共光路激光雷达系统的制作方法
1.本技术涉及激光雷达领域,尤其涉及一种共光路激光雷达系统。
背景技术:
2.目前,激光雷达广泛应用在军事、汽车、机器人和航海等领域。例如,激光雷达能够应用于agv(automated guided vehicle,自动导引运输车)防撞和导航、服务机器人导航、无人驾驶和汽车辅助驾驶中,检测系统外部是否存在物体,以及检测目标对象与系统的距离信息,从而根据距离信息执行相应的安全操作。例如使智能家居(例如扫地机器人)能够行走而不撞到人或其他物体;使楼梯的不同阶层发出不同的声音,例如在楼梯的不同阶层上分别放置多个激光雷达,该多个激光雷达连接能够发出不同声音的发声器件,当相应阶层的激光雷达检测到物体对象时,即可发出对应的声音等。激光雷达已成为众多智能设备的核心部件,它的重要性不言而喻。
3.但是,目前大多数激光雷达的结构较为复杂,且多采用收发分置的结构方式,致使发射视场和接收视场存在不重叠的部分,当目标物体处于不重叠的部分时,例如当目标物体较为接近激光雷达而位于不重叠的视野盲区时,激光雷达无法探测到该目标物体的存在,出现近距离盲区的问题,降低了激光雷达的探测效率。另外,激光的探测区域有限,虽能在圆周范围内进行探测,但未能在高度方向上扩展探测区域。
技术实现要素:
4.为了改善或解决背景技术中提到的至少一个问题,本技术提供了共光路激光雷达系统。
5.该共光路激光雷达系统包括:
6.发射模块,所述发射模块用于提供线激光;
7.第一反射镜,所述第一反射镜用于接收所述线激光,并形成第一光束;
8.第二反射镜,所述第二反射镜用于接收所述第一光束,并形成反射至目标对象的第二光束,以及接收从所述目标对象返回的第一返回光,并形成反射的第二返回光;
9.接收镜组,所述接收镜组用于接收所述第二返回光,并将所述第二返回光汇聚形成第三返回光;以及
10.线阵探测器,所述线阵探测器用于接收所述第三返回光,并将所述第三返回光转换为电信号。
11.在至少一个实施方式中,所述发射模块包括发射激光器和整形镜组,所述整形镜组能够将所述发射激光器发出的初始激光整形为所述线激光,所述发射激光器为边缘发射激光器。
12.在至少一个实施方式中,所述第一反射镜、所述第二反射镜的反射面镀有增反膜,所述增反膜用于增加所述第一反射镜和所述第二反射镜的特定光波段的反射率,所述特定光波段包括所述线激光的波长。
13.在至少一个实施方式中,所述共光路激光雷达系统还包括滤光片,所述滤光片放置在所述接收镜组与所述第二反射镜之间,和/或放置在所述接收镜组与所述线阵探测器之间。
14.在至少一个实施方式中,所述共光路激光雷达系统还包括处理模块,所述处理模块被配置为根据所述发射模块发射所述线激光的时刻和所述线阵探测器接收所述第三返回光的时刻,确定所述目标对象与所述共光路激光雷达系统之间的距离。
15.在至少一个实施方式中,所述共光路激光雷达系统还包括旋转轴和驱动模块,所述第二反射镜连接于所述旋转轴,所述驱动模块被设置成能够驱动所述旋转轴在0~360度的范围内转动。
16.在至少一个实施方式中,所述第一反射镜的反射面与所述线激光的入射方向的夹角为45度。
17.在至少一个实施方式中,所述第二反射镜的反射面与所述旋转轴的夹角为45度。
18.本技术提供的共光路激光雷达系统结构简单,发射视场和接收视场重叠,使得返回光的接收效率高,能够解决或改善视野盲区的问题。本技术通过使用线激光和线阵探测器,能够在高度方向上增大探测区域,通过旋转反射镜即可实现三维空间上的探测,解决或改善探测范围不够大的问题。
附图说明
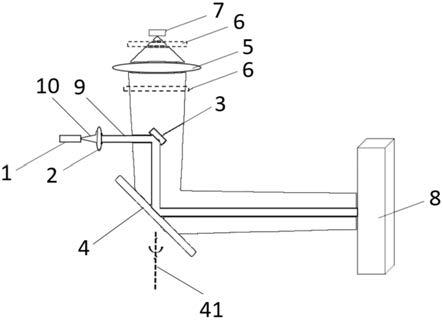
