一种水面活动平台用的水声接收器位置实时自校准装置的制作方法
1.本实用新型涉及水下试验与测试技术领域,具体为一种水面活动平台用的水声接收器位置实时自校准装置。
背景技术:
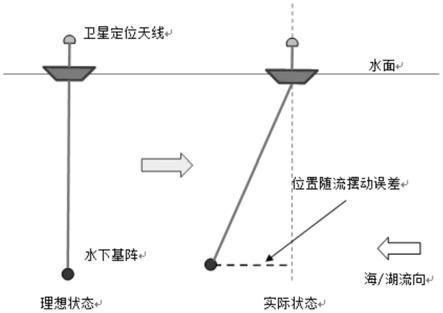
2.基于浮标、水面无人器动平台或舰船等水面活动平台搭载安装方式的水声跟踪定位系统在海/湖上使用时,为规避或降低恶劣水文条件、复杂水面工况以及近水面背景干扰噪声大等不利因素的影响,需将与水面活动平台连接的水声接收器(单水听器或基阵)通过柔性电缆布放至一定深度。但同时带来了另一个问题:受风浪、水流的影响,水声接收器与水面平台的相对位置摆动或漂移现象严重,如附图1所示,使得接收器的水下实际位置参数已无法直接使用水面平台的高精度卫星定位数据替代,若该问题不予解决,必然导致水声测量精度大大降低。若系统为多个水声测量节点构成的长基线系统,则水下基阵阵型一直处于随流摆动状态,特别是在恶劣水文或高海/湖况条件下问题更加突出,由此带来的定位误差可能造成系统无法有效使用。
3.对此,以往通常利用水声接收器的布放缆长、布放深度及水流流向等数据进行粗略补偿修正,取得了一定的改善效果。但水下航行器技术的发展对水声跟踪定位测量系统的测量精度、作用范围等能力及水平提出了越来越高的要求,传统补偿修正方式因参与计算的几个参数本身又存在较大的不确定性(如流向数据难以实现原位实时精细测量),在高海/湖况、大流速条件下长缆布放使用时,仍然无法有效解决水声接收器位置的随流摆动难题。
4.实用新型的内容
5.为了解决上述技术问题本实用新型的目的是了一种超短基线水声自发自收定位校准装置方案,主要用于采用柔性连接布放(如吊放、悬浮或拖曳)方式的基于浮标、水面无人器动平台或舰船等类型的水声定位跟踪测量系统声接收器的水下位置参数的实时自校准,包括多个声接收器(水声测量节点)构成的长基线阵阵型自校准,也可用于其他非刚性连接水下传感器的实时位置测量。可为基于水面活动平台的高精度水声定位跟踪测量基阵的现场、实时校准提供可行、有效的技术途径,能够解决在高海/湖况、大流速条件下,柔性长缆悬浮、吊放或拖曳基阵的水声接收器随流摆动导致系统定位精度降低等系列问题。
6.本实用新型所采用的技术方案是:
7.本实用新型技术是通过以上技术方案或者手段实现的。装载于水面活动平台上的超短基线定位基阵和校准信号处理设备,与水面活动平台上的供电系统连接并向水下延伸的柔性水密承重电缆,柔性水密承重电缆的下端头连接安装有水声接收器、水声接收器和高频发射换能器,所述水声接收器和高频发射换能器相接触式或近距离分布安装,所述超短基线定位基阵能接收高频发射换能器发出的水声信号并连接校准信号处理设备;
8.进一步,超短基线定位基阵、高频发射换能器与水声接收器的工作频段不同。同时超短基线定位基阵接收指向性为水平全向、垂直下半空间不小于
±
30
°
,自校准装置的水声
校准信号工作频段不小于 95khz,发射声源级不大于175db。
9.进一步,水面活动平台还包括有卫星定位设备,与校准信号处理设备数据连接。而水声接收器安装在水密电子舱内。水面活动平台为测量船、水面无人器、浮标等其中的一种。
10.与现有技术相比本实用新型技术所具有的有益效果是:
11.本实用新型专利采用自发自收式超短基线高频水声定位方案,在低发射声源级条件下、良好接收开角范围内,实现短距离柔性连接(布放)的水声接收器水下位置的实时高精度自校准,也解决了传统测量方式在恶劣水况条件下布放过长和测量误差较大、测量不准确等问题。
12.本实用新型的工作原理介绍:
13.本专利所描述的装置主要由装载于水面活动平台上的超短基线定位基阵及校准信号处理设备,连接于柔性电缆下端头的水声信号发射器(安装于水密电子舱内)和高频发射换能器组成,可在近距离、有效开角范围内直接对水下水声接收器进行高精度定位,为基于水面活动平台的高精度水声定位跟踪测量基阵现场、实时校准提供可行、有效的技术手段,可解决在高海/湖况、大流速条件下,柔性长缆悬浮、吊放或拖曳基阵的水声接收器随流扰动导致系统定位精度降低的难题,同时采用声兼容设计方案,大大提高了实用性。
附图说明
14.图1:柔性连接式水声测量基阵随流漂移示意图;
15.图2:超短基线定位器组成结构示意图;
16.图3:工作原理框图。
