一种用于采集隧道形变与病害数据的移动平台
1.本实用新型涉及地铁隧道形变与病害检测技术领域,具体为一种用于采集隧道形变与病害数据的移动平台。
背景技术:
2.目前,我国的城市地铁建设正处于大发展时期,越来越多的地铁线路投入运营,地铁已成为城市中最主要的通勤工具。然而,随着地铁长期运营过程中受循环振动、结构材料劣化、服役环境变化等综合因素的影响,地铁隧道结构受力状态会发生变化,结构性能逐步退化,导致多类型病害的发生,危及行车安全。
3.近年来地铁隧道安全维护中出现的人工效率低、作业强度大、窗口时间短、维护成本高、实效性差、统筹能力弱、与运营衔接不够等问题,对隧道安全检测手段提出了更高的要求。目前以智能化诊断以及人工智能等技术为核心的隧道检测技术与装备是解决该难题的有效途径,但该领域长期受到欧美发达国家的技术封锁与垄断,研发具有自主知识产权的隧道安全检测智能装备是我国隧道安全维护发展的必由之路,因此本产品的国内市场份额巨大,产业发展前景广阔。
技术实现要素:
4.本实用新型针对现有技术中的不足,提供一种用于采集隧道形变与病害数据的移动平台,解决了上述背景技术中提出的问题。
5.为实现上述目的,本实用新型采用以下技术方案:
6.一种用于采集隧道形变与病害数据的移动平台,一种可在地铁轨道上移动并采集隧道形变与病害数据的可移动小车,所述移动平台包括可运行于地铁轨道上的底盘;底盘作为结构基础上搭载有动力系统、存储控制系统、三维激光传感系统、视觉传感系统;所述动力系统包括电源、电调、无刷电机、主动轮、从动轮;所述存储控制系统包括主控制器,向三维激光传感系统和视觉传感系统发出控制命令以及信息交互,向动力系统发出动力控制命令,通过串口连接上位机;所述三维激光传感系统包括依次安装的调平底座、z轴伺服电机、三维激光扫描仪;所述视觉传感系统包括安装于支架上的多个相机,以及辅助相机安装的支撑结构和相机底座。
7.为优化上述技术方案,采取的具体措施还包括:
8.进一步地,所述底盘(1)为一种铝合金框架式结构,可安装于地铁轨道上。
9.进一步地,所述电源(201)用于向无刷电机(203)、存储控制系统(3)、三维激光系统(4)、视觉传感系统(5)供电;所述电调(202)用于接收存储控制系统(3)信号,并控制无刷电机(203)转速;所述主动轮(204)安装于底盘(1)前端,并由无刷电机(203)驱动,从动轮(205)安装于底盘(1)后端;所述动力系统(2)除主动轮(204)、从动轮(205)均集合安装于底盘(1)中前部。
10.进一步地,所述存储控制系统(3)的主控制器(301)安装于动力系统(2)上方。
11.进一步地,所述调平底座(401)安装于底座(1)上,所述z轴伺服电机(402)固定于调平底座(401)上;所述三维激光扫描仪(403)安装于z轴伺服电机(402)上。
12.进一步地,所述视觉传感系统(5)的每个相机(501)可以提供自主照明,所述相机(501)安装于支撑结构(502)上,支撑结构(502)可绕y轴旋转,带动相机(501)旋转,支撑结构(502)安装于相机底座(503)上,相机底座(503)与底盘(1)相连。
13.本发明的有益效果是:本实用新型提供了一种用于采集隧道形变与病害数据的移动平台,通过底盘依附于地铁轨道并由动力系统进行驱动,并充分利用已搭载的激光及视觉传感器高精度、高柔性化、低成本等特性,立足先进的人工智能、深度学习、最优化理论,应对公共交通安全维护领域的隧道安全检测需求,包括了隧道病害检测技术、隧道形变分析技术等多种核心内容,打破了国外技术垄断。
附图说明
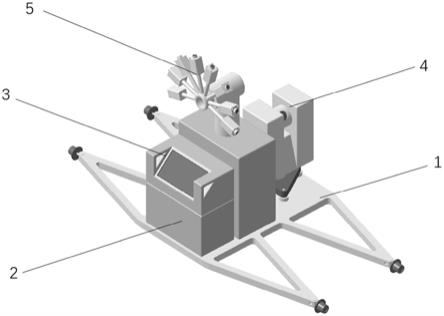
14.图1为本实用新型结构示意图;
15.图2为本实用新型底盘的结构示意图;
16.图3为本实用新型动力系统的结构示意图;
17.图4为本实用新型存储控制系统的结构示意图;
18.图5为本实用新型三维激光传感系统的结构示意图;
19.图6为本实用新型视觉传感系统的结构示意图。
