一种大比例尺无人机载航磁探测设备的制作方法
1.本实用新型涉及无人机磁力检测设备技术领域,具体涉及一种大比例尺无人机载航磁探测设备。
背景技术:
2.航空磁探就是把灵敏的磁力仪装载在行器上,用于探测磁场变化,主要应用在地质勘探、水下及地下目标探测等领域,是磁力探测必备的手段。但是航空磁探技术的门槛高,成本高,目前还是普遍以传统的地面磁探为主要的磁力探测手段,地面磁探干扰因素多、探测精度很难保证,而且效率很低,现有技术中的航空磁探多采用有人机或固定翼无人机进行探测,在无人机中的探测设备存在探测精度不稳定、不能进行大比例尺作业、飞机磁干扰大、使得航磁探测只能做为普查手段,不能进行详查作业。
技术实现要素:
3.有鉴于此,本实用新型要解决的问题是提供一种探测精度高、稳定性高的大比例尺无人机载航磁探测设备。
4.为解决上述技术问题,本实用新型采用的技术方案是:一种大比例尺无人机载航磁探测设备,包括无人机以及与无人机连接的探测设备,所述探测设备包括氦光泵磁力仪主机以及与氦光泵磁力仪主机连接的测量探头,所述无人机底部转动连接有缓冲装置,所述氦光泵磁力仪主机固定在缓冲装置上,实现无人机与氦光泵磁力仪主机之间的缓冲,避免无人机在飞行过程中对氦光泵磁力仪主机的影响;
5.所述氦光泵磁力仪主机的底部固定连接有稳定平台,所述稳定平台的输出端与测量探头固定连接,实现测量探头与磁力线保持平行。
6.所述无人机底部设置有固定架,所述缓冲装置包括第一阻尼器和设置于第一阻尼器下方的第二阻尼器,所述第一阻尼器的顶端与固定架固定连接,所述第二阻尼器的底端连接有探测设备。
7.所述第一阻尼器的内部设置有第一转动轴,所述第二阻尼器的内部设置有第二转动轴,所述第一转动轴与第二转动轴相互垂直设置。
8.所述第一转动轴上套接有连接杆,所述连接杆的另一端套接于第二转动轴上,所述第二阻尼器的内部还设置有与第二转动轴平行的第三转动轴,所述第三转动轴上套设有支撑架,所述氦光泵磁力仪主机固定安装于支撑架的一侧,实现对氦光泵磁力仪主机的双向缓冲。
9.所述支撑架的底部设置有电池,用于供电。
10.所述支撑架上套设有连接板,所述连接板的另一端套设于连接管上,所述连接管上套设有稳定架,所述稳定平台包括设置于所述稳定架内部的驱动电机。
11.所述驱动电机的输出端固定连接有第一齿轮,所述第一齿轮通过第一旋转轴与连接管转动连接,所述第一齿轮的两端与稳定架内部转动连接,所述连接管的底部固定设置
有连接架,所述连接架内转动设置有第二旋转轴,所述第二旋转轴上固定有第二齿轮,所述第一齿轮与第二齿轮之间套设有同步带,实现驱动电机对第二齿轮的驱动。
12.所述第二旋转轴的一端固定连接测量探头的中心连接槽,实现对测量探头的测量方向的控制。
13.所述第一旋转轴与第二旋转轴均采用无磁材料,避免驱动电机对测量探头的磁干扰。
14.所述测量探头为光泵传感器。
15.优选的,所述氦光泵磁力仪主机为光泵磁力仪主机。
16.优选的,在实际的工作过程中,稳定平台始终保持传感器的光轴与磁力线处于平行状态,使测量探头始终工作在最大信噪比状态,减少转向差。
17.优选的,所述第一旋转轴通过轴承与连接管以及稳定架转动连接,所述第二旋转轴通过轴承与连接架转动连接。
18.优选的,所述轴承采用无磁材料。
19.本实用新型具有的优点和积极效果是:
20.(1)本实用新型通过设置通过缓冲装置与无人机连接的氦光泵磁力仪主机,实现了在无人机飞行过程中,对氦光泵磁力仪主机运动的缓冲,保证了氦光泵磁力仪主机的检测精准度的稳定性,避免了氦光泵磁力仪主机随无人机发生移动,导致检测精准度不高的问题。
