一种高精度长度角度传感器的制作方法
1.本实用新型涉及到机械工程设备技术领域,尤其涉及一种高精度长度角度传感器。
背景技术:
2.目前,对于带伸缩臂的工程设备,为了保证安全和该工程设备完成作业均需要很多角度传感器,而检测机械臂实时长度数据以及检测机械臂与水平面的倾角数据的长度角度传感器是不可或缺的。现有的长度角度传感器普遍采用卷扬结构加角度传感器的方式来实现测量,其收线过程主要依靠卷簧机构,存在机械过载断线或无法收线的风险,当绕线叠绳时使得存在长度测量误差较大,而现有的长度角度传感器结构在长时间工作后,其卷环很容易失去原有弹性,进而导致卷扬结构中的钢丝绳松弛,使得该传感器的测试精度越来越差。
3.鉴于此,如何设计一种测量精度高且测量数据可靠的长度角度传感器是本技术领域技术人员需要解决的技术问题。
技术实现要素:
4.本实用新型的目的是提供一种高精度长度角度传感器,通过设置磁感应模块和磁铁匹配构成的角度传感器以及设于机械臂上位移传感器的双冗余长度测量方式,有效保证了测量数据的精度和可靠性,同时利用驱动机构和拉力传感器实时收放钢丝绳和测量钢丝绳的拉力强度,保证了钢丝绳的自动有序收放线,使得该长度角度传感器能够适用于各种恶劣工况。
5.为解决上述技术问题,本实用新型提供一种高精度长度角度传感器,包括设于机械臂上的卷线装置、电路板、拉力传感器和位移传感器,其中:
6.所述卷线装置包括驱动机构、线轴和钢丝绳,钢丝绳缠绕于线轴上,且钢丝绳的一端固定在线轴上,钢丝绳的另一端可拆卸固定在机械臂的前端,驱动机构的驱动端与线轴的一端连接用于控制钢丝绳的收放绳,线轴的另一端与电路板相对设置并于该端端部设置有磁铁;
7.所述电路板上设有电源模块,以及分别与电源模块连接的磁感应模块、多圈计数模块、动态倾角检测模块、mcu模块、第一通信模块和驱动模块,磁感应模块和多圈计数模块均与磁铁相对设置且可对应匹配以用于检测线轴的转动角度和转动圈数,驱动模块与驱动机构连接以用于控制驱动机构的运行,mcu模块分别与磁感应模块、多圈计数模块和动态倾角检测模块连接以用于接收检测数据,第一通信模块分别与磁感应模块、多圈计数模块、动态倾角检测模块、mcu模块和驱动模块连接以实现数据互通;
8.所述拉力传感器分别与钢丝绳和mcu模块连接以用于检测钢丝绳的拉力强度并将所检测的钢丝绳拉力强度数据传输给mcu模块进行处理;
9.所述位移传感器固定设于机械臂上以用于检测机械臂的伸出长度,且位移传感器
与mcu模块连接以用于将所检测的机械臂伸出长度数据传输给mcu模块进行处理。
10.优选地,所述驱动机构与线轴之间设有减速装置,驱动机构的输出轴与减速装置啮合连接,线轴与减速装置耦合连接。
11.优选地,所述线轴的底部中心设有一个用于放置磁铁的凹槽。
12.优选地,还包括固定设于机械臂上的壳体,壳体包括匹配密封连接的上盖和下盖,线轴和电路板均位于壳体内。
13.优选地,所述拉力传感器和位移传感器中均设有与第一通信模块相匹配的第二通信模块,拉力传感器和位移传感器通过第一通信模块和第二通信模块匹配连接实现数据互通。
14.优选地,所述第一通信模块和第二通信模块均为有线通信模块。
15.优选地,所述驱动机构为驱动电机。
16.优选地,所述位移传感器为激光位移传感器。
17.优选地,所述卷线装置还包括与线轴并列设置的卷线滑轮和轴,卷线滑轮通过轴与壳体固定连接,,钢丝绳可滑动的绕设于卷线滑轮上。
