一种便携式电梯门锁啮合深度测量装置的制作方法
1.本实用新型属于电梯检测技术领域,具体涉及一种便携式电梯门锁啮合深度测量装置。
背景技术:
2.电梯门锁是轿门和层门之间的锁紧装置,电梯门锁包括门锁固定件和锁钩,当电梯闭合瞬间,锁钩向下摆动,与门锁固定件啮合,使得电梯门在不受外力的作用下能自动闭合并且使得电梯门保持闭合状态,防止层门和轿门被随意打开。
3.目前,根据新的检验规程tsgt7001
‑
2009《电梯监督检验与定期检验规则一曳引与驱动电梯》的规定,电梯门锁的啮合深度需达到7mm以上,电梯才能启动。根据规定,锁钩与门锁固定件啮合的深度须达到7mm以上,但是由于电梯门锁位置及结构比较特殊,人们直接测量较为困难,当前主要检验方法是目测法,即先通过目测进行初步预判,然后再进行判断是否需要具体测量,该方法在目测判断时可能出现漏判、误判的情形,并且由于电梯门锁位置比较特殊,导致难以选择测量点位,使得每次测出来的门锁啮合深度的误差较大,检验结果可靠性及准确性都有待进一步提高。
技术实现要素:
4.本实用新型的目的是提供一种便携式电梯门锁啮合深度测量装置,用来解决门锁啮合深度的测量结果不精确的问题。
5.为实现上述技术目的,本实用新型采用的技术方案如下:
6.一种便携式电梯门锁啮合深度测量装置,包括相对设置的第一测量机构和第二测量机构,第一测量机构包括第一固定件和第二固定件,第一固定件垂直设置在第二固定件上,第二固定件的两端分别设置有第一量爪和第二量爪,第一量爪和第二量爪位于同一水平线上;第二测量机构包括第三固定件,第三固定件的两端分别设置有第三量爪和第四量爪,第三量爪和第四量爪位于同一水平线上;第一固定件固定连接有固定块,固定块上设置有位移传感器,位移传感器电连接有检测仪,固定块内滑动连接有游标尺,游标尺远离固定块的一端与第三固定件固定连接。
7.进一步,第二固定件靠近第一固定件的一面安装有多个圆筒,每个圆筒内滑动连接有圆形螺母,圆形螺母端部的直径大于圆筒的内径,每个圆形螺母螺纹连接有连接杆,第二固定件的两端开设有与连接杆相对应的通孔,每个连接杆的一端从第二固定件的通孔穿出。通过该设置使得连接杆可在圆筒以及通孔内上下滑动;并且由于圆形螺母与连接杆螺纹连接,圆形螺母可对连接杆起到限位作用,防止连接杆上下移动过多脱离第二固定件;还可以使得第二测量机构顺着连接杆移动方向而移动,由于连接杆与第一次测量机构和第二测量机构互相垂直,所以第二测量机构随着连接杆移动是沿着垂直方向移动,可防止第二测量机构移动方向出现偏差,导致测量结果出现误差。
8.进一步,第三固定件的两端分别开设有螺纹孔,每个所述连接杆通过螺纹孔与第
三固定件螺纹连接。通过本设置,连接杆与第三固定件通过螺纹孔螺纹连接,可以方便拆卸和安装连接杆。
9.进一步,第一量爪和第三量爪互相平行且不在同一垂直线上,第二量爪和第四量爪互相平行且不在同一垂直线上。这样的设置可使得在检测过程中,锁钩可以放置在第一测量机构和第二测量机构之间,并且不会影响到锁钩上下摆动。
10.进一步,游标尺上设置有刻度线。当出现位移传感器无法使用的情形时,通过该设置,人们可直接读取游标尺上的刻度,从而得知第一测量机构和第二测量机构之间的距离,得到锁钩与门锁固定件啮合深度的具体数值。
11.进一步,第二固定件的表面设置有气泡水平仪。通过设置气泡水平仪,在测量过程中可判断第一测量机构是否处于水平状态,保证测量结果的准确性。
12.采用上述技术方案的实用新型,具有如下优点:
13.本实用新型通过设置相对的第一测量机构和第二测量机构,第一量爪和第三量爪互相平行且不在同一垂直线上,第二量爪和第四量爪互相平行且不在同一垂直线上,第一测量机构的第一固定件固定连接有固定块,固定块上设置有位移传感器,位移传感器电连接有检测仪,固定块内滑动连接有游标尺,游标尺远离固定块的一端与第三固定件固定连接。在测量时,先将第一测量机构的下表面与电梯门锁固定件的上表面贴合,再上下移动调整第二测量机构,使得锁钩放置在第一测量机构和第二测量机构之间,且锁钩的钩尖与第二测量机构的上表面相抵触,由于游标尺的一端与第二测量机构固定连接,当第二测量机构受到锁钩上下摆动的影响而上下移动时,第二测量机构移动也会带动游标尺上下移动。当门锁锁紧闭合瞬间,锁钩向下摆动与电梯固定件啮合,而第二测量机构和游标尺也会随着锁钩摆动而移动,通过位移传感器测量游标尺的位移值,并将数据传递给检测仪,检测仪显示的数值即为门锁啮合深度,通过本实用新型的方案,可准确测量出锁钩与门锁固定件啮合深度的数值,可直接进行判断电梯门锁是否符合安全标准。
附图说明
14.本实用新型可以通过附图给出的非限定性实施例进一步说明;
