种:离线校正方案和在线实时校正方案。离线校正在短时间内能够维持陀螺的良好对称性,然而效果会随着时间的延长而失效;在线实时校正方案能够在线辨识陀螺的不对称性参数,对变化的不对称误差进行实时补偿,具有长期的有效性和实时性,是校正全角微陀螺不对称性和解决陀螺振荡漂移的根本办法。
8.通过施加高频电信号形成虚拟电旋转引入到陀螺中的方案,最初由美国的analog device公司研究团队以及日本东北大学的研究团队开始涉及,但这两个团队对于虚拟电旋转的应用仅局限于解决全角陀螺的死区问题,对于较低速率的旋转能够进行精准检测。因此,对于虚拟电旋转方案的应用仍待拓展,以解决全角微陀螺的不对称性误差问题。
技术实现要素:
9.本实用新型的目的在于提出一种基于虚拟科里奥利力的全角模式谐振陀螺在线校正装置,该装置通过引入高频信号等效为电旋转激励,在线辨识谐振陀螺的不对称性误差,并通过对陀螺施加静电力,来抵消谐振陀螺的不对称性误差。
10.本实用新型为了实现上述目的,采用如下技术方案:
11.基于虚拟科里奥利力的全角模式谐振陀螺在线校正装置,包括驱动电路和解调电路;其中,驱动电路和解调电路分别通过机电接口与谐振式陀螺相连;
12.驱动电路包括锁相环电路、加法器、乘法器、vga电路、电压源以及压控振荡器;
13.其中,锁相环电路有一个;
14.加法器有四个,即第一加法器、第二加法器、第三加法器以及第四加法器;
15.乘法器有五个,即第一乘法器、第二乘法器、第三乘法器、第四乘法器以及第五乘法器;
16.vga电路包括第一vga电路、第二vga电路、第三vga电路和第四vga电路;
17.电压源有两个,即第一电压源,第二电压源,两个电压源均为电压幅值可调节的电压源;
18.压控振荡器有两个,即第一压控振荡器和第二压控振荡器;
19.机电接口包括第一、第二、第三、第四、第五、第六、第七、第八、第九、第十、第十一、第十二、第十三、第十四、第十五、第十六、第十七、第十八以及第十九机电接口;
20.第七机电接口和第九机电接口分别与第一加法器的一个输入端相连;
21.第八机电接口和第十机电接口分别与第二加法器的一个输入端相连;
22.第一加法器和第二加法器的输出端分别与锁相环电路的一个输入端相连;锁相环电路的输出端以及第十一机电接口分别与第一乘法器的一个输入端相连;
23.第一乘法器的输出端分别连接到第二乘法器和第三乘法器的一个输入端上,第十二机电接口连接到第二乘法器另一个输入端,第十三机电接口连接到第三乘法器另一个输入端;
24.第二乘法器的输出端依次与第一vga电路、第三加法器的一个输入端相连,第三乘法器的输出端依次与第二vga电路、第四加法器的一个输入端相连;
25.第一电压源的电压输出端与第十四机电接口相连,第十四机电接口依次与第一压控振荡器、第三vga电路以及第四乘法器的一个输入端相连;
26.第六机电接口与第四乘法器的另一个输入端相连;第四乘法器的输出端与第三加法器的另一个输入端相连;第三加法器的输出端与第三机电接口相连;
27.第二电压源的电压输出端与第十五机电接口相连,第十五机电接口依次与第二压控振荡器、第四vga电路以及第五乘法器的一个输入端相连;
28.第五机电接口与第五乘法器的另一个输入端相连;第五乘法器的输出端与第四加法器的另一个输入端相连;第四加法器的输出端与第四机电接口相连;
29.第三机电接口和第四机电接口分别与谐振式陀螺的两个驱动信号输入端一对一相连;
30.解调电路包括c/v电路、相干解调电路、电压源以及fpga;
31.其中,c/v电路有两个,即第一c/v电路和第二c/v电路;相干解调电路有两个,即第一相干解调电路和第二相干解调电路;fpga有一个;
32.电压源有两个,即第三电压源,第四电压源,两个电压源均为电压幅值可调节的电压源;
33.谐振式陀螺的两个信号输出端分别与第一机电接口以及第二机电接口一对一相连;第一机电接口与第一c/v电路的输入端相连,第二机电接口与第二c/v电路的输入端相连;