21.(2)本实用新型通过稳定平台连接氦光泵磁力仪主机的测量探头,使得传感器的光轴与磁力线处于平行状态,使测量探头始终工作在最大信噪比状态,减少转向差。
22.(3)本实用新型通过将驱动电机、光泵磁力仪主机与电池均远离光泵传感器设置,轴承、第一转动轴与第二转动轴均采用无磁材料以及通过皮带实现光泵传感器的转动,使得避免了对光泵传感器的磁干扰,保证了光泵传感器的磁探测的精准度。
附图说明
23.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
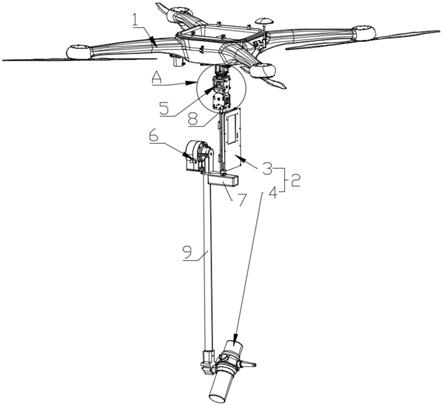
24.图1是本实用新型的一种大比例尺无人机载航磁探测设备的整体结构图;
25.图2是图1中a的局部放大图;
26.图3是本实用新型的一种大比例尺无人机载航磁探测设备的第一视角的剖视图;
27.图4是图3中b的局部放大图;
28.图5是本实用新型的一种大比例尺无人机载航磁探测设备的第二视角的剖视图;
29.图6是图5中c的局部放大图;
30.图7是图5中d的局部放大图;
31.图8是图5中e的局部放大图;
32.图中:
33.1、无人机;11、固定架;2、探测设备;3、氦光泵磁力仪主机;4、测量探头;5、缓冲装置;51、第一阻尼器;52、第二阻尼器;53、第一转动轴;54、第二转动轴;55、连接杆;56、第三转动轴;6、稳定平台;61、连接板;62、稳定架;63、驱动电机;64、第一齿轮;65、第一旋转轴;
66、第二旋转轴;67、第二齿轮;68、连接架;69、同步带;7、电池;8、支撑架;9、连接管。
具体实施方式
34.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
35.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
36.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
37.如图1至图2所示,本实用新型提供一种大比例尺无人机载航磁探测设备,包括无人机1以及与无人机1连接的探测设备2,所述探测设备2包括氦光泵磁力仪主机3以及与氦光泵磁力仪主机3连接的测量探头4,所述无人机1底部转动连接有缓冲装置5,所述氦光泵磁力仪主机3的顶部与缓冲装置5转动连接,实现无人机1与探测设备2之间的移动缓冲,避免无人机1在飞行过程中对探测设备2的影响;
38.所述氦光泵磁力仪主机3的底部固定连接有稳定平台6,所述稳定平台6的输出端与测量探头4固定连接,实现测量探头4与磁力线之间保持平行。
39.如图1、图2、图5和图6所示,所述无人机1底部设置有固定架11,所述缓冲装置5包括第一阻尼器51和设置于第一阻尼器51下方的第二阻尼器52,所述第一阻尼器51的顶端与固定架11固定连接,所述第二阻尼器52的底端连接有探测设备2。
40.所述第一阻尼器51的内部设置有第一转动轴53,所述第二阻尼器52的内部设置有第二转动轴54,所述第一转动轴53与第二转动轴54相互垂直设置。
41.所述第一转动轴53上套接有连接杆55,所述连接杆55的另一端套接于第二转动轴54上,所述第二阻尼器52的内部还设置有与第二转动轴54平行的第三转动轴56,所述第三转动轴56上套设有支撑架8,所述氦光泵磁力仪主机3固定安装于支撑架8的一侧,实现对氦光泵磁力仪主机3的双向缓冲。