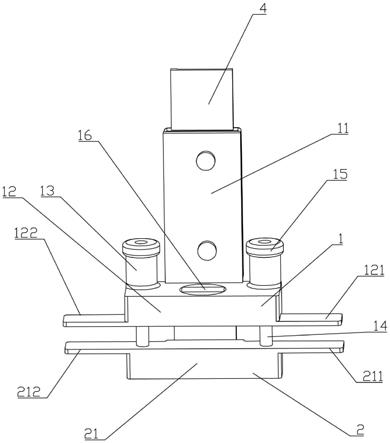
15.图1为本实用新型一种便携式电梯门锁啮合深度测量装置的结构示意图;
16.图2为图1中后视图的结构示意图;
17.图3为图1中剖面图的结构示意图;
18.主要元件符号说明如下:
19.第一测量机构1、第一固定件11、第二固定件12、第一量爪121、第二量爪122、通孔 123、圆筒13、连接杆14、圆形螺母15、气泡水平仪16、第二测量机构2、第三固定件21、第三量爪211、第四量爪212、螺纹孔213、固定块3、位移传感器31、游标尺4。
具体实施方式
20.以下将结合附图和具体实施例对本实用新型进行详细说明,需要说明的是,在附图或说明书描述中,相似或相同的部分都使用相同的图号,附图中未绘示或描述的实现方式,为所属技术领域中普通技术人员所知的形式。另外,实施例中提到的方向用语,例如“上”、“下”、“顶”、“底”、“左”、“右”、“前”、“后”等,仅是参考附图的方向,并非用来限制本实
用新型的保护范围。
21.如图1~3所示,本实施例的—种便携式电梯门锁啮合深度测量装置,包括相对设置的第一测量机构1和第二测量机构2,第一测量机构1包括第一固定件11和第二固定件12,第一固定件11垂直设置在第二固定件12上,第二固定件12的两端分别一体成型有第一量爪121和第二量爪122,第一量爪121和第二量爪122处于同一水平线上;第二固定件12 的表面设置有气泡水平仪16,气泡水平仪16可以粘连在第二固定件12的表面或者镶嵌在第二固定件12开设的凹槽中,在本实施例中,气泡水平仪16镶嵌在第二固定件12的上表面开设的凹槽中。
22.第二固定件12的上表面设置有两个圆筒13,每个圆筒13内滑动连接有圆形螺母15,圆形螺母15端部的直径大于圆筒13的内径,每个圆形螺母15螺纹连接有连接杆14,第二固定件12的两端开设有与连接杆14相对应的通孔123,连接杆14的下端从第二固定件12 的通孔123滑动的穿出。
23.第二测量机构2包括第三固定件21,第三固定件21的两端分别开设有螺纹孔213,每个连接杆14的下端通过螺纹孔213与第三固定件21螺纹连接;第三固定件21的两端分别一体成型有第三量爪211和第四量爪212,第三量爪211和第四量爪212处于同一水平线上,第三量爪211和第一量爪121互相平行且不在一条垂直线上,第四量爪212和第二量爪122 互相平行且不在一条垂直线上。
24.第一固定件11螺栓连接有固定块3,固定块3上设置有位移传感器31,位移传感器31 电连接有检测仪,固定块3内滑动连接有游标尺4,游标尺4上设置有刻度线,游标尺4的下端与第三固定件21螺栓连接。
25.本实用新型的使用方法如下:
26.首先组装本装置,将固定块3与第一测量机构1的第一固定件11利用螺栓固定连接,再分别将两个连接杆14的一端与第三固定件21的螺纹孔213螺纹连接,接着将游标尺4的一端与第三固定件21利用螺栓固定连接,然后将游标尺4的另一端从固定块3穿出,同时将连接杆14的另一端穿过通孔123,从圆筒13穿出,再将连接杆14的顶端螺纹连接圆形螺母15,最后将已经与检测仪连接的位移传感器31设置在固定块3上。
27.当需要对电梯门锁进行安全检测时,即需要测量门锁触点闭合瞬间锁钩与门锁固定件的啮合深度时,首先将第一测量机构1的下表面与电梯门锁固定件的上表面贴合,再上下移动调整第二测量机构2,使得锁钩放置在第一测量机构1和第二测量机构2之间,并且锁钩的钩尖与第二测量机构2的上表面相抵触。当第二测量机构2受到锁钩上下摆动的影响而上下移动时,由于第二测量机构2与连接杆14固定连接,故第二测量机构2会顺着垂直方向上下移动,使得第二测量机构2与锁钩的钩尖时刻保持抵触状态;由于游标尺4的下端与第二测量机构2固定连接,第二测量机构2上下移动同时带动游标尺4上下移动。
28.当门锁触点闭合时,锁钩向下摆动从而与电梯固定件啮合,同时第二测量机构2和游标尺4随着锁钩摆动而向下移动,当锁钩与电梯固定件完成啮合停止摆动,游标尺向下移动停止的位置也会确定,通过位移传感器测量门锁触点闭合时游标尺的位移值,并将数据传递给检测仪,检测仪显示的数值即为电梯门锁装置啮合深度的具体数值,可直接进行判断电梯门锁装置是否符合安全标准。
29.当位移传感器31出现问题无法正常运行时,人们可直接读取第一测量机构1的底
面在游标尺41的刻度,从而可得到电梯门锁装置啮合深度的具体数值。
30.以上对本实用新型提供的—种便携式电梯门锁啮合深度测量装置进行了详细介绍。具体实施例的说明只是用于帮助理解本实用新型的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1