一种路面车辙检测装置的制作方法
1.本技术涉及路面检测的领域,尤其是涉及一种路面车辙检测装置。
背景技术:
2.路面车辙深度直接反映了车辆行驶的舒适度及路面的安全性和使用期限,路面车辙深度的检测能为决策者提供重要的信息,车辙试验使决策者能为路面的维修、养护及翻修等做出优化决策。
3.现有的检测方式有人工检测和自动检测。人工检测是采用检测横竿横跨在车辙上部,并用尺量出横竿与车辙底部的间距。采用这种方法其效率是极低的,并只能随机抽样检测路面车辙深度。
4.自动检测是采用路面车辙自动测定车自动检测路面车辙深度。其方法就是利用横向布置的一排激光、超声、红外或其它非接触式位移传感器来快速连续测定路面车辙深度。其原理是在检测车的前端上安装配有非接触式位移传感器的横梁,并把传感器同车内的电脑相连,通过电脑对传感器测得的数据进行自动处理以获得路面车辙深度指标。
5.针对上述中的相关技术,发明人认为,当检测路段的表面存在较多杂物时,如石子、树枝等,易影响检测车所采集的车辙深度信息的准确度。
技术实现要素:
6.为了确保车辙深度检测的准确度,本技术提供一种路面车辙检测装置。
7.本技术提供的一种路面车辙检测装置,采用如下的技术方案:
8.一种路面车辙检测装置,包括检测车本体和设置于检测车本体前侧的横梁,所述横梁设有非接触式位移传感器,所述横梁的前侧还设有清扫组件,所述清扫组件的清扫方向为向前且斜向前进方向的两侧。
9.通过采用上述技术方案,检测车本体行驶检测的过程中,清扫组件能对检测车本体行进过程中的前方的杂物进行清除,即减少位于待检测的车辙内的杂物,从而减少该杂物对于非接触式位移传感器的探测影响,从而确保了检测精度;并且,清扫组件的清扫方向为向前且向外侧,因此能够将待检测车辙内的杂物向前向外侧扫除,以减少清除完的杂物还位于车辙内的情况发生,从而确保杂物的完全清除效果。
10.可选的,所述清扫组件包括设于所述横梁前侧的中部位置的转架和驱动电机,所述转架与所述横梁转动设置,所述转架的转动轴线沿所述横梁长度方向设置,所述驱动电机用于驱动所述转架转动,所述转架的外周面设有第一刷毛。
11.通过采用上述技术方案,通过驱动电机的驱动,以带动转架转动,从而使得转架上的第一刷毛持续转动以向前刷走待检测车辙内的杂物,快速且有效。
12.可选的,所述清扫组件还包括两个分别位于所述转架一侧的水平转盘,所述水平转盘下表面设有第二刷毛,所述驱动电机驱动所述水平转盘水平圆周转动,并且所述水平转盘自所述横梁中间至外侧方向转动。
13.通过采用上述技术方案,通过水平转盘的转动,使得水平转盘上的第二刷毛持续转动以向外侧刷走待检测车辙内的杂物,其与转架的第一刷毛的清除运动相结合,能够有效扫除走杂物,还能够有效确保杂物的清除完全性。
14.可选的,所述横梁转动设置有蜗杆,所述驱动电机驱动所述蜗杆转动,所述蜗杆两端的螺纹段的旋向相反;所述水平转盘同轴固定有与所述蜗杆一端螺纹段相适配的蜗轮。
15.通过采用上述技术方案,可以实现单驱动电机,同时对两个水平转盘施加方向相反的传动力,从而确保第二刷毛的正常清扫运动。
16.可选的,所述横梁设有多个吹气管,所述吹气管位于所述非接触式位移传感器和所述清扫组件之间,且所述吹气管的吹气端朝向所述清扫组件方向设置。
17.通过采用上述技术方案,当清扫组件启动时,吹气管进行吹气,以将清扫组件清扫过程中所引起的灰尘向前吹走,以减少该灰尘掉落附着于非接触式位移传感器上,从而确保非接触式位移传感器的检测精度。
