一种清洗效果测试装置的制作方法
1.本实用新型涉及清洁机器人技术领域,特别是涉及一种清洗效果测试装置。
背景技术:
2.目前,在对清洁机器人的清洗效果进行测试时,一般是对地面进行喷水,然后配合滚刷对地面进行清洗。
3.虽然该测试方式能得到清洁机器人对地面的清洗效果,但是也会在地面上残留大量的水,清理起来比较麻烦。
技术实现要素:
4.基于此,本实用新型的目的在于,提供一种便于清理的清洗效果测试装置。
5.一种清洗效果测试装置,用于供清洁机器人进行清洗效果的测试,包括测试支撑台,所述测试支撑台上端面设有用于供清洁机器人进行清洗效果测试的地板模组,所述测试支撑台位于所述地板模组的外周开设有导流槽,所述测试支撑台的底部设有上部开口的容水盒,所述导流槽底部开设有贯通至所述测试支撑台底部的出水口,且所述出水口位于所述容水盒上方。
6.在本实用新型中,通过在所述测试支撑台上设置地板模组,同时所述测试支撑台在所述地板模组的外周开设有导流槽,进而在清洁机器人在地板模组上测试清洗效果时,喷出的水能流入所述导流槽内,并最终流入所述容水盒内进行收集,以避免水流四处扩散,影响测试环境,同时减少清理的工作。
7.优选地,所述测试支撑台上端面开设有安装槽,所述安装槽内放置有所述地板模组,所述地板模组外侧壁与所述安装槽的内侧壁之间存有间隙,所述间隙形成所述导流槽。
8.优选地,所述安装槽为矩形的安装槽,所述地板模组为矩形的地板模组,所述地板模组设于所述安装槽中部。
9.优选地,所述地板模组上端面与所述测试支撑台的上端面平齐。
10.优选地,所述地板模组可以是瓷砖、水泥或沥青的地板模组。
11.优选地,所述容水盒通过支撑组件连接于所述测试支撑台底部。
12.优选地,所述支撑组件包括呈u型的支撑板,所述支撑板的两端固定于所述测试支撑台底部,所述支撑板沿同一水平方向间隔设有多个所述支撑板,多个所述支撑板与所述测试支撑台底部之间形成用于支撑所述容水盒的容置空间。
13.优选地,所述容水盒的侧面设有用于方便将所述容水盒从所述容置空间内抽出的把手。
14.优选地,所述支撑板由金属材料制成。
15.相对于现有技术来说,在本实用新型的清洗效果测试装置中,通过地板模组和导流槽的设置,以在清洁机器人测试清洗效果时喷出的水能通过导流槽流至容水盒内,以减少清理的工作。
16.为了更好地理解和实施,下面结合附图详细说明本实用新型。
附图说明
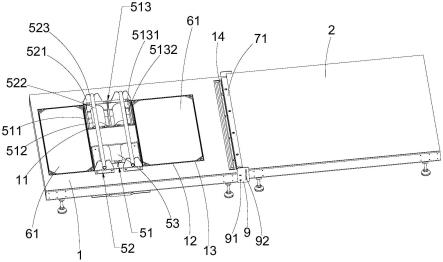
17.图1为本实用新型中一实施例的整体结构立体图;
18.图2为图1中a处放大图;
19.图3为本实用新型中一实施例的测试支撑台与越障支撑台的结构示意图;
20.图4为本实用新型中一实施例的测试支撑台上越障测试装置的分解图。
21.附图标记:1、测试支撑台;11、嵌入槽;12、导流槽;13、安装槽;14、沟槽;2、越障支撑台;3、倾斜支撑台;31、尼龙垫板;4、可调支座;5、驱动轮辅助调试装置;51、滚筒模组;511、安装盒体;512、滚筒;513、抱紧组件;5131、上夹块;5132、下夹块;52、限制组件;521、限制座;522、限制轴;523、连接槽;53、盖板;6、清洗效果测试装置;61、地板模组;62、容水盒;63、支撑板;64、把手;7、越障测试装置;71、垫块;711、高度调节板;712、卡槽;72、宽度调节板;721、导向槽;73、导向杆;74、限位螺母;75、调节螺栓;8、倾斜度调节板;81、圆弧形槽孔;9、拼接板;91、固定孔;92、竖向调节孔。
