一种激光雷达系统的制作方法
1.本实用新型涉及一种激光雷达系统,属于激光雷达研究技术领域。
背景技术:
2.激光雷达即激光探测及测距系统lidar(light detection and ranging),是一种通过发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是先向目标发射探测激光光束,然后由接收器接收从目标反射回来的信号,最后激光雷达将反射信号与发射信号进行比较,作适当处理后就可获得目标的有关信息,例如目标距离、方位、高度、速度、姿态、甚至形状等参数。由于激光雷达对环境感知的先天优势,使其在无人驾驶,避障等领域具有很好的应用前景。目前激光雷达主要包括机械式旋转激光雷达和拼接式mems雷达,机械式旋转激光雷达由旋转部件带动发射模块、接收模块360
°
旋转以得到周围环境距离信号,然而上述机械旋转式激光雷达有诸多缺点:多线(如32线、64线)的激光雷达发射模块与接收模块以成对的方式设置,对角度设置要求高,制造难度大,不利于量产且价格高昂;其旋转部件容易磨损甚至失效,需要定期维护。拼接式mems雷达的使用寿命和维护上都比机械式雷达更具优势,但mems激光雷达水平视场角通常只有45
°
左右,如果需要更大的视场角,只能通过拼接的方法实现,一般需要3-5路的光路拼接才能实现大角度的目标扫描,同样的器件需要使用多路,价格昂贵。
技术实现要素:
3.本实用新型的技术目的在于提供一种激光雷达系统,能够克服现有技术存在的缺陷并实现扩束扫描,满足准确探测和良好接收效果的要求。
4.为了解决上述问题,本实用新型采用的技术方案如下:
5.一种激光雷达系统,包括光源单元、扫描单元和接收单元,
6.所述光源单元包含激光器、准直镜和特质镜片,所述特质镜片的中心区域镀有反射膜,特质镜片在中心区域以外的区域镀有增透膜,
7.所述扫描单元包括mems振镜和由电机控制的棱镜,所述mems振镜具有垂直和水平两个方向的扫描角度,能控制入射到反射面上的激光进行两个方向的出射,
8.所述接收单元包含特质镜片,聚焦镜和传感器,
9.所述激光器发射的光束进入准直镜,经准直镜整形后得到的准直激光束入射至特质镜片的中心区域,经反射膜反射到mems振镜上,mems振镜将激光反射到棱镜的反射面,棱镜的每个反射面上都贴有反射膜,棱镜的反射面将激光反射到探测目标上,从探测目标上反射回来的激光经过棱镜的反射面反射至mems棱镜上,然后透过特质镜片的增透膜,被聚焦镜汇聚进入到传感器中,
10.当mems振镜在水平方向扫描时,配合棱镜的旋转,出射的激光光束能照射在探测目标水平方向的不同位置,实现水平方向的扫描,当mems振镜在垂直方向振动时,出射光被棱镜反射到目标上,实现对探测目标垂直方向的扫描。
11.进一步,所述特质镜片及特质镜片中心区域的形状均为方形。
12.进一步,所述电机的转轴与棱镜的底部相连接。
13.进一步,所述棱镜为五棱镜。
14.进一步,所述传感器为单光子探测器或光电传感器。
15.与现有技术相比,本实用新型的有益效果在于:
16.1、本实用新型能够通过mems振镜和由电机控制棱镜旋转来进行扩束扫描,实现对环境的准确探测扫描。使用棱镜的旋转对激光进行反射,不需要用拼接的方式实现扩束,大大节约成本。
17.2、本实用新型结构简单、装调标定方便、使用安装简单,容易实现量产。
18.3、本实用新型中的特质镜片能够提高光学效率同时减少系统的杂散光。
附图说明
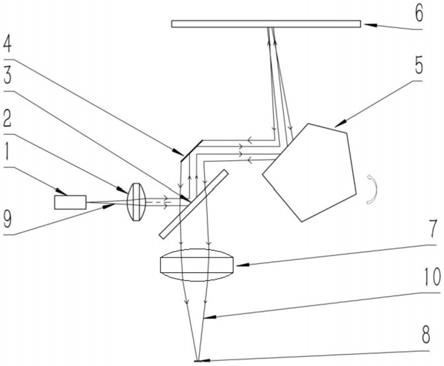