18.与现有技术比较,本实用新型具有如下有益技术效果:
19.(1)本实用新型中通过设置磁感应模块和磁铁匹配构成的角度传感器以及设于机械臂上位移传感器的双冗余长度测量方式,有效保证了测量数据的精度和可靠性;同时利用驱动机构控制钢丝绳的收放线以及利用拉力传感器实时测量钢丝绳的拉力强度,保证了钢丝绳的自动有序收放线,使得该长度角度传感器能够适用于各种恶劣工况。
20.(2)本实用新型中通过在驱动机构与线轴之间设置一个减速装置,进而降低了驱动机构的输出转速,增加了驱动机构的输出扭矩,从而能够有效增加驱动机构的作用力。
21.(3)本实用新型中通过设置壳体对各个部件进行保护,进而能够延长部件的使用寿命,一定程度上也提高了长度角度传感器测量结果的精度;
22.(4)本实用新型中采用有线通信方式进行数据传输,保证了长度角度传感器测量结果的稳定性,提高了测量效率。
附图说明
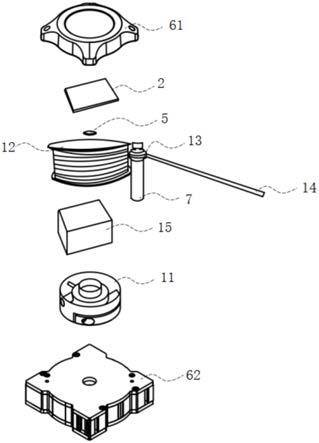
23.图1是本实用新型一种高精度长度角度传感器的结构分解图,
24.图2是本实用新型中安装在机械臂上的高精度长度角度传感器的结构示意图,
25.图3是本实用新型中电路板的结构示意图,
26.图4是本实用新型一种高精度长度角度传感器的安装示意图。
27.图中:11.驱动机构,12.线轴,13.卷线滑轮,14.钢丝绳,2.电路板,21.电源模块,22.磁感应模块,23.多圈计数模块,24.动态倾角检测模块,25.mcu模块,26.第一通信模块,27.驱动模块,3.拉力传感器,4.位移传感器,5.磁铁,6.壳体,61.上盖,62.下盖7.轴。
具体实施方式
28.为了使本技术领域的人员更好地理解本实用新型的技术方案,下面结合附图对本实用新型作进一步的详细说明。
29.需要说明的是,本实用新型中,以图1为例,垂直纸面向上为上,垂直纸面向下为
下,其中,工程设备机械臂远离工程设备的一端为前端,机械臂与工程设备连接的一端为后端。
30.如图1
‑
图4所示,本实施例提供了一种高精度长度角度传感器,包括设于机械臂上的卷线装置、电路板2、拉力传感器3和位移传感器4,其中:
31.所述卷线装置包括驱动机构11、线轴12和钢丝绳14,钢丝绳14缠绕于线轴12上,且钢丝绳14的一端固定在线轴12上,钢丝绳14的另一端可拆卸固定在机械臂的前端,驱动机构11的驱动端与线轴12的一端连接用于控制钢丝绳14的收放绳,线轴12的另一端与电路板2相对设置并于该端端部设置有磁铁5;
32.所述电路板2上设有电源模块21,以及分别与电源模块21连接的磁感应模块22、多圈计数模块23、动态倾角检测模块24、mcu模块25、第一通信模块26和驱动模块27,磁感应模块22和多圈计数模块23均与磁铁5相对设置且可对应匹配以用于检测线轴12的转动角度和转动圈数,驱动模块27与驱动机构11连接以用于控制驱动机构11的运行,mcu模块25分别与磁感应模块22、多圈计数模块23和动态倾角检测模块24连接以用于接收检测数据,第一通信模块26分别与磁感应模块22、多圈计数模块23、动态倾角检测模块24、mcu模块25和驱动模块27连接以实现数据互通;
33.所述拉力传感器3分别与钢丝绳14和mcu模块25连接以用于检测钢丝绳14的拉力强度并将所检测的钢丝绳14拉力强度数据传输给mcu模块25进行处理;
34.所述位移传感器4固定设于机械臂上以用于检测机械臂的伸出长度,且位移传感器4与mcu模块25连接以用于将所检测的机械臂伸出长度数据传输给mcu模块25进行处理。