具体实施方式
22.在本说明书中提到或者可能提到的上、下、左、右、前、后、正面、背面、顶部、底部等方位用语是相对于其构造进行定义的,它们是相对的概念。因此,有可能会根据其所处不同位置、不同使用状态而进行相应地变化。所以,也不应当将这些或者其他的方位用语解释为限制性用语。
23.以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本公开的一些方面相一致的方法的例子。
24.在本公开使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本公开。在本公开和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
25.如图1所示,本实用新型涉及一种清洁机器人性能测试设备,包括依次拼接一起的倾斜支撑台3、测试支撑台1以及越障支撑台2,所述测试支撑台1上设有用于辅助清洁机器人驱动轮调试的驱动轮辅助调试装置5和用于测试清洁机器人清洗效果的清洗效果测试装置6,所述测试支撑台1和所述越障支撑台2之间设有用于测试清洁机器人越障能力的越障测试装置7。
26.在本实用新型中,通过设置依次拼接一起的倾斜支撑台3、测试支撑台1以及越障支撑台2,同时在测试支撑台1上设置有驱动轮辅助调试装置5、清洗效果测试装置6以及越障测试装置7,进而清洁机器人可以在所述清洁机器人性能测试设备上进行驱动轮的调试、清洗效果的测试,以及越障能力的测试,通过集成了多项测试装置,使清洁机器人的性能测试操作更加方便,提高清洁机器人性能测试的效率,实用性高。
27.结合图3所示,在本实施例中,所述驱动轮辅助调试装置5包括滚筒模组51,所述测试支撑台1上端面并排设有两个所述滚筒模组51,也即是,两所述滚筒模组51连线的方向垂
直于所述倾斜支撑台3到越障支撑台2的方向,所述滚筒模组51包括上部开口的安装盒体511和滚筒512,所述安装盒体511连接于所述测试支撑台1上端面,所述安装盒体511内间隔设有两所述滚筒512,且两所述滚筒512的轴线相互平行,所述滚筒512可相对于所述安装盒体511自转。
28.通过在所述测试支撑台1上端面设有两个所述滚筒模组51,以对应辅助清洁机器人下部的两个驱动轮进行调试,清洁机器人的驱动轮可压设于一安装盒体511内的两所述滚筒512之间,以在驱动轮转动时,带动滚筒512进行转动,进而使清洁机器人的两驱动轮在转动过程中,稳定停留在两滚筒模组51上部,便于调试人员根据驱动轮的运转情况进行调试,使调试更加容易,不会发生清洁机器人乱跑,乱撞的情况。
29.优选地,所述测试支撑台1上端面并排开设有两个嵌入槽11,两所述安装盒体511对应嵌入两所述嵌入槽11内,同时,所述安装盒体511上部与所述测试支撑台1上端面平齐,所述滚筒512的上部从所述安装盒体511上部开口部分伸出,进而可以便于清洁机器人移动至所述滚筒模组51上,方便调试的进行。
30.进一步地,所述驱动轮辅助调试装置5还包括两个限制组件52,两所述限制组件52对应架设于所述滚筒模组51前后两端,也即是,其一限制组件52架设于所述滚筒模组51靠近倾斜支撑台3的一端,另一限制组件52架设于所述滚筒模组51靠近越障支撑台2的一端,以用于在清洁机器人的驱动轮调试过程中,进一步限制驱动轮从两滚筒512之间脱离出来,保证调试过程的顺利。
