一种钢网架支座螺栓球球心高程定位装置的制作方法
1.本实用新型属于工程测量技术领域,特别涉及一种钢网架支座螺栓球球心高程定位装置。
背景技术:
2.钢网架结构作为一种新兴的建筑工艺,在一些需要超大空间的建筑物中得到了广泛的应用。根据《gb50205-2001钢结构工程施工质量验收规范》的规定,钢网架结构总拼完成后及屋面工程完成后应分别测量其挠度值,且所测的扰度值不应超过相应设计值的1.15倍。钢网架结构挠度测量属于钢结构分部(子部分)有关安全及功能的检测和见证检测项目。在检测钢网架结构挠度时,通常以实测的网架支撑立柱上的支座螺栓球球心的高程为高程基准,计算轴线上各下弦螺栓球球心的沉降量以及钢网架结构的挠度。故在检测挠度之前,先应检测网架支撑立柱上的支座螺栓球球心的高程,其值应符合gb50205-2001的规定。
3.但是现有的球心高程定位装置在对钢网架支座螺栓球球心定位时,需要对定位装置进行手动调平,才能进行球心定位,而采用手动方式进行调平时,调节的精确度低,且费时费力、工作效率极低。
技术实现要素:
4.为了解决上述问题,本实用新型提供了一种钢网架支座螺栓球球心高程定位装置,可以自动调节水平角度,提高定位精度及工作效率。
5.为此,本实用新型的技术方案是:一种钢网架支座螺栓球球心高程定位装置,其特征在于:包括支撑板,支撑板上方设有定位机构,下方设有调平机构;所述调平机构包括上三角基座和下三角基座,上三角基座与下三角基座之间设有多个可伸缩的连接杆;所述下三角基座上设有多个舵机,舵机上的舵片铰接一传动臂,传动臂与连接杆相连,带动连接杆伸缩;上三角基座底部设有电子水平测量仪,下三角基座上设有控制器,控制器接收电子水平测量仪的测量数据,并控制舵机上舵片的转动角度;所述定位机构包括水平设置的丝杆和与之配合的滑块,滑块上固定有竖直设置的套管及支杆,支杆置于套管内,通过定位螺栓固定,支杆侧面设有水平设置的两个定位杆。
6.优选地,所述上三角基座与下三角基座均为三角形结构,连接杆设置在三个顶角处;所述连接杆包括第一传动杆和第二传动杆,第一传动杆与上三角基座的三个顶角铰接,第二传动杆与下三角基座的三个顶角铰接,第一传动杆和第二传动杆转动连接;传动臂一端与第二传动杆铰接,另一端与舵机上的舵片铰接。
7.优选地,所述支杆上设有一标记孔,标记孔位于两个定位杆中间,标记孔内安装一标记笔,标记笔可在标记孔内水平移动,标记笔与定位杆互相平行。
8.优选地,所述定位杆远离支杆的一端设有容纳室,容纳室内设有可旋转的滚珠。
9.优选地,定位机构还包括一底座,底座固定在支撑板上,丝杆置于底座内,丝杆端
部设有一手柄。
10.使用时,先自动调平。电子水平测量仪对支撑板的倾斜度进行测量,并将测量数据发送至控制器,控制器可以根据测量的数据对相应舵机发出反馈信号,相应舵机接收的反馈信号后使得舵片转动指定的角度,舵片转动可以带动传动臂运动,从而带动第二传动杆、第一传动杆运动,调整上三角基座的高度,通过三个舵机的配合,可以将上三角基座调节至水平状态,进而使得支撑板处于水平状态。
11.自动调平后,开始对螺栓球的球心进行定位。旋转丝杆,丝杆上的滑块以及套管在水平方向上移动,此时套管侧面的定位螺栓并没有锁紧,支杆可在套管内移动。在套管移动时,位于上方的定位杆最先与螺栓球接触,而随着套管的继续移动,上方定位杆的滚珠与螺栓球之间产生摩擦作用力,带动定位杆向上移动,直到两个定位杆上的滚珠均与螺栓球的表面接触,此时停止移动套管,然后转动定位螺栓,对支杆的位置进行锁紧。最后推动标记笔,使得标记笔在螺栓球上进行标记点,此记号点为螺栓球的球心且平行于水平面的切面上的一个点,通过重复上述操作可以在螺栓球表面找到三个相切接触点,将三个接触点相连,连线即是过球心的水平面与螺栓球的切线,测量切线高程,可精确测得螺栓球球心的高程。
12.本实用新型利用电子水平测量仪来测量支撑板的水平度,控制器根据接收到的水平数据来控制舵机上舵片的转动角度,从而通过传动臂带动可伸缩的连接杆运动,连接杆设置在三角基座的三个顶点上,通过三个舵机的配合,可以将支撑板自动调整至水平状态,无需人工对支撑板的水平角度进行调节,保障了定位机构的定位精度,同时提高了工作效率。
附图说明
13.以下结合附图和本实用新型的实施方式来作进一步详细说明
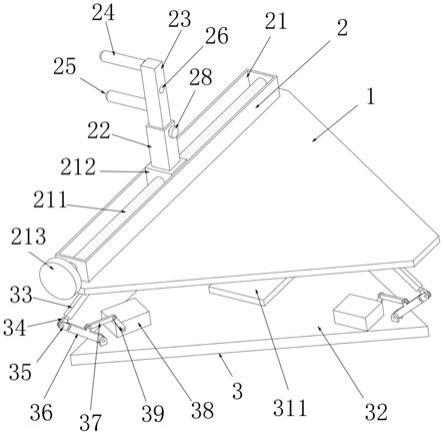
14.图1为本实用新型的结构示意图;
15.图2为本实用新型的工作状态图。