18.可选的,所述横梁设有滤网,所述滤网位于所述吹气管的吹气端与所述清扫组件之间。
19.通过采用上述技术方案,通过设置滤网,在检测车本体平稳行进的过程中,清扫组件所引起的灰尘有一部分会通过空气流动而返流至非接触式位移传感器处,而滤网能够有效阻挡该部分灰尘,以确保非接触式位移传感器的清洁度;而滤网又位于吹气管的吹气端处,因此吹气管所吹的气流能够对滤网进行清洁,以确保滤网的过滤效果。
20.可选的,所述横梁与所述检测车本体可拆卸连接。
21.通过采用上述技术方案,便于对拆卸下来的横梁进行检修,以确保检测精度。
22.可选的,所述检测车本体与所述横梁之间设有用于带动所述横梁升降的升降组件。
23.通过采用上述技术方案,当检测车本体在非检测状态下行驶时,可通过升降组件以抬升横梁,以减少清扫组件对于路面的干涉,以减少行驶阻力。
24.综上所述,本技术包括以下至少一种有益技术效果:
25.通过设置清扫组件,能对检测车本体行进过程中的前方的杂物进行清除,以减少位于待检测的车辙内的杂物对于非接触式位移传感器的探测影响,从而确保了检测精度;
26.通过设置转架和水平转盘的同时运动,以向前且向外侧持续刷走待检测车辙内的杂物,从而能够有效扫除走杂物,还能够有效确保杂物的清除完全性;
27.通过设置吹气管和滤网,吹气管能够减少清扫组件清扫过程中所引起的灰尘掉落附着于非接触式位移传感器上的情况发生,从而确保非接触式位移传感器的检测精度,而滤网能够对返流的灰尘进行阻拦,以减少灰尘附着于非接触式位移传感器上的情况发生。
附图说明
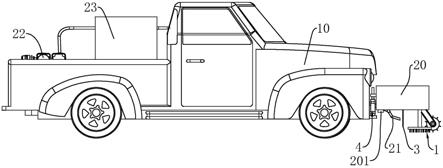
28.图1是本实施例的整体结构示意图。
29.图2是本实施例的用于体现横梁底部的各组件的示意图。
30.图3是本实施例的用于体现驱动结构的具体结构的局部剖视图。
31.图4是本实施例的升降组件的结构示意图。
32.附图标记说明:1、清扫组件;3、滤网;4、升降组件;10、检测车本体;11、转架;111、
第一刷毛;12、水平转盘;121、第二刷毛;122、转轴;13、驱动结构;131、驱动电机;132、蜗杆;133、蜗轮;20、横梁;201、非接触式位移传感器;21、吹气管;22、空压机;23、储气罐;41、液压缸;42、固定块;43、导向杆;44、滑块;441、滑孔。
具体实施方式
33.以下结合附图1
‑
4对本技术作进一步详细说明。
34.本技术实施例公开一种路面车辙检测装置。参照图1,路面车辙检测装置包括检测车本体10,检测车本体10的前侧设有水平设置的横梁20,横梁20设有非接触式位移传感器201。
35.使用时,划分待检测路段,使检测车本体10缓速行驶,期间,横梁20上非接触式位移传感器201对待检测车辙的深度进行检测,并利用检测车本体10内的电脑进行数据处理,以获得所需数据。
36.如图1所示,横梁20的前侧还设有清扫组件1和吹气组件,清扫组件1位于非接触式位移传感器201的前方,而吹气组件位于清扫组件1与非接触式位移传感器201之间。
37.在检测过程中,清扫组件1能对检测车本体10行进过程中的前方的杂物进行清除,以将该杂物向前向外侧扫走,从而减少位于待检测的车辙内的杂物,从而减少该杂物对于非接触式位移传感器201的探测影响,进而确保了检测精度;并且,清扫过程中,吹气组件持续吹气,以将清扫组件1所引起的扬尘吹走,即将灰尘吹离非接触式位移传感器201,以减少该灰尘掉落附着于非接触式位移传感器201上的情况发生,从而确保非接触式位移传感器201的检测精度。