31.具体地,所述限制组件52包括限制座521和限制轴522,所述限制座521设有两个,两所述滚筒模组51相互远离的两侧对应设有所述限制座521,且两所述限制座521均连接于所述测试支撑台1上,所述限制轴522架设于两所述限制座521之间,并且所述限制轴522可相对于所述限制座521自转。
32.通过架设两所述限制轴522,以在驱动轮前后两端起到阻挡作用,以防止在驱动轮转动过程中,因意外情况从两所述滚筒512之间脱离出来,并导致安全事故。
33.更进一步地,所述限制座521沿竖直方向开设有连接槽523,且所述连接槽523上部开口,所述限制轴522从所述连接槽523上部放入所述连接槽523内,进而可以实现所述限制轴522可拆卸架设于两所述限制座521之间,以在清洁机器人移动至两滚筒512上部过程中,可以先拆除所述限制轴522,便于清洁机器人移动至滚筒512上,或者是在清洁机器人的驱动轮调试完毕后,拆除所述限制轴522,以便于清洁机器人从滚筒512上脱离。
34.再更进一步地,所述连接槽523上部的开口呈漏斗状,也即是,所述连接槽523上部开口处的两侧壁之间的距离从下至上逐渐增大,以便于所述限制轴522伸入所述连接槽523内。
35.所述滚筒模组51还包括用于限制所述滚筒512转动的抱紧组件513,进而在清洁机器人移动至所述滚筒512上部过程中,将滚筒512锁止,以供清洁机器人的驱动轮爬上所述滚筒512上部。
36.具体地,所述抱紧组件513包括上夹块5131、下夹块5132以及锁紧件,所述上夹块5131和所述下夹块5132均设于所述安装盒体511内,所述上夹块5131和所述下夹块5132相互正对的两侧均设有抱紧槽,两所述抱紧槽形成用于夹紧所述滚筒512一端的夹紧空间,所述下夹块5132固定于所述安装盒体511底部,所述上夹块5131通过所述锁紧件锁紧于所述
下夹块5132上部,以配合所述下夹块5132抱紧所述滚筒512。
37.所述上夹块5131和下夹块5132之间形成有夹紧滚筒512的夹紧空间,同时所述上夹块5131通过锁紧件锁紧于下夹块5132上,以配合下夹块5132抱紧所述滚筒512,以限制所述滚筒512转动,进而便于清洁机器人的驱动轮爬上或是脱离出两所述滚筒512上部之间。
38.优选地,所述锁紧件为锁紧螺栓,所述上夹块5131的两端均通过所述锁紧螺栓锁紧于所述下夹块5132上部,以保证所述上夹块5131和下夹块5132连接的稳固性。
39.在本实施例中,所述滚筒模组51还包括盖板53,所述盖板53盖设于所述安装盒体511上部开口处,所述盖板53对应于所述滚筒512和上夹块5131的区域均开设有让位口。
40.通过所述盖板53的设置,以避免杂物落入所述安装盒体511内,影响所述滚筒512的转动。
41.所述清洗效果测试装置6包括设于所述测试支撑台1上端面,以用于供清洁机器人进行清洗效果测试的地板模组61,所述测试支撑台1位于所述地板模组61的外周开设有导流槽12,所述测试支撑台1的底部设有上部开口的容水盒62,所述导流槽12底部开设有贯通至所述测试支撑台1底部的出水口,且所述出水口位于所述容水盒62上方。
42.通过在所述测试支撑台1上设置地板模组61,同时所述测试支撑台1在所述地板模组61的外周开设有导流槽12,进而在清洁机器人在地板模组61上测试清洗效果时,喷出的水能流入所述导流槽12内,并最终流入所述容水盒62内进行收集,以避免水流四处扩散,影响测试环境,同时减少清理的工作。