35.本实施例中,所述驱动机构11为驱动电机,位移传感器4为激光位移传感器,线轴12的底部中心设有一个凹槽,磁铁5放置在凹槽内并与电路板2上的磁感应模块22和多圈计数模块23相对应以用于检测线轴12的转动角度和转动圈数,动态倾角检测模块24用于实时检测线轴12相对于水平面的夹角并将所检测的数据传输给mcu模块25,电源模块21为电路板2上的各个模块提供稳定的电源,多圈计数模块23用于检测线轴12的旋转圈数且能够在断电情况下保存线轴12的旋转圈数,并将所检测和保存的数据传输给mcu模块25。
36.本实施例中,在机械臂伸缩工作当中,所述位移传感器4能够直接检测出机械臂的伸缩长度并传输给mcu模块25,所述电路板2与磁铁5相匹配能够检测出线轴12的旋转角度和旋转圈数,通过mcu模块25处理间接测量出机械臂的伸缩长度,进而形成测量双冗余设计,使得机械臂伸缩长度的测量数据更加精准可靠,同时,还可以利用动态倾角检测模块24实时检测线轴12相对于水平面的夹角并传输给mcu模块25进行相应处理,进一步保证了测量结果的准确性。而且,在机械臂伸缩过程中,通过驱动模块27控制驱动机构11来驱动线轴12转动,并在线轴12转动过程中,采用拉力传感器3实时检测钢丝绳14的拉力强度,有效保证了线轴12上的钢丝绳14能够稳定有序的收放线,避免了现有技术中机械因过载断线或无法收线,以及钢丝绳松弛的问题。
37.如图1所示,所述驱动机构11与线轴12之间设有减速装置15,驱动机构11的输出轴与减速装置15啮合连接,线轴12与减速装置15耦合连接。
38.本实施例中,在驱动机构11与线轴12之间设置一个减速装置15,进而降低了驱动机构11的输出转速,增加了驱动机构11的输出转矩,从而能够有效保证驱动机构11的作用力。
39.如图1、图4所示,还包括固定设于机械臂上的壳体6,所述壳体6包括匹配密封连接的上盖61和下盖62,线轴12和电路板2均位于壳体6内。本实施例中,所述机械臂上固定设置有壳体6,通过将线轴12和电路板2设置在壳体6内,进而能够对部件进行有效保护,延长部件的使用寿命,同时保证测量结果的准确。在其他实施例中,还可以将驱动机构11也设置在壳体6内进行保护。
40.其中,所述拉力传感器3和位移传感器4中均设有与第一通信模块26相匹配的第二通信模块,拉力传感器3和位移传感器4通过第一通信模块26和第二通信模块匹配连接实现数据互通;所述第一通信模块26和第二通信模块均为有线通信模块。
41.本实施例中,所述第一通信模块26和第二通信模块均设置为有线通信模块,通过有线通信的方式能够有效保证数据传输的稳定可靠,提高了测量效率。
42.如图1所示,所述卷线装置还包括与线轴12并列设置的卷线滑轮13和轴7,卷线滑轮13通过轴7与壳体6固定连接,钢丝绳14可滑动的绕设于卷线滑轮13上。本实施例中,所述卷线滑轮13通过一个可转动的轴7与壳体6固定连接并与线轴12并列设置,进而实现了卷线滑轮13在水平方向上的限位,在钢丝绳14收放线的过程中,通过卷线滑轮13可将钢丝绳14有序的收放在线轴12的固定线槽位置中,从而保证了钢丝绳14的有序收放线。
43.以上对本实用新型所提供的一种高精度长度角度传感器进行了详细介绍。本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1