16.附图标记:1、支撑板;2、定位机构;21、底座;211、丝杆;212、滑块;213、手柄;22、套管;23、支杆;24、定位杆;25、滚珠;26、标记孔;27、标记笔;28、定位螺栓;3、自动调平机构;31、上三角基座;32、下三角基座;33、第一传动杆;34、第一连接件;35、第二连接件;36、第二传动杆;37、传动臂;38、舵机;39、舵片;310、电子水平测量仪;311、控制器;4、螺栓球;5、过球心的水平面与螺栓球的切线。
具体实施方式
17.参见附图。本实施例所述的定位装置,包括支撑板1,支撑板1的上方设置有定位机构2,支撑板1的下方设置有自动调平机构3,设置的自动调平机构3可以对支撑板1进行自动调平。
18.所述自动调平机构3包括上三角基座31,上三角基座31与支撑板1固定连接,上三角基座31的下方设有下三角基座32,下三角基座32的下方开设有螺纹孔,此螺纹孔用于和外界的支撑装置连接,上三角基座31下方的三个顶角处均铰接有第一传动杆33,第一传动杆33的下端转动连接有第一连接件34,第一连接件34的下端铰接有第二连接件35,第二连
接件35的下端转动连接有第二传动杆36,三个第二传动杆36的下端与分别与下三角基座32的上侧的三个顶角铰接,第二传动杆36的侧壁铰接有传动臂37,传动臂37远离第二传动杆36一端设有舵机38,传动臂37与舵机38的舵片39铰接,舵机38与下三角基座32的上侧固定连接,上三角基座31的下侧嵌设有电子水平测量仪310,设置的电子水平测量仪310用于检测上三角基座31的倾斜角度,下三角基座32的上侧固定连接有控制器311,电子水平测量仪310、舵机38均与控制器311电连接。控制器311可与计算机相连,可设置控制数据。
19.控制器311接收电子水平测量仪310测量的数据,控制器311可以根据测量的数据对舵机38发出反馈信号,舵机38接收的反馈信号后使得舵片39转动指定的角度,舵片39转动可以带动传动臂37运动,传动臂37带动第二传动杆36、第一传动杆33运动,通过三个舵机38的配合可以将上三角基座31调节至水平状态,进而使得支撑板1处于水平状态。
20.为了便于对螺栓球4球心进行定位,定位机构2包括底座21,底座21与支撑板1固定连接,底座内设有水平设置的丝杆211,滑块212的上端与套管22固定连接,于自身滑动方向贯穿插设在丝杆211上,且与其滑动连接,丝杆211的两端均与底座21的内侧转动连接,丝杆211一端贯穿底座21且位于底座21的外部,并固定连接一手柄213,使得转动丝杆211更加方便。转动丝杆211可以带动滑块212在底座21内滑动,滑块212滑动可以带动套管22在水平方向移动,移动精度高,避免了多次对套管22的位置进行调节,从而便于该装置准确的定位螺栓球4球心。
21.套管22为矩形管,套管22的轴线垂直于支撑板1,套管22的上端插设有支杆23且与其滑动连接,套管22的侧壁贯穿插设有定位螺栓28且与其螺纹连接,支杆23竖直设置一侧固定连接有两个平行设置的定位杆24,且定位杆24的轴线垂直于支杆23的轴线,定位杆24远离支杆23的一端设有容纳室,容纳室为多半球形,容纳室内设有滚珠25,滚珠25与容纳室贴合设置,且滚珠25可以在容纳室内滚动,支杆23上开设有标记孔26,且标记孔26位于两个定位杆24的中位处,标记孔26插设有标记笔27且与其滑动连接。
22.使用时,自动调平机构3可以对支撑板1进行自动调平,电子水平测量仪310用于检测上三角基座31的倾斜角度,控制器311对测量的数据进行接收,然后控制器311根据测量的数据对舵机38发出反馈信号,舵机38接收的反馈信号后使得舵片39转动指定的角度,舵片39转动可以带动传动臂37运动,传动臂37运动可以带动第二传动杆36运动,第二传动杆36运动通过第一连接件34与第二连接件35带动第一传动杆33运动,通过三个舵机38的配合可以将上三角基座31调节至水平状态,进而使得支撑板1处于水平状态,当调节完成之后,即可对螺栓球4的球心进行定位。
23.在对螺栓球4球心进行定位时,通过配套的丝杆和滑块可以带动套管22在水平方向运动,在套管22运动时,位于上方的定位杆24上的滚珠25先与螺栓球4接触,随着套管22的继续运动,在滚珠25与螺栓球4的摩擦作用力下,可以带动支杆23、定位杆24向上运动,直到两个定位杆24上的滚珠25均与螺栓球4的表面接触即可停止移动套管22,然后转动定位螺栓28对支杆23的位置进行锁紧,最后推动标记笔27使得标记笔27在螺栓球4上进行标记点,此记号点为螺栓球4球心且平行于水平面的切面上的一个点,通过重复上述操作可以在螺栓球4表面找到三个相切接触点,将三个接触点相连,连线即是过球心的水平面与螺栓球的切线5,测量切线高程,可精确测得螺栓球4球心的高程。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1