43.优选地,所述测试支撑台1上端面开设有安装槽13,所述安装槽13内放置有所述地板模组61,所述地板模组61上端面与所述测试支撑台1上端面平齐,所述地板模组61外侧壁与所述安装槽13的内侧壁之间存有间隙,所述间隙形成所述导流槽12;所述地板模组61设于所述滚筒模组51和所述越障支撑台2之间。
44.通过所述安装槽13的设置,以供所述地板模组61的安装;同时所述地板模组61位于所述滚筒模组51和所述越障支撑台2之间,进而在清洁机器人的驱动轮在滚筒模组51上调试过程中,也可以同时对清洁机器人的清洗效果进行测试,提高清洁机器人性能测试的效率。
45.进一步地,所述安装槽13为矩形的安装槽13,所述地板模组61为矩形的地板模组61,所述地板模组61设于所述安装槽13中部,也即是,所述地板模组61的四侧与所述安装槽13的四个内侧壁一一对应,且地板模组61的四侧与安装槽13的四个内侧壁之间均存有间隙,以确保水流的完全流入所述导流槽12内。
46.在本实施例中,所述地板模组61可以是瓷砖、水泥或沥青的制成的地板模组61,以分别模仿瓷砖地面、水泥地面或沥青地面,以测试出清洁机器人对不同地面的清洗效果,实用性高。
47.在本实施例中,所述容水盒62通过支撑组件连接于所述测试支撑台1底部,所述支撑组件包括呈u型的支撑板63,所述支撑板63上部的两端固定于所述测试支撑台1底部,所述支撑板63沿同一水平方向间隔设有多个所述支撑板63,多个所述支撑板63与所述测试支撑台1底部之间形成用于支撑所述容水盒62的容置空间,以将所述容水盒62稳定支撑于所述测试支撑台1底部,并且便于所述容水盒62的取出。
48.优选地,所述容水盒62的侧面设有用于方便将所述容水盒62从所述容置空间内抽
出的把手64,以便于测试人员放置和取出所述容水盒62。
49.进一步地,所述支撑板63由金属材料制成,所述支撑板63可以由不锈钢制成,也可以由铝合金制成,以稳定支撑住所述容水盒62。
50.结合图4所示,所述越障测试装置7包括开设于测试支撑台1上端面的沟槽14和连接于所述测试支撑台1上端面的垫块71,所述越障支撑台2上端面的水平高度高于测试支撑台1上端面的水平高度,所述测试支撑台1靠近越障支撑台2一端的上端面开设有所述沟槽14,所述沟槽14位于所述地板模组61和所述越障支撑台2之间,且所述沟槽14的长度方向与越障支撑台2抵接于测试支撑台1的一侧平行,所述垫块71位于所述沟槽14和越障支撑台2之间,且所述垫块71长度方向与所述沟槽14长度方向平行,所述垫块71长度方向的一侧与沟槽14背对越障支撑台2的一侧平齐,所述垫块71长度方向的另一侧抵接于所述越障支撑台2侧面,且所述垫块71的上端面与所述越障支撑台2上端面平齐。
51.通过将所述沟槽14和所述垫块71相邻设置,以模仿电梯与楼层之间存在间隙并且电梯水平面高于楼层的路障情况,以确保测试基于实际情况进行,保证生产的清洁机器人在实际应用过程中,能顺利通过电梯往返各个楼层;同时,常规的越障测试中,仅在平面上凸起一个路障,在清洁机器人的驱动轮越过路障后会掉落至平面上,使清洁机器人的重心、受力都发生了变化,不符合实际进入电梯的情况,所以,所述垫块71的上平面与越障支撑台2的上平面平齐,可以在清洁机器人的驱动轮越过垫块71后直接踏足在越障支撑台2上,以确保越障测试更符合实际情况;再来,所述沟槽14位于所述地板模组61和所述越障支撑台2之间,进而在清洁机器人的驱动轮前端准备跨越沟槽14和垫块71过程中,所述驱动轮的下端位于所述地板模组61上,进而可以测试出清洁机器人在不同地板模组61的情况下,越障的具体情况,以更符合清洁机器人实际的越障情况,更进一步提高了清洁机器人越障测试的全面性。