42.所述支撑架8的底部设置有电池7,用于供电。
43.如图7和图8所示,所述支撑架8上套设有连接板61,所述连接板61的另一端套设于连接管9上,所述连接管9上套设有稳定架62,所述稳定平台6包括设置于所述稳定架62内部的驱动电机63。
44.所述驱动电机63的输出端固定连接有第一齿轮64,所述第一齿轮64通过第一旋转轴65与连接管9转动连接,所述第一齿轮64的两端与稳定架62内部转动连接,所述连接管9的底部固定设置有连接架68,所述连接架68内转动设置有第二旋转轴66,所述第二旋转轴
66上固定有第二齿轮67,所述第一齿轮64与第二齿轮67之间套设有同步带69,实现驱动电机63对第二齿轮67的驱动。
45.所述第二旋转轴66的一端固定连接测量探头4的中心连接槽,实现对测量探头4的测量方向的控制。
46.所述第一旋转轴65与第二旋转轴66均采用无磁材料,避免驱动电机63对测量探头4的磁干扰。
47.所述测量探头4为光泵传感器。
48.如图1、图2、图3和图4所示,优选的,所述氦光泵磁力仪主机3为光泵磁力仪主机。
49.优选的,在实际的工作过程中,稳定平台6始终保持传感器的光轴与磁力线处于平行状态,使测量探头4始终工作在最大信噪比状态,减少转向差。
50.优选的,所述第一旋转轴65通过轴承与连接管9以及稳定架62转动连接,所述第二旋转轴66通过轴承与连接架68转动连接。
51.优选的,所述轴承采用无磁材料。
52.本实用新型的工作原理和工作过程如下:
53.将固定架11与第一阻尼器51的顶端固定,将连接杆55的两端分别套设于第一转动轴53和第二转动轴54上,实现第一阻尼器51与第二阻尼器52的组装;
54.将无人机1升起,第一阻尼器51和第二阻尼器52实现对检测设备的缓冲,保证了检测设备的平稳运行,光泵传感器对磁力线进行检测,当光泵传感器的光轴与磁力线不平行时,驱动电机63开启,驱动电机63的输出端带动第一旋转轴65转动,第一旋转轴65带动第一齿轮64转动,第一齿轮64通过皮带带动第二齿轮67转动,第二齿轮67带动第二旋转轴66转动,第二旋转轴66带动光泵传感器转动,直至光泵传感器的光轴与磁力线处于平行状态,使测量探头4始终工作在最大信噪比状态,减少转向差,提高了检测准确度。
55.本实用新型的特点在于:通过设置通过缓冲装置5与无人机1连接的氦光泵磁力仪主机3,实现了在无人机1飞行过程中,对氦光泵磁力仪主机3运动的缓冲,保证了氦光泵磁力仪主机3的检测精准度的稳定性,避免了氦光泵磁力仪主机3随无人机1发生移动,导致检测精准度不高的问题;通过稳定平台6连接氦光泵磁力仪主机3的测量探头4,使得传感器的光轴与磁力线处于平行状态,使测量探头4始终工作在最大信噪比状态,减少转向差;通过将驱动电机63、光泵磁力仪主机与电池7均远离光泵传感器设置,轴承、第一转动轴53与第二转动轴54均采用无磁材料以及通过皮带实现光泵传感器的转动,使得避免了对光泵传感器的磁干扰,保证了光泵传感器的磁探测的精准度。
56.以上对本实用新型的实施例进行了详细说明,但所述内容仅为本实用新型的较佳实施例,不能被认为用于限定本实用新型的实施范围。凡依本实用新型范围所作的均等变化与改进等,均应仍归属于本专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1