34.第一c/v电路的输出端分别与第五机电接口以及第一相干解调电路的输入端相连;第二c/v电路的输出端分别与第六机电接口以及第二相干解调电路的输入端相连;
35.第一相干解调电路的同相信号输出端分别与第七机电接口和fpga的输入端相连,
第一相干解调电路的正交信号输出端分别与第八机电接口和fpga的输入端相连;
36.第二相干解调电路的同相信号输出端分别与第九机电接口和fpga的输入端相连,第二相干解调电路的正交信号输出端分别与第十机电接口和fpga的输入端相连;
37.fpga的输出端有五个,分别为能量信号输出端、驻波角的余弦信号输出端、驻波角的正弦信号输出端、第一误差校正信号输出端以及第二误差校正信号输出端;
38.其中,能量信号输出端与第十一机电接口相连;驻波角的余弦信号输出端、驻波角的正弦信号输出端分别与第十二机电接口、第十三机电接口一对一相连;
39.第一误差校正信号输出端与第十六机电接口相连;第十六机电接口的输出端依次与第三电压源、第十八机电接口以及陀螺相连;第二误差校正信号输出端与第十七机电接口相连;第十七机电接口的输出端依次与第四电压源、第十九机电接口以及陀螺相连。
40.本实用新型具有如下优点:
41.本实用新型述及了一种在线校正装置,该装置在驱动电路中引入永久式高频信号等效为电旋转激励,通过fpga在线辨识陀螺的不对称误差,并根据fpga反馈的校正信号,通过电修调(向陀螺施加静电力)将全角模式的谐振陀螺不对称性误差消除,提高全角陀螺的测量可靠性。本实用新型基于速率积分陀螺要求结构完全对称的理论限制,根据微陀螺由于加工缺陷导致的根本缺陷,校正微谐振陀螺的不对称误差,弥补了现有陀螺对称性的不足。
附图说明
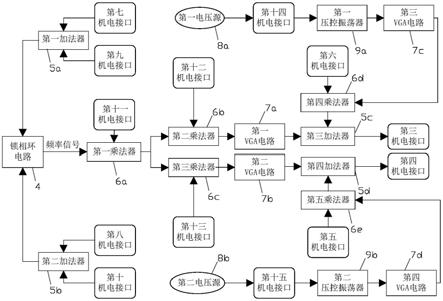
42.图1为本实用新型基于虚拟科里奥利力的全角模式谐振陀螺在线校正装置的结构框图;
43.图2为本实用新型实施例中驱动电路的结构示意图;
44.图3为本实用新型实施例中解调电路的结构示意图。
45.其中,1
‑
陀螺,2
‑
驱动电路,3
‑
解调电路,4
‑
锁相环电路,5a
‑
第一加法器,5b
‑
第二加法器,5c
‑
第三加法器,5d
‑
第四加法器,6a
‑
第一乘法器,6b
‑
第二乘法器,6c
‑
第三乘法器,6d
‑
第四乘法器,6e
‑
第五乘法器,7a
‑
第一vga电路,7b
‑
第二vga电路,7c
‑
第三vga电路,7d
‑
第四vga电路,8a
‑
第一电压源,8b
‑
第二电压源,9a
‑
第一压控振荡器,9b
‑
第二压控振荡器,10a
‑
第一c/v电路,10b
‑
第二c/v电路,11a
‑
第一相干解调电路,11b
‑
第二相干解调电路,12
‑
fpga,13a
‑
第三电压源,13b
‑
第四电压源。
具体实施方式
46.下面结合附图以及具体实施方式对本实用新型作进一步详细说明:
47.如图1所示,本实施例述及了一种基于虚拟科里奥利力的全角模式谐振陀螺在线校正装置,该装置包括与谐振式陀螺1通过机电接口相连的驱动电路2和解调电路3。
48.其中,机电接口有十九个,即:
49.第一、第二、第三、第四、第五、第六、第七、第八、第九、第十、第十一、第十二、第十三、第十四、第十五、第十六、第十七、第十八以及第十九机电接口。
50.驱动电路2通过第三机电接口和第四机电接口与驱动陀螺1相连。其中,第三机电接口向陀螺1传输x轴方向上的信号,第四机电接口向谐振传输y轴方向上的信号。
51.陀螺1通过第一机电接口和第二机电接口与解调电路3相连。其中,第一机电接口、第二机电接口分别用于接收来自陀螺1的x轴方向和y轴方向上的信号。
52.解调电路3对于陀螺1的输出信号进行解调并提取参数,得到能量数值和驻波角,并通过第五至第十三机电接口传输反馈信号至驱动电路2,维持驻波方向上的能量控制。