52.优选地,所述沟槽14正对所述越障支撑台2一侧至沟槽14背对所述越障支撑台2一侧的方向上依次嵌入有至少一个宽度调节板72,以用于调节沟槽14的宽度。
53.通过选择放入宽度调节板72的数量,可以调节所述沟槽14的宽度,进而可以测试出不同沟槽14宽度下,清洁机器人的越障能力,提高测试的全面性。
54.进一步地,所述沟槽14正对所述越障支撑台2的一侧与所述沟槽14背对所述越障支撑台2的一侧之间相互连接有导向杆73,所述宽度调节板72下部开设有扣设于所述导向杆73上的导向槽721。
55.通过所述导向杆73和所述导向槽721的设置,进而可以方便将所述宽度调节板72放入所述沟槽14内,便于测试人员的操作。
56.更进一步地,所述导向杆73上开设有螺纹段,所述螺纹段上螺纹连接有用于抵紧在宽度调节板72正对越障支撑台2一侧的限位螺母74。
57.通过所述限位螺母74的设置,进而可以将放置于所述沟槽14内的宽度调节板72抵紧在沟槽14的侧壁上,确保宽度调节板72的位置稳固,以保证越障测试的准确性。
58.再更进一步地,所述导向杆73沿所述沟槽14长度方向均匀设有多个,所述宽度调节板72沿长度方向设有多个导向槽721,多个所述导向槽721与多个所述导向杆73一一对应设置,并且多个所述导向杆73上均螺纹连接有所述限位螺母74,进而进一步提高宽度调节板72位置的稳定。
59.在本实施例中,所述垫块71背对所述越障支撑台2一侧与所述垫块71上端面之间为圆弧过渡,进而模拟出电梯的门槛边,提高测试的准确性,以确保生产调试出的清洁机器人能顺利应用。
60.在本实施例中,所述测试支撑台1和/或越障支撑台2的高度可调节,所述垫块71包括至少一个沿竖直方向依次层叠于测试支撑台1上端面的高度调节板711。
61.所述测试支撑台1和/或越障支撑台2的高度可调节,进而可以调节两者中任一的高度,以确保所述测试支撑台1和所述越障支撑台2之间形成有高度差,进而满足对清洁机器人越障的测试情况,同时,保证最上层的高度调节板711的上端面与越障支撑台2上端面平齐。通过调节所述测试支撑台1和越障支撑台2之间的高度,进而可以测试出清洁机器人对不同高度障碍的通过情况,提高测试的全面性。
62.具体地,所述测试支撑台1和所述越障支撑台2均呈矩形板状,所述测试支撑台1和所述越障支撑台2底部的四个拐角处均设有可调支座4,所述可调支座4的高度可调节,以用于支撑并调节所述测试支撑台1和越障支撑台2的水平高度。
63.优选地,所述高度调节板711通过调节螺栓75固定于所述测试支撑台1上,以保证所述高度调节板711位置的稳固,所述调节螺栓75从上至下贯穿所述高度调节板711并螺纹连接于所述测试支撑台1上,所述高度调节板711正对于所述越障支撑台2的一侧开设有卡槽712,所述卡槽712扣设于所述调节螺栓75上,进而便于多个所述高度调节板711的安装到位,并且在所述高度调节板711安装完毕后,旋紧所述调节螺栓75,以将高度调节板711夹紧在所述测试支撑台1上。
64.进一步地,所述调节螺栓75沿所述高度调节板711长度方向设有多个,所述高度调节板711沿长度方向设有多个所述卡槽712,多个所述卡槽712与多个所述调节螺栓75一一对应设置,以确保高度调节板711位置的稳固性。