38.如图1、图2所示,吹气组件包括依次连接的空压机22、储气罐23和多个吹气管21,空压机22和储气罐23均设置于检测车本体10上,吹气管21安装于横梁20的底部,且多个吹气管21位于清扫组件1与非接触式位移传感器201之间,多个吹气管21沿横梁20长度方向等距排布,吹气管21的吹气端朝前且倾斜朝下设置。
39.使用时,空压机22启动,以压缩空气至储气罐23内,储气罐23为吹气管21供气,吹气管21的吹气端朝向清扫组件1方向吹出压缩空气,以将灰尘吹离非接触式位移传感器201,以减少该灰尘掉落附着于非接触式位移传感器201上的情况发生。并且,横梁20的底部还安装有竖直设置的滤网3,滤网3位于吹气管21的吹气端与清扫组件1之间,滤网3用于阻挡未被吹气管21所吹走的灰尘,以进一步减少非接触式位移传感器201上所附着的灰尘。
40.如图2、图3所示,清扫组件1包括转架11、两个水平转盘12和用于同时驱动转架11和水平转盘12转动的驱动结构13,其中转架11水平设置,转架11转动设置于横梁20的前侧,转架11的外周面固定有第一刷毛111,转架11的转动方向如图3所示,即转架11转动时,其上的第一刷毛111能够持续转动以向前刷走待检测车辙内的杂物。
41.两个水平转盘12分别位于转架11的一侧,水平转盘12的下表面固定有第二刷毛121,第二刷毛121与第一刷毛111位于同一高度,水平转盘12同轴固定有竖直设置的转轴122,转轴122与横梁20转动连接,驱动结构13可驱动转轴122转动,从而带动水平转盘12转动,使得水平转盘12上的第二刷毛121持续向外侧转动以刷走待检测车辙内的杂物,以有效确保杂物的清除完全性。
42.如图3所示,驱动结构13包括驱动电机131、蜗杆132和蜗轮133,其中驱动电机131
固定于横梁20底部,蜗杆132水平设置,且蜗杆132与横梁20转动设置,驱动电机131通过齿轮传动带动蜗杆132转动,蜗杆132与转架11之间通过链轮链条的传动方式连接,即驱动电机131的扭矩可传递至转架11上,以带动转架11转动。
43.蜗杆132的两端的螺纹段的旋向相反,蜗轮133同轴固定于转轴122上,蜗轮133与蜗杆132一端的对应螺纹段配合,从而使得驱动电机131的扭矩能够带动两个水平转盘12同时且反向转动。
44.为了便于检测车本体10的非检测状态下的正常行驶,做出了如下设置,如图4所示,检测车本体10的前侧设有升降组件4,升降组件4用于带动横梁20进行升降,以将横梁20抬高,使得第一刷毛111和第二刷毛121离地,从而减少第一刷毛111和第二刷毛121的阻尼。
45.如图4所示,检测车本体10的前侧固定有竖直设置的导向杆43,横梁20固定有滑块44,导向杆43竖向穿过滑块44上的滑孔441,使得横梁20可相对检测车本体10进行竖向滑移。
46.升降组件4可以为液压缸41、电动推杆,本实施例中优选为液压缸41,液压缸41的缸体固定于检测车本体10的前侧,液压缸41的活塞杆竖向设置,横梁20设有固定块42,固定块42与液压缸41的活塞杆通过螺栓螺母固定连接,因此通过液压缸41的进给回退,可以带动横梁20进行升降运动;并且可以通过解除螺栓螺母的连接,将横梁20拆卸下来,以便于对清扫组件1和非接触式位移传感器201进行检修。
47.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1