圆筒口部几何误差的检测装置的制作方法
1.本实用新型属于产品几何误差检测与评估领域,更具体地,涉及一种圆筒口部几何误差的检测装置。
背景技术:
2.薄壁圆筒是一种厚径比很小的一种零件,能够以较小的重量承载相当大的载荷,为了确保薄壁圆筒容器的密封性,口部附近位置往往设计有环槽结构,用以安装密封圈。该环槽的尺寸与几何误差对圆筒容器的密封性能有着重要影响,需要严格控制。
3.现有的测量方法主要是三坐标测量机测量法与视觉测量法。三坐标测量机测量的结果可靠,但由于薄壁圆筒的壁厚有限,使得环槽结构的深度小,使用三坐标测量机测量与评估易撞针,测量效率较低。视觉测量方法的效率高,但由于加工能力的限制,槽的边缘必然存在小圆角,这使得使用图像测量的方式存在边缘识别的问题,测量的可靠性较低。综上所述,现有的测量方式难以满足可靠且高效的测量需求。
4.公开于本实用新型背景技术部分的信息仅仅旨在加深对本实用新型的一般背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
技术实现要素:
5.本实用新型的目的是提供一种圆筒口部几何误差的检测装置,该圆筒口部几何误差的检测装置检测更为准确,可靠性高。
6.为了实现上述目的,本实用新型的第一方面提供了一种圆筒口部几何误差的检测装置,该圆筒口部几何误差的检测装置包括:
7.支架,用于设置在待检测圆筒内;
8.第一线激光传感器,设置在所述支架上;
9.第二线激光传感器,设置在所述支架上,所述第二线激光传感器与所述第一线激光传感器之间的距离为所述待检测圆筒的环槽槽宽的2至3倍;
10.转台,所述待检测圆筒用于设置在所述转台上。
11.在上述任一技术方案中,优选地,所述支架上设置有第一安装面和第二安装面,所述第一安装面和所述第二安装面相对于所述转台的端面倾斜设置,所述第一线激光传感器设置在所述第一安装面上,所述第二线激光传感器设置在所述第二安装面上;
12.其中,所述第一安装面与所述端面的夹具为40
°
至60
°
,所述第二安装面与所述端面的夹具为40
°
至60
°
。
13.在上述任一技术方案中,优选地,所述转台包括:
14.工件转盘,所述工件转盘用于设置所述待检测圆筒;
15.转台电机,所述转台电机的输出端连接于所述工件转盘;
16.电机安装座和转台电机基座,所述电机安装座设置在所述转台电机基座上,所述
转台电机设置在所述电机安装座上。
17.在上述任一技术方案中,优选地,还包括:
18.机械臂;
19.夹持件,设置在所述机械臂的一端,所述支架的一端连接于所述夹持件;
20.底座,所述机械臂的一另端连接于所述底座。
21.本实用新型的有益效果在于:本实用新型提供的圆筒口部几何误差的检测装置,在使用过程中,待检测圆筒包括环槽和台阶面,环槽开设在待检测圆筒的内壁上,台阶面设置在待检测圆筒的内壁上,待检测圆筒位于环槽的区域为第一检测段,位于台阶面与环槽之间的区域为第二检测段,在检测过程中,可以将待检测圆筒设置在转台上,将支架设置在待检测圆筒内,第一线激光传感器即可对第一检测段进行检测,第二线激光传感器即可对第二检测段进行检测,通过第二线激光传感器与第一线激光传感器之间的距离为待检测圆筒的环槽槽宽的2至3倍,能够确保本技术提供的圆筒口部几何误差的检测装置可以对第一检测段和第二检测段进行检测,进一步地,在基于第二线激光传感器与第一线激光传感器之间的关系建立矩阵,将第二线激光传感器的检测结果校正拟合到第一线激光传感器的检测结果中,即可对圆筒口部几何误差进行准确判断,大大提高了检查精度和检测可靠性。
22.本实用新型的其它特征和优点将在随后具体实施方式部分予以详细说明。
附图说明
