一种用于水下探测器的定位设备的制作方法
1.本实用新型提供的一种用于水下探测器的定位设备,属于定位技术领域。
背景技术:
2.目前的水下探测器扮演者重要角色,对于海洋测绘、海洋捕捞、海底科学研究、海底资源勘查、海洋工程都起到非常大的作用,但是探测器的定位设备也需要不断完善,目前的定位设备系统繁杂,定位不精确。
技术实现要素:
3.本实用新型提供的一种用于水下探测器的定位设备,结构简单,多方面定位,易于查找。
4.本实用新型提供的一种用于水下探测器的定位设备,包括漂浮壳体,所述漂浮壳体呈顶部向下凹陷的半球体状,所述漂浮壳体的顶端固定安装有薄板,所述漂浮壳体的内壁安装有驱动部,所述驱动部通过转轴固定连接有转板,所述转轴和薄板转动连接,所述转板位于薄板的上方,所述转板的顶端卡合连接有转动盘,所述转动盘呈圆台状,所述转动盘的表面两侧分布有接收换能器,所述接收换能器的上方位于转动盘的表面设置有中频换能器,所述转动盘的表面设置有太阳能电板,所述转动盘的内部设置有蓄电池、中央处理器、gps定位器,所述转动盘的顶端面安装有自动收放线轮部,所述自动收放线轮部包括数据线缆,所述数据线缆远离自动收放线轮部的一端连接有水下探测器,所述水下探测器的尾端安装有推进器,所述水下探测器的顶端面安装有超声波发生器,所述蓄电池和太阳能电板电性连接,所述蓄电池、接收换能器、中频换能器、gps定位器、中央处理器电性连接。
5.所述接收换能器、中频换能器分别设置有2个。
6.所述薄板上设置有契合转轴外壁的通孔,所述转轴穿过通孔连接转板,所述转轴和薄板转动连接。
7.所述转板的顶端四周和转动盘的底端四周均固定设置有相互卡合的传动齿,所述转板和转动盘通过传动齿卡合连接。
8.所述太阳能电板表面设置有防水薄膜。
9.所述自动收放线轮部包括绕线电机、绕线轴、绕线轮、两个挡板,两个所述挡板固定安装在转动盘顶端,所述绕线轴安装在两个挡板之间,所述绕线电机和绕线轴驱动连接,所述绕线轴远离绕线电机的一端和挡板转动连接,所述所述数据线缆的一端缠绕先缠绕在绕线轮上再缠绕在绕线轴上后另一端延伸进水下,所述数据线缆的长度可进行自由收放线调节,所述转动盘设置有供数据线缆穿过的穿孔通道。
10.所述蓄电池和绕线电机电性连接。
11.所述自动收放线轮部还包括用于判断是否自动收放线的传感器,传感器与中央处理器的输入端连接,所述中央处理器的输出端与绕线电机电性连接。
12.所述驱动部包括微型电机和减速器,所述蓄电池、微型电机、减速器电性连接,所
述驱动部驱动转轴转动。
13.所述转动盘的表面设置有尺寸大于中频换能器的滑槽,所述中频换能器滑动设置在滑槽内,所述转动盘的表面位于滑槽的下方设置有契合接收换能器的圆槽,所述圆槽边缘口的内径小于接收换能器的最大直径。
14.本实用新型的有益效果:
15.利用转动盘表面分布的接收换能器接收来自水下探测器的超声波发生器发射的超声波信号,并将信号传输给转动盘内部的中央处理器,并由中央处理器计算每个接收换能器距离水下探测器的距离,进而确定水下探测器的位置,同时中频换能器设置有2个,朝不同的方向发射超声波信号,再利用驱动部的设计以及转动盘表面设置的滑槽的结构,启动驱动部,驱动部带动转轴转动,转轴带动转板、转动盘转动,中频换能器在滑槽内有小范围的滑移,以调整中频换能器的信号发射角度,再结合gps定位器的定位确定水下探测器的物理坐标,定位准确;利用数据线缆拖拽自动收放线轮部,进而拖拽漂浮壳体,使得漂浮壳体在水下探测器的正上方的附近区域,数据线缆的长度可进行自由收放线调节。
附图说明
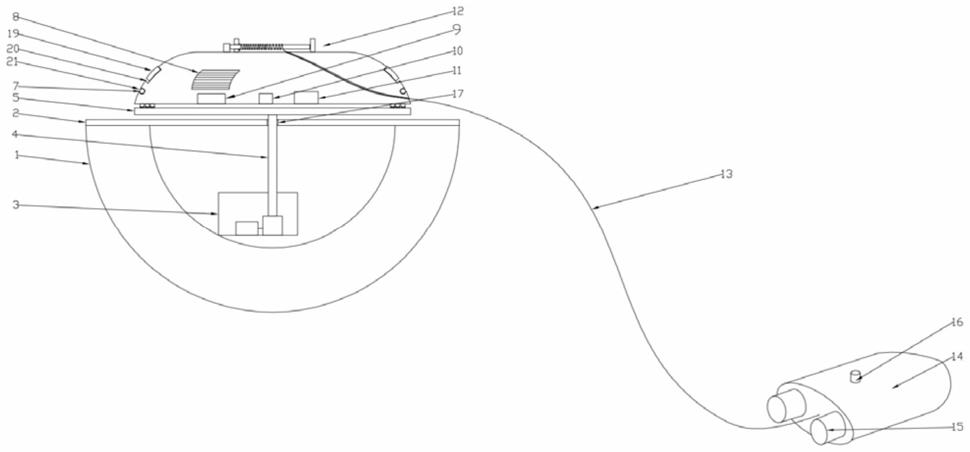
16.图1为本实用新型提供的一种用于水下探测器的定位设备的结构示意图。
17.图2为本实用新型提供的一种用于水下探测器的定位设备的转动盘的结构示意图。
18.图3为本实用新型提供的一种用于水下探测器的定位设备的自动收放线轮部的结构示意图。
19.图4为本实用新型提供的一种用于水下探测器的定位设备的圆槽的结构示意图。
20.(1、漂浮壳体,2、薄板,3、驱动部,3.1、微型电机,3.2、减速器,4、转轴,5、转板,6、转动盘,7、接收换能器,8、太阳能电板,9、蓄电池,10、中央处理器,11、gps定位器,12、自动收放线轮部,12.1、绕线电机,12.2、绕线轴,12.3、挡板,13、数据线缆,14、水下探测器,15、推进器,16、超声波发生器,17、通孔,18、穿孔通道,19、中频换能器,20、滑槽,21、圆槽)
具体实施方式