19.图1为本实用新型一实施例的结构示意图。
20.图2为本实用新型所涉及的特质镜片的俯视图。
21.图3为本实用新型所涉及的棱镜的结构示意图。
22.图4为本实用新型所涉及的棱镜与电机的连接示意图。
23.图5为本实用新型应用示意图之一,该图中,mems振镜在水平方向摆动时,出射光照射在探测目标的左侧不同区域上。
24.图6为本实用新型另一应用示意图,该图中,mems振镜在水平方向摆动时,出射光照射在探测目标的右侧不同区域上。
具体实施方式
25.以下结合附图和具体实施例对本实用新型做进一步的详细说明。根据下面的说明,本实用新型的目的、技术方案和优点将更加清楚。需要说明的是,所描述的实施例是本实用新型的优选实施例,而不是全部的实施例。
26.结合图1所示,一种激光雷达系统,包括光源单元、扫描单元和接收单元。
27.所述光源单元包含激光器1、准直镜2和特质镜片3,参考图2,所述特质镜片3的中心区域镀有反射膜3-1,能够对光束进行全反射,特质镜片3在中心区域以外的区域镀有增透膜3-2,激光可以透过该区域。特质镜片3的中心区域面积比较小,镀有增透膜的区域很大,这样做的优势在于,能够在需要对激光反射时,反射所有的激光。需要不影响激光透过时,尽可能透过最多的激光,减少光能量的损耗。而普通的半反半透镜片对激光反射一半透射一半,激光束经过半反半透镜片会有一半的能量得不到利用,降低了激光的利用率,并且不能利用的那部分激光会在整个光路中成为杂散光,影响最终得信号质量。因此用特质镜片3来替代常规的半反半透镜片,能够降低激光的损耗,且有利于减少整个光路中的杂散光。
28.结合图1和图3所示,所述扫描单元包括mems振镜4和由电机11控制的棱镜5,电机的转轴与棱镜的底部相连接。所述mems振镜4具有垂直和水平两个方向的扫描角度,能控制入射到反射面上的激光进行两个方向的出射。所述接收单元包含特质镜片3,聚焦镜7和传感器8。所述传感器8优选为单光子探测器或光电传感器。
29.扫描单元用于实现激光对周围环境的照射,由mems振镜4和棱镜5共同配合完成。本实施例以五角棱镜为例。棱镜5的顶视图是一个非等边的五边形,该五边形的每一个内角角度都不相等,如图1中5所示。图3为棱镜的侧视图,其有5个反射面,每个反射面上都贴有反射膜,能对激光进行反射。5-1和5-2为其中的两个反射面,该棱镜一共有5个反射面。参考图4,所述电机11的转轴与棱镜5的底部相连接。
30.本实用新型的工作原理是,激光器1发射的光束进入准直镜2,经准直镜2整形后得到的准直激光束入射至特质镜片3的中心区域,经反射膜3-1反射到mems振镜4上,mems振镜4将激光反射到棱镜5的反射面,每个反射面上都贴有反射膜,棱镜的反射面将激光反射到探测目标6上,从探测目标6上反射回来的激光经过棱镜5的反射面反射至mems棱镜4上,然后透过特质镜片3的增透膜3-2,被聚焦镜7汇聚进入到传感器8中,
31.当mems振镜在水平方向扫描时,配合棱镜的旋转,出射的激光光束能照射在探测目标6水平方向的不同位置,实现水平方向的扫描,当mems振镜在垂直方向振动时,出射光被棱镜反射到目标上,实现对探测目标垂直方向的扫描。
32.以上所述,仅是本实用新型优选实施例的描述说明,并非对本实用新型保护范围的限定,显然,任何熟悉本领域的技术人员基于上述实施例,可轻易想到替换或变化以获得其他实施例,这些均应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1