23.通过结合附图对本实用新型示例性实施方式进行更详细的描述,本实用新型的上述以及其它目的、特征和优势将变得更加明显,其中,在本实用新型示例性实施方式中,相同的参考标号通常代表相同部件。
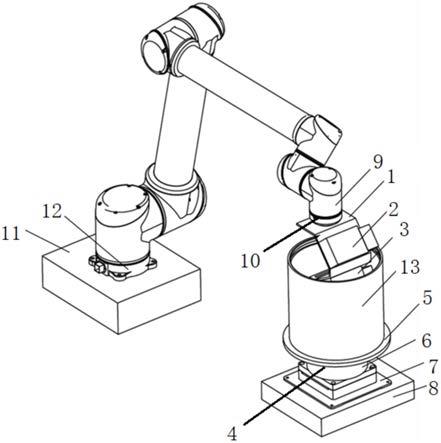
24.图1示出了根据本实用新型的一个实施例的圆筒口部几何误差的检测装置的示意性结构图。
25.图2示出了根据本实用新型的一个实施例的圆筒口部几何误差的检测装置的示意性结构图。
26.图3示出了根据本实用新型的一个实施例的圆筒口部几何误差的检测方法示意性步骤流程图。
27.附图标记说明:
28.1、支架;2、第一线激光传感器;3、第二线激光传感器;4、转台;5、工件转盘;6、转台电机;7、电机安装座;8、转台电机基座;9、机械臂;10、夹持件;11、底座;12、机械臂基座;13、待检测圆筒。
具体实施方式
29.下面将更详细地描述本实用新型的优选实施方式。虽然以下描述了本实用新型的优选实施方式,然而应该理解,可以以各种形式实现本实用新型而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了使本实用新型更加透彻和完整,并且能够将本实用新型的范围完整地传达给本领域的技术人员。
30.图1示出了根据本实用新型的一个实施例的圆筒口部几何误差的检测装置的示意性结构图。图2示出了根据本实用新型的一个实施例的圆筒口部几何误差的检测装置的示
意性结构图。图3示出了根据本实用新型的一个实施例的圆筒口部几何误差的检测方法示意性步骤流程图。
31.如图1所示,本实用新型提供了一种圆筒口部几何误差的检测装置,该圆筒口部几何误差的检测装置包括:支架1,用于设置在待检测圆筒13内;第一线激光传感器2,设置在支架1上;第二线激光传感器3,设置在支架1上,第二线激光传感器3与第一线激光传感器2之间的距离为待检测圆筒13的环槽槽宽的2至3倍;转台4,待检测圆筒13用于设置在转台4上。
32.本实用新型提供的圆筒口部几何误差的检测装置,在使用过程中,待检测圆筒13包括环槽和台阶面,环槽开设在待检测圆筒13的内壁上,台阶面设置在待检测圆筒13的内壁上,待检测圆筒13位于环槽的区域为第一检测段,位于台阶面与环槽之间的区域为第二检测段,在检测过程中,可以将待检测圆筒13设置在转台4上,将支架1设置在待检测圆筒13内,第一线激光传感器2即可对第一检测段进行检测,第二线激光传感器3即可对第二检测段进行检测,通过第二线激光传感器3与第一线激光传感器2之间的距离为待检测圆筒13的环槽槽宽的2至3倍,能够确保本技术提供的圆筒口部几何误差的检测装置可以对第一检测段和第二检测段进行检测,进一步地,在基于第二线激光传感器3与第一线激光传感器2之间的关系建立矩阵,将第二线激光传感器3的检测结果校正拟合到第一线激光传感器2的检测结果中,即可对圆筒口部几何误差进行准确判断,大大提高了检查精度和检测可靠性。
33.可以理解的是,通过转台4的设置便于带动待检测圆筒13转动,便于第一线激光传感器2和第二线激光传感器3采集待检测圆筒13内壁周侧的数据,能够提高检测精度,且便于检测的顺利进行。
34.作为优选技术方案,支架1上设置有第一安装面和第二安装面,第一安装面和第二安装面相对于转台4的端面倾斜设置,第一线激光传感器2设置在第一安装面上,第二线激光传感器3设置在第二安装面上;其中,第一安装面与端面的夹具为40
°
至60
°
,第二安装面与端面的夹具为40
°
至60
°
。
35.在该技术方案中,进一步提供了支架1的具体结构,支架1包括了第一安装面和第二安装面,便于第二线激光传感器3与第一线激光传感器2的安装,第一安装面与端面的夹具为40
°