21.以下结合附图对本实用新型作进一步说明
22.根据图1-4所示,本实用新型提供的一种用于水下探测器,包括漂浮壳体1,所述漂浮壳体1呈顶部向下凹陷的半球体状,所述漂浮壳体1的顶端固定安装有薄板2,所述漂浮壳体1的内壁安装有驱动部3,所述驱动部3通过转轴4固定连接有转板5,所述驱动部3包括微型电机3.1和减速器3.2,所述蓄电池9、微型电机3.1、减速器3.2电性连接,所述驱动部3驱动转轴4转动,所述薄板2上设置有契合转轴4外壁的通孔17,所述转轴4穿过通孔连接转板5,所述转轴4和薄板2转动连接,所述转轴4和薄板2转动连接,所述转板5位于薄板2的上方,所述转板5的顶端卡合连接有转动盘6,所述转板5的顶端四周和转动盘6的底端四周均固定设置有相互卡合的传动齿,所述转板5和转动盘6通过传动齿卡合连接,所述转动盘6呈圆台状,所述转动盘6的表面两侧分布有接收换能器7,所述接收换能器7的上方位于转动盘6的表面设置有中频换能器19,所述转动盘6的表面设置有尺寸大于中频换能器19的滑槽20,所述中频换能器19滑动设置在滑槽20内,所述转动盘6的表面位于滑槽20的下方设置有契合
接收换能器7的圆槽21,所述圆槽21边缘口的内径小于接收换能器7的最大直径,所述转动盘6的表面设置有太阳能电板8,所述太阳能电板8表面设置有防水薄膜,所述转动盘6的内部设置有蓄电池9、中央处理器10、gps定位器11,所述转动盘6的顶端面安装有自动收放线轮部12,所述自动收放线轮部12包括数据线缆13,所述自动收放线轮部12包括绕线电机12.1、绕线轴12.2、绕线轮、两个挡板12.3,两个所述挡板固定安装在转动盘6顶端,所述绕线轴12.2安装在两个挡板12.3之间,所述绕线电机12.1和绕线轴12.2驱动连接,所述绕线轴12.2远离绕线电机12.1的一端和挡板12.3转动连接,所述所述数据线缆13的一端缠绕先缠绕在绕线轮上再缠绕在绕线轴12.2上后另一端延伸进水下,所述数据线缆13的长度可进行自由收放线调节,所述转动盘6设置有供数据线缆13穿过的穿孔通道18,所述蓄电池9和绕线电机12.1电性连接,所述自动收放线轮部12还包括用于判断是否自动收放线的传感器,传感器与中央处理器10的输入端连接,所述中央处理器10的输出端与绕线电机12.1电性连接,所述数据线缆13远离自动收放线轮部12的一端连接有水下探测器14,所述水下探测器14的尾端安装有推进器15,所述水下探测器14的顶端面安装有超声波发生器16,所述蓄电池9和太阳能电板8电性连接,所述蓄电池9、接收换能器7、中频换能器19、gps定位器11、中央处理器10电性连接,所述接收换能器7、中频换能器19分别设置有2个。
23.本实用新型的工作原理
24.利用太阳能电板8将光能转化为电能,并将电能储存在蓄电池9内,蓄电池9给定位设备供电,水下探测器14通过推进器15所带的动力推进,通过数据线缆13与水面的自动收放线轮部12连接,自动收放线轮部12和转动盘6连接,转动盘6表面的接收换能器7接收超声波发生器16发射的超声波,并将超声波传给中央处理器10,中央处理器10计算每个接收换能器7距离水下探测器14的距离,进而确定水下探测器14的位置,启动驱动部3,驱动部3带动转轴4转动,转轴4和薄板2转动连接,转轴4带动转板5转动,又转板5和转动盘6卡合连接,转动盘6转动,再利用转动盘6表面两侧的滑槽20的设计,中频换能器19在滑槽20内有小范围的滑移,以调整中频换能器19的信号发射角度,进而更加准确判定方位,再结合gps定位器11确定水下探测器14的物理坐标,同时通过数据线缆13拖拽自动收放线轮部12,自动收放线轮部12连接转动盘6,转动盘6和转板5卡合连接,转动盘6带动转轴4、薄板2、漂浮壳体1在水面上漂移,同时推进器15的设计,可保持漂浮壳体1漂在水面上,在数据线缆14的拖拽下,转动盘6连同漂浮壳体1保持在水下探测器14上方附近水面区域。当需要放线的时候,数据线缆13紧绷,利用传感器,将信号传输给中央处理器10,中央处理器10给绕线电机12.1发送命令,绕线电机12.1带动绕线轴12.2旋转,以此进行放线,当需要收线的时候,数据线缆13松弛,利用传感器,将信号传输给中央处理器10,中央处理器10给绕线电机12.1发送命令,绕线电机12.1带动绕线轴12.2反向旋转,以此进行收线,本实用新型结构简单,定位准确。
25.以上对本实用新型及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1