53.驱动电路2的结构如图2所示,该驱动电路2包括锁相环电路、加法器、乘法器、vga电路、电压源以及压控振荡器,其中,锁相环电路4有一个。
54.加法器包括第一加法器5a、第二加法器5b、第三加法器5c和第四加法器5d;乘法器包括第一乘法器6a、第二乘法器6b、第三乘法器6c、第四乘法器6d和第五乘法器6e。
55.vga电路有四个,即第一vga电路7a、第二vga电路7b、第三vga电路7c和第四vga电路7d,各个vga电路均为可变增益放大器电路。
56.电压源有两个,即第一电压源8a,第二电压源8b。
57.以上两个电压源均为电压幅值可调节的电压源,以便进行电压幅值调整。第一电压源8a,第二电压源8b均可以采用现有技术中已有的电压源。
58.压控振荡器有两个,即第一压控振荡器9a和第二压控振荡器9b。
59.驱动电路2中各个部件之间的连接关系如下:
60.第七机电接口和第九机电接口分别与第一加法器5a的一个输入端相连;第八机电接口和第十机电接口分别与第二加法器5b的一个输入端相连。
61.第一加法器5a和第二加法器5b的输出端分别与锁相环电路4的一个输入端相连;锁相环电路4的输出端以及第十一机电接口分别与第一乘法器6a的一个输入端相连。
62.第一乘法器6a的输出端分别连接到第二乘法器6b和第三乘法器6c的一个输入端上。
63.第十二机电接口连接到第二乘法器6b的另一个输入端上。
64.第二乘法器6b的输出端依次与第一vga电路7a、第三加法器5c的一个输入端相连。
65.第十三机电接口连接到第三乘法器6c的另一个输入端上。
66.第三乘法器6c的输出端依次与第二vga电路7b、第四加法器5d的一个输入端相连。
67.第一vga电路7a和第二vga电路7b用于提供陀螺1两个模态上的驱动信号。
68.第一电压源8a的电压输出端与第十四机电接口相连,第十四机电接口依次与第一压控振荡器9a、第三vga电路7c以及第四乘法器6d的一个输入端相连。
69.第六机电接口与第四乘法器6d的另一个输入端相连,第四乘法器6d的输出端与第三加法器5c的另一个输入端相连;第三加法器5c的输出端与第三机电接口相连。
70.第二电压源8b的电压输出端与第十五机电接口相连,第十五机电接口依次与第二压控振荡器9b、第四vga电路7d以及第五乘法器6e的一个输入端相连。
71.第五机电接口与第五乘法器6e的另一个输入端相连,第五乘法器6e的输出端与第四加法器5d的另一个输入端相连;第四加法器5d的输出端与第四机电接口相连。
72.第三机电接口和第四机电接口分别与陀螺1的两个驱动信号输入端一对一相连,如图1所示,第三机电接口与陀螺1的x模态的驱动信号输入端相连。
73.同理,第四机电接口与陀螺1的y模态的驱动信号输入端相连。
74.陀螺1的两个模态上的高频激励信号分别是第一电压源8a和第二电压源8b供给,由于两个电压源的幅值均可分别进行调解,因此,产生的高频激励信号的大小可调整。
75.信号流在驱动电路2中的走向为:
76.第七至第十机电接口分是经过解调电路3后得到的数值,分别是x模态相干解调后的同相信号ix、正交信号qx以及y模态相干解调后的同相信号iy和正交信号qy。
77.利用第一加法器5a将ix和iy相加,利用第二加法器5b将qx和qy相加。
78.锁相环电路4将第一加法器5a和第二加法器5b传输的信号进行处理,输出稳定的带有陀螺谐振频率信息的电压信号数值给第一乘法器6a。
79.第一乘法器6a将锁相环电路4输出的稳定的带有陀螺谐振频率信息的电压信号和第十一机电接口接收的解调电路3的能量信号数值相乘,实现能量控制。
80.经过第一乘法器6a相乘后的信号传输给第二乘法器6b和第三乘法器6c。
81.第二乘法器6b将第一乘法器6a的输出值和第十二接电机口的数值相乘,第三乘法器将第一乘法器6a的输出值和第十三接电机口的数值相乘。
82.其中,第十二和第十三机电接口接收的是fpga输出的驻波角的余弦值、正弦值。
83.第二乘法器6b的输出值经过第一vga电路7a将增益放大。