至60
°
,第二安装面与端面的夹具为40
°
至60
°
能够确保第一线激光传感器2能够对第一检测段进行检测,而第二线激光传感器3能够对第二检测段进行检测。
36.作为优选技术方案,转台4包括:工件转盘5,工件转盘5用于设置待检测圆筒13;转台电机6,转台电机6的输出端连接于工件转盘5;电机安装座7和转台电机基座8,电机安装座7设置在转台电机基座8上,转台电机6设置在电机安装座7上。
37.在该技术方案中,转台4包括:工件转盘5、转台电机6、电机安装座7和转台电机基座8,通过转台电机6的设置便于带动工件转盘5转动,通过转台电机基座8的设置,为转台电机6提供了安装位置。
38.作为优选技术方案,圆筒口部几何误差的检测装置还包括:机械臂9;夹持件10,设置在机械臂9的一端,支架1的一端连接于夹持件10;底座11,机械臂9的一另端连接于底座11。
39.在该技术方案中,圆筒口部几何误差的检测装置还包括了机械臂9和夹持件10,通过机械臂9的设置能够带动支架1移动,通过夹持件10的设置便于固定支架1,通过底座11的
设置便于机械臂9的安装。
40.在一些示例中,还可以包括机械臂基座12,机械臂9的一端连接于机械臂基座12,而后机械臂基座12再连接到底座11上。
41.本实用新型公开了一种圆筒口部几何误差的检测装置,可用于评估圆筒口部环槽要素的尺寸、形状、方向和位置误差。支架1,第一线激光传感器2和第二线激光传感器3呈一定的角度安装在线激光支架1上,可相互测量对方的测量盲区,实现环槽截面形貌的扫描;转台4由工件转盘5、转台电机6、电机安装座7与转台电机基座8组成,工件转盘5上端面与转台4基座平行,待测薄壁圆筒安装在工件转盘5上,转台电机6可带动工件转盘5进而带动薄壁圆筒旋转,配合第一线激光传感器2和第二线激光传感器3可实现环槽在周向上的完整测量;支架1设置在机械臂9的末端,可实现测量单元的移动与粗定位。
42.如图2和图3所示,根据本实用新型的第二方面提供了一种圆筒口部几何误差的检测方法,应用于上述任一技术方案的圆筒口部几何误差的检测装置,待检测圆筒包括环槽和台阶面,环槽开设在待检测圆筒的内壁上,台阶面设置在待检测圆筒的内壁上,待检测圆筒位于环槽的区域为第一检测段,位于台阶面与环槽之间的区域为第二检测段,检测方法包括:
43.步骤101:将待检测圆筒设置在转台上;
44.步骤102:将支架设置在待检测圆筒内;
45.步骤103:通过转台带动待检测圆筒转动;
46.步骤104:通过第一线激光传感器和第二线激光传感器采集要素集;
47.步骤105:通过要素集,确定待检测圆筒的口部几何误差。
48.如图2所示,其中附图2中abc三个面即为第一检测段,cdef即为第二检测段,hg即为台阶面。
49.本技术实施例提供的圆筒口部几何误差的检测方法,将支架设置在检测圆筒内,再通过转台带动待检测圆筒转动,即可第一线激光传感器即可对第一检测段进行检测,第二线激光传感器即可对第二检测段进行检测,如此设置可以共同采集要素集,保障了要素集的丰富性,再基于要素集即可,确定待检测圆筒的口部几何误差。
50.作为优选技术方案,通过转台带动待检测圆筒转动的步骤包括:定义转台的端面的法向为z轴,转台的转动方向为θ方向,待检测圆筒的半径方向为r方向;控制转台沿θ方向以第一角速度进行转动。
51.作为优选技术方案,通过第一线激光传感器和第二线激光传感器采集要素集的步骤包括:设定第一检测周期;每经过一个检测周期,通过第一线激光传感器,采集第一检测段的端面信息作为第一点集,采集第一检测段的内壁信息作为第二点集,采集第二检测段的端面信息作为第三点集,采集第二检测段的内壁信息作为第四点集;每经过一个检测周期,通过第二线激光传感器,采集环槽的上端面信息作为第五点集,采集环槽的内壁信息作为第六点集。