65.结合图2所示,在本实施例中,所述倾斜支撑台3的两侧均设有倾斜度调节板8,并且所述倾斜度调节板8与所述倾斜支撑台3固定连接,所述测试支撑台1两侧对应于两所述倾斜度调节板8内侧连接,并且所述倾斜度调节板8可相对于所述测试支撑台1沿竖直方向转动,所述倾斜度调节板8抵接于所述测试支撑台1的区域开设有圆弧形槽孔81,所述倾斜度调节板8与所述测试支撑台1之间通过锁止螺栓锁止,所述锁止螺栓从所述倾斜度调节板8外侧贯穿所述圆弧形槽孔81,并旋紧于所述测试支撑台1上,以限制所述倾斜度调节板8相对于所述测试支撑台1转动。
66.通过所述倾斜度调节板8的设置,以用于对清洁机器人爬坡能力进行测试,同时,所述倾斜支撑台3的倾斜度可调节,进而可以测试清洁机器人对不同坡度的攀爬情况。
67.所述倾斜支撑台3在调节其倾斜度时,旋松所述锁止螺栓,然后所述倾斜支撑台3可以相对于所述测试支撑台1转动,以带动所述倾斜度调节板8相对于所述测试支撑台1转动,在这过程中,所述锁止螺栓相对于所述倾斜度调节板8沿圆弧形槽孔81移动,在调节好所述倾斜支撑台3的倾斜度后,将所述锁止螺栓旋紧,以使所述倾斜度调节板8相对于所述测试支撑台1固定,完成倾斜支撑台3的倾斜度调节;同时,在调节所述倾斜支撑台3的倾斜度过程中,需要配合调节所述测试支撑台1和越障支撑台2的水平高度,以保持测试支撑台1和越障支撑台2底部的可调支座4底部与倾斜支撑台3下端处于同于水平面上,保证所述清洁机器人性能测试设备平稳架设在地面上。
68.在本实施例中,所述倾斜支撑台3设有两个,所述测试支撑台1和所述越障支撑台2相互背对的两侧均设有所述倾斜支撑台3,所述倾斜支撑台3同样通过所述倾斜度调节板8与所述越障支撑台2连接。另外,所述测试支撑台1上滚筒模组51与所述越障支撑台2之间和所述滚筒模组51与所述倾斜支撑台3之间均设有所述地板模组61。
69.通过两所述倾斜支撑台3的设置,进而可以供清洁机器人从两个方向来进入清洁机器人性能测试设备中,并且在清洁机器人从越障支撑台2进入至所述测试支撑台1时,模拟了清洁机器人出电梯的情况,提高了所述清洁机器人性能测试的全面性。
70.在本实施例中,所述倾斜支撑台3底部设有尼龙垫板31,进而能避免刮破瓷砖表面。
71.如图3所示,在本实施例中,所述测试支撑台1和所述越障支撑台2之间通过拼接板9连接,所述测试支撑台1两侧均设有所述拼接板9,所述拼接板9一侧连接于所述测试支撑台1侧面,其另一侧连接于所述越障支撑台2侧面;具体地,所述拼接板9位于所述测试支撑台1的一侧区域开设有固定孔91,进而可以通过固定螺栓将所述拼接板9和测试支撑台1固定连接,所述拼接板9位于所述越障支撑台2的一侧区域沿竖直方向开设有竖向调节孔92,进而可以在所述测试支撑台1和越障支撑台2的高度调节完毕后,通过固定螺栓将所述拼接板9和越障支撑台2进行固定,实现了所述测试支撑台1和越障支撑台2之间的固定。
72.在本实施例中,所述倾斜支撑台3、测试支撑台1以及越障支撑台2沿长度方向的两侧均设有护栏,以确保清洁机器人的安全测试。
73.综上,相对于现有技术来说,本实用新型的所述清洁机器人性能测试设备中,通过在所述清洁机器人性能测试设备上集成有驱动轮辅助调试装置5、清洗效果测试装置6以及越障测试装置7,以提高测试的便捷性和效率,同时模拟了清洁机器人在跨越电梯与楼层之间的实际路况,以确保生产调试后的清洁机器人能顺利应用在实际的环境中。
74.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1