84.第三乘法器6b的输出值经过第二vga电路7b将增益放大。
85.由锁相环电路产生陀螺1所需要的谐振频率信号,通过第十一机电接口实现能量控制,再通过第十二机电接口和十三机电接口实现两个模态上的三角函数能量分配,最终输出至第一vga7a和第二vga电路7b形成激励信号,维持驻波角上的振荡。
86.第一电压源8a通过第十四机电接口给第一压控振荡器9a,产生高频电压信号,再通过第三vga电路7c进行增益放大,输出值给第四乘法器6d,再与第六机电接口的数值相乘,产生高频虚拟电旋转的电压信号,第四乘法器6d的输出值再给第三加法器5c。
87.第二电压源8b通过第十五机电接口给第二压控振荡器9b,产生高频电压信号,再通过第四vga电路7d进行增益放大,输出值给第五乘法器6e,再与第五机电接口的数值相乘,产生高频虚拟电旋转的电压信号,第五乘法器6e的输出值再给第四加法器5d。
88.第一vga电路7a的输出值给第三加法器5c,与第四乘法器6d的输出值(即高频激励信号)相加,输出值传给第三机电接口,产生驱动模拟信号进入陀螺1。
89.第二vga电路7b的输出值给第四加法器5d,与第五乘法器6e的输出值(即高频激励信号)相加,输出值传给第四机电接口,产生驱动模拟信号进入陀螺1。
90.驱动电路2采用模拟信号引入虚拟科里奥利力,并且构建了实际的模拟信号电路,模拟方案相比较数字方案来说,具有控制带宽高,响应速度快,相位延时低等优点。
91.本实施例驱动电路2采用的是高频激励和能量控制后的驱动信号叠加的方式,组合成为谐振式陀螺的驱动信号,在驱动电路增设高频激励方案,两个模态上可以独立增设高频激励信号,再将陀螺两个模态上的输出信号与高频激励信号进行混频处理,保证输入陀螺的信号是陀螺的谐振频率,再通过能量分配(第十二机电接口电路和第十三机电接口电路)来控制两个模态的驱动数值的大小,保持能量恒定,再将两部分信号相加进入陀螺。
92.在产生物理旋转后,通过下述解调电路3中的相干解调,将实际物理旋转信息和高频激励信息得到解调,利用高频激励信号检查陀螺的非对称误差。
93.本实用新型能够在不存在外部旋转的情况下,依旧得到不对称性产生的误差参数。
94.如图3所示,解调电路3包括c/v电路、相干解调电路、电压源以及fpga12。
95.其中,c/v电路有两个,即第一c/v电路10a和第二c/v电路10b。相干解调电路有两个,即第一相干解调电路11a和第二相干解调电路11b。
96.电压源有两个,即第三电压源13a,第四电压源13b。
97.以上两个电压源均为电压幅值可调节的电压源,以便进行电压幅值调整。第三电压源13a,第四电压源13b均可以采用现有技术中已有的电压源。
98.解调电路3中各个部件之间的连接关系如下:
99.第一机电接口与第一c/v电路10a的输入端相连,第一c/v电路10a的输出端分别与第五机电接口以及第一相干解调电路11a的输入端相连。
100.第二机电接口与第二c/v电路10b的输入端相连,第二c/v电路10b的输出端分别与第六机电接口以及第二相干解调电路11b的输入端相连。
101.第一相干解调电路11a的同相信号输出端分别与第七机电接口和fpga12的输入端相连,正交信号输出端分别与第八机电接口和fpga12的输入端相连。
102.第二相干解调电路11b的同相信号输出端分别与第九机电接口和fpga12的输入端相连,正交信号输出端分别与第十机电接口和fpga12的输入端相连。
103.fpga12的输出端有五个,分别为能量信号输出端、第一误差校正信号输出端、第二误差校正信号输出端、驻波角的余弦信号输出端以及正弦信号输出端。
104.其中,能量信号输出端与第十一机电接口相连。
105.余弦信号输出端、正弦信号输出端分别与第十二机电接口、第十三机电接口一对一相连。
106.通过fpga12的能量信号输出端、驻波角的余弦信号输出端以及正弦信号输出端,能够分别输出驻波能量信号以及驻波角的余弦信号和正弦信号,并反馈至驱动电路2中。