20.图中:1-底盘;2-动力系统;201-电源;202-电调;203-无刷电机;204-主动轮;205-从动轮;3-存储控制系统;301-主控制器;4-三维激光传感系统;401-调平底座;402-z轴伺服电机;403-三维激光扫描仪;5-视觉传感系统;501-相机;502-相机支撑结构;503-相机底座。
具体实施方式
21.现在结合附图对本实用新型作进一步详细的说明。
22.需要注意的是,实用新型中所引用的如“上”、“下”、“左”、“右”、“前”、“后”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
23.参阅图1至图6,本实用新型提供一种技术方案:一种用于采集隧道形变与病害数据的移动平台,所述移动平台包括可安装于地铁轨道上的底盘1;所述底盘1作为结构基础,其上搭载有动力系统2、存储控制系统3、三维激光传感系统4、视觉传感系统5;所述动力系统2包括电源201、电调202、无刷电机203、主动轮204、从动轮205;存储控制系统3包括主控制器301,向三维激光传感系统4和视觉传感系统5发出控制命令以及信息交互,向动力系统2发出动力控制命令,通过串口连接上位机;所述三维激光传感系统4包括依次安装的调平底座401、z轴伺服电机402、三维激光扫描仪403;所述视觉传感系统5包括安装于支架上的8个相机501,相机501安装于相机支撑结构上502。
24.所述动力系统包括由电源201、电调202、无刷电机203、主动轮204、从动轮205组成的动力传动部分;所述电源201对动力系统2、存储控制系统3、三维激光传感系统4、视觉传感系统5进行供电;所述无刷电机203由电源201进行供电,由有线连接至电调202并通过控
制器301控制;所述电源201、电调202均集合成一个部分,安装于底座1中前部;所述主动轮204与无刷电机203相固定,安装于底座1前端;所述从动轮205安装于底座1后端;主动轮和从动轮均包含自适应轴承和车轮。自适应轴承带有转角限制器,可以自适应轨道的转弯,并且不会因为过度旋转而导致车轮脱离轨面。
25.在本实施例中,所述主控制器301为研华公司tpc1251te3be1901-t型号工控一体机,安装于动力系统2上部;主控制器301通过信号线与动力系统中的电调202连接,从而控制无刷电机203动作;主控制器301还通过有线方式连接三维激光传感系统4,读取采集到的隧道形变数据;主控制器301还通过有线连接的方式与视觉传感系统5连接,读取采集到的隧道病害数据;主控制器301装载有触控面板,从而提供可视化交互功能,可以实时查看各个系统状态。
26.所述三维激光传感系统4包含调平底座401、z轴伺服电机402、三维激光扫描仪403。调平底座401通过三个调整旋钮与底盘1连接,可以用来对三维激光扫描仪403的初始状态进行调平;所述z轴伺服电机402可以调整三维激光扫描仪403的转角;所述三维激光扫描仪403的激光发射头可以绕y轴进行320
°
旋转;所述三维激光扫描仪403搭载gps、罗盘、高度计、双轴补偿器等多个传感器。
27.所述视觉传感系统5包括8个相机501,每个相机501可以提供自主照明,所述相机安装于支撑结构502上,支撑结构可绕y轴旋转,支撑结构安装于相机底座503上,相机底座固定于底盘1上。
28.综上所述,该用于采集隧道形变与病害数据的移动平台,针对地铁隧道的竣工验收以及日常运维检测,通过将三维激光扫描仪、视觉传感扫描系统、超高测量系统与移动小车集成,构建形变分析模块、病害检测模块,自主开发研制智能动态移动式隧道检测平台。该平台采用了非接触测量方法,不需要单独设置测量观测点,但在移动测量过程中需尽量避免轨行区内行人、设备等因素造成的遮挡,并需在隧道内壁用粉笔标注扫描时间、区间、环号、里程等信息,以便测量内业数据处理时进行复核确认。
29.以上仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1