52.如图2所示,对第一检测段的端面即为附图2中a处标识的面,第一点集可以标记为pa,第一检测段的内壁即为附图2中b处所标识的面,第二点集可以标记为pb,环槽的上端面即为附图2中c处标识的面,第五点集可以标记为pc,环槽的内壁即为附图2中d处所标识的面第六点集可以标记为pd,第二检测段的端面即为附图2中e处所标识的面第三点集可以标
记为pe,第二检测段的内壁为附图2中f处所标识的面,第四点集可以标记为pf。
53.作为优选技术方案,通过要素集,确定待检测圆筒的口部几何误差的步骤包括:获取第一线激光传感器和第二激光传感器之间的距离关系,第一线激光传感器和第二激光传感器之间安装角度关系;基于距离关系和安装角度关系,构建第一线激光传感器和第二激光传感器之间的关系矩阵;将第五点集代入到关系矩阵内,获取与第一点集、第二点集、第三点集、第四点集处于同一坐标系内的校正第五点集;将第六点集代入到关系矩阵,获取与第一点集、第二点集、第三点集、第四点集处于同一坐标系内的校正第六点集;基于第一点集、第二点集、第三点集、第四点集、校正第五点集和校正第六点集,确定待检测圆筒的口部几何误差。
54.根据线激光传感器支架的实测几何尺寸与线激光传感器之间的安装误差,可计算出两线个激光传感器之间的位置关系,可通过齐次矩阵表示为
[0055][0056]
其中,p1表示第一线激光传感器测得的点,p2表示第二线激光传感器测得的点,t0、r0分别表示两者的位置关系矩阵,l0表示线激光传感器之间的距离,θ0表示线激光传感器之间的角度。
[0057]
将第五点集pc可代入带上述矩阵即可获取到校正第五点集pc′
,将第六点集pd可代入带上述矩阵即可获取到校正第六点集pd′
。
[0058]
在基于第一点集pa、第二点集pb,校正第五点集pc′
、校正第六点集pd′
、第三点集pe和第四点集pf。
[0059]
作为优选技术方案,基于第一点集、第二点集、第三点集、第四点集、校正第五点集和校正第六点集,确定待检测圆筒的口部几何误差的步骤包括:基于第一点集、校正第五点集和第三点集,确定待检测圆筒口部的z轴误差;基于第二点集、校正第六点集和第四点集,确定待检测圆筒口部的r方向误差。
[0060]
作为优选技术方案,基于第一点集、第二点集、第三点集、第四点集、校正第五点集和校正第六点集,确定待检测圆筒的口部几何误差的步骤还包括:基于校正第五点集和第一点集,确定待检测圆筒口部的平行度误差;基于第一点集、校正第六点集和第四点集,确定待检测圆筒口部的垂直度误差;基于校正第五点集和第四点集,确定待检测圆筒的环槽上端面和下端面与z轴方向的误差。
[0061]
使用最小二乘法拟合平面pa,pc′
,pe,找出沿z方向的最大偏离点与沿-z方向的最大偏离点,并计算它们在z方向的差值,该差值即为待测平面的形状误差;使用最小二乘法拟合圆柱面pb,pd′
,pf,找出圆柱外侧的最大偏离点与圆柱内侧的最大偏离点,并计算它们在r方向的差值,该差值极为待测圆柱面的形状误差。
[0062]
计算得到的拟合平面,以要素a的平面为基准,通过计算平面pc′
,pe与pa的角度,评估待测平面的平行度误差;通过计算圆柱面pb,pd′
,pf轴线与pa的角度,评估待测圆柱面的垂直度误差。
[0063]
计算pc′
与pe之间平均距离,得到待测的环槽宽度;分别计算pa与pc′
,pe之间的平均距离,可用于评估pc′
与pe在z方向的位置误差。
[0064]
以上已经描述了本实用新型的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1