107.第一误差校正信号输出端与第十六机电接口相连,第十六机电接口依次与第三电压源、第十八机电接口以及陀螺(的校正电极)相连。
108.其中,第一误差校正信号输出端用于输出校正信号,并控制第三电压源13a输出相应幅值大小的直流电压,该直流电压作为校正静电力作用于陀螺1上,进行静电校正。
109.第二误差校正信号输出端与第十七机电接口相连,第十七机电接口依次与第四电压源13b、第十九机电接口以及陀螺(的校正电极)相连。
110.其中,第二误差校正信号输出端用于输出校正信号,并控制第四电压源13b输出相应幅值大小的直流电压,该直流电压作为校正静电力作用于陀螺1上,进行静电校正。
111.信号流在上述解调电路3中的走向为:
112.陀螺x轴方向上的输出信号经过第一机电接口传输至第一c/v电路10a中进行处理;陀螺y轴方向上的输出信号经过第一机电接口传输至第一c/v电路10b中进行处理。
113.第一c/v电路10a的输出信号传输至第五机电接口和第一相干解调电路11a;第二c/v电路10b的输出信号传输至第六机电接口和第二相干解调电路11b。
114.第一相干解调电路11a经过数字解调后得到x方向上的同相信号ix传输至fpga12和第七机电接口,解调后得到x方向上的正交信号qx传输至fpga和第八机电接口。
115.第二相干解调电路11b经过数字解调后得到y方向上的同相信号iy传输至fpga12和第九机电接口,解调后得到y方向上的正交信号qy传输至fpga和第十机电接口。
116.将x模态上的同相信号ix、正交信号qx以及y模态方向上的同相信号iy、正交信号
qy经过fpga12后,得到驻波能量信号和驻波角的角度信息。
117.其中,驻波能量信号传输至第十一机电接口。
118.其中,驻波角的余弦值以及驻波角的正弦值,分别传输至第十二机电接口和第十三机电接口,校正信号分别传输至第十六机电接口和第十七机电接口。
119.第十六机电接口将校正信号输送至第三电压源13a,第三电压源13a输出相应幅值大小的直流电压,该直流电压作为校正静电力作用于陀螺1上,对陀螺进行静电校正。
120.第十七机电接口将校正信号输送至第四电压源13b,第四电压源13b输出相应幅值大小的直流电压,该直流电压作为校正静电力作用于陀螺1上,对陀螺进行静电校正。
121.本实用新型中在线校正装置的优势在于:
122.驱动电路2采用模拟信号进行驱动,利于提高带宽和传输速率。两个模态的输出信号分别进入解调电路3进行相干解调,再将两个模态的数值分别进行整合,进入驱动电路2中的锁相环电路,提取两个模态上的谐振频率数值,相比传统方案,频率提取更为精准。
123.通过锁相环电路提取带有谐振频率信息的正弦信号,第十一机电接口通过乘法器与微控制器得到的能量数值相乘,减少了信号传输过程的噪声干扰,此过程能够完成对激励信号的幅值控制,然后再通过解调电路3中微控制器得到的角度信息反馈至驱动端,对总能量按照驻波角的方向进行能量分解,保证了谐振子在驻波角上的持续振荡。
124.本实用新型中高频激励的引入是采用非同源电压源进行激励,因而避免了电路噪声的影响;两个模态的输出信号经过放大后,直接利用到高频激励部分,与高频激励信号经过乘法器做混频处理,保证物理旋转和虚拟电旋转经过相干解调后能够完整的保留下来。
125.由于本实用新型采用非同源电压源对陀螺进行电修调,通过直接对陀螺施加静电力,来抵消陀螺的不对称性误差,避免了电路噪声影响的同时,实现了在线实时校正。
126.当然,以上说明仅仅为本实用新型的较佳实施例,本实用新型并不限于列举上述实施例,应当说明的是,任何熟悉本领域的技术人员在本说明书的教导下,所做出的所有等同替代、明显变形形式,均落在本说明书的实质范围之内,理应受到本实用新型的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1