17.其中:1、小型化超短基线定位器;2、超短基线定位基阵;3、校准信号处理设备;4、水声接收器;5、高频发射换能器;6、卫星定位设备;7、承重电缆;8、水密电子舱。
具体实施方式
18.下面结合具体实施例对本实用新型技术的技术方案做优选的详细说明,但本实用新型并不局限于以下技术方案。
19.实施例1:本实用新型主要在水面活动平台上安装一套小型化超短基线定位器1,主要由装载于水面活动平台上的超短基线定位基阵及校准信号处理设备,连接于柔性电缆下端头的水声接收器4(安装于水密电子舱内)和高频发射换能器5组成,如附图2所示。准备好所有实施准备工作之后,将水声跟踪定位系统布放入水一定深度后,启动校准装置上电工作;
20.优选的,控制安装于柔性电缆端头的水声信号发射器4通过高频发射换能器5周期性(或根据控制指令)发射基阵校准水声脉冲信号;
21.优选的,装载于水面活动平台上的超短基线定位基阵2接收基阵校准水声脉冲信号,校准信号处理设备3完成信号检测处理及超短基线定位解算,得到接收器水平位移信息,并发送至船基/岸基水声定位跟踪系统数据解算处理设备;
22.优选的,船基/岸基水声定位跟踪系统数据解算处理设备利用校准装置上传的水声接收器位置信息,实时修正通过水面平台的卫星定位设备6直接获取的基阵位置参数,达
到降低长缆随流漂移误差的目的。
23.优选的,采用高频水声信号自发自收的超短基线水声定位方式进行水声接收器的水下位置校准,校准装置与主测量功能的水声接收器工作于不同频段,可现场、实时完成水声接收器4水下位置自校准;校准装置高频发射换能器5与水声接收器4为一体化设计,空间位置近似重叠,使用时对校准用高频发射换能器5定位即相当于主要对测量功能的水声接收器4定位。
24.在实际使用过程中,因为水面情况复杂为规避或降低恶劣水文条件、复杂水面工况以及近水面背景干扰噪声大等不利因素,需要将水声定位系统布放至一定深度以此来消除水面情况对水声定位系统的干扰。同时也需要将水声接收器4与高频发射换能器5在空间上尽可能紧靠在一起,因为工作原理需要用高频发射换能器来表示水声接收器的位置信息。每个水面活动平台下方的水声接收器4用于接收来自水下深处的水声设备发出的水声信号并传输至校准信号处理设备3 等待处理,另一方面,水声接收器控制高频发射换能器5向超短基线定位基阵2发射出特定频段的校准水声信号,超短基线定位基阵2接收到高频发射换能器5的信号后通过校准信号处理设备3,获得水声接收器4的真实位置信息,从而可以根据卫星定位设备6等多个参数传送至岸基或海面活动平台的终端处理设备进行位置计算,提高水声测量精度出,得到水下深处的水声设备的精准位置。
25.实施例2:、校准设备研制实施中建议的主要性能指标为:
26.(a)水声校准信号工作频段:不小于95khz;
27.(b)发射声源级:不大于175db;
28.(c)接收指向性:水平全向、垂直下半空间不小于
±
30
°
;
29.(d)水平自定位精度:优于r
×5‰
(r为斜距);
30.(e)重复周期:1s~10s,1s可调。
31.优选的,在近距离(如校准距离r不大于100m)、一定开角范围(超短基线阵接收指向性为水平全向、垂直下半空间不小于
±
30
°
) 内实现水下水声接收器的高精度位置校准,水平位置校准精度可优于 r
×5‰
m;
32.优选的,采用高频(水声校准信号工作频段不小于95khz)、低声源级(发射声源级不大于175db)自校准信标设计方案,可有效解决校准装置与主功能水下声学系统及试验水域内其他水下声呐系统的声兼容问题。这些方面是会有很大的影响因素,是必须要进行设备或参数的精准设定。
33.在实际情况中,同时使用的舰船/潜艇声纳设备、水下目标定位合作信标或鱼雷自导等水声信号的是会相互影响和干扰的。所以在校准的过程中是需要给定校准过程和参数的保证良好的自校准能力,是能否校准和获取相应的位置参数是十分必要的。而且,在实际的测量环境之中,应该用多个测量水声定位系统或者设置多个浮标等对探测物进行多个数据的测量,经过最终设备的处理可以获得更为准确的位置地理信息,便于在高精度海上或者复杂水文情况下的定位、搜救、救援工作的开展提供可靠的信息支持。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1