19.图1示出了根据本技术实施方式的共光路激光雷达系统的结构示意图。
20.图2示出了根据本技术实施方式的共光路激光雷达系统的发射激光器的发光面的示意图。
21.图3示出了根据本技术实施方式的共光路激光雷达系统的原理图。
22.图4示出了根据本技术实施方式的共光路激光雷达系统的局部结构示意图。
23.附图标记说明
24.1发射激光器;2整形镜组;3第一反射镜;4第二反射镜;41旋转轴;42驱动模块;5接收镜组;6滤光片;7线阵探测器;8目标对象;9线激光;10初始激光。
具体实施方式
25.下面参照附图描述本技术的示例性实施方式。应当理解,这些具体的说明仅用于示教本领域技术人员如何实施本技术,而不用于穷举本技术的所有可行的方式,也不用于限制本技术的范围。
26.本技术提供的共光路激光雷达系统可应用于agv(automated guided vehicle,自动导引运输车)防撞和导航、服务机器人导航、无人驾驶和汽车辅助驾驶等应用场景,还可以配置在智能家居等需要使用激光雷达的设备中。
27.如图1所示,本技术提供的共光路激光雷达系统包括发射模块、第一反射镜3、第二反射镜4、接收镜组5和线阵探测器7。
28.如图1、3所示,发射模块提供线激光9,线激光9入射到第一反射镜3上,第一反射镜3形成反射的第一光束,第一光束入射到第二反射镜4上。第二反射镜4形成反射的第二光束,第二光束入射到被测目标8上。被测目标8的漫反射光(也称第一返回光)经过第二反射
镜4形成反射的第二返回光,第二返回光经过接收镜组5汇聚形成第三返回光,第三返回光再照射到线阵探测器7上。线阵探测器7将光信号转化为电信号,后续还可以设置处理模块,对该电信号进行相应处理,形成探测目标的激光(第一光束、第二光束)与漫反射的返回光(第二返回光、第一返回光)能够共光路的激光雷达系统。
29.如图1、2所示,发射模块用于提供截面为线束形状的线激光9。发射模块可以包括发射激光器1和整形镜组2。发射激光器1用于提供初始激光10,该初始激光10经过整形镜组2,被整形为线激光9。在本技术的一个实施方式中,发射激光器1可以为边缘发射激光器(eel),边缘发射激光器具有快慢轴发散角不一样,快轴发散角大于慢轴发散角,快轴发光长度小于慢轴发光长度,快轴准直容易,慢轴准直困难的特性。利用上述特性,对快轴方向进行准直,可以使初始激光10形成线激光9。
30.如图1所示,第一反射镜3的反射面可以朝向发射模块,第一反射镜3用于接收线激光9,并对线激光9执行反射操作,形成第一光束。第二反射镜4用于接收第一光束,并形成反射至目标对象8的第二光束,以及接收从目标对象8返回的第一返回光,并形成朝向线阵探测器7反射的第二返回光。
31.在一些可能的实施方式中,第一反射镜3的反射面与线激光9入射方向的夹角可以为45度。第二反射镜4的反射面朝向第一反射镜3的反射面,进而能接收从第一反射面3反射出的第一光束。本技术对于线激光9与第一反射镜3的反射面的夹角,以及第一反射镜3和第二反射镜4的相对位置不进行具体限制。可以理解,本领域技术人员可以根据实际应用场景灵活选择第一反射镜3的位置以及第一反射镜3与线激光9入射方向的夹角角度。
32.第一反射镜3和第二反射镜4可以为平面反射镜、球面反射镜或其他非球面反射镜等,形状可以为圆形、椭圆形、方形等,本技术对此不进行限制。并且,第一反射镜3和第二反射镜4可以为全反反射镜,由此增加第一反射镜3和第二反射镜4对照射到其反射面光线的反射率。
33.或者,第一反射镜3和第二反射镜4的反射面上还可以镀设增反膜,增加反射率。
34.作为一个示例,以第一反射镜3的反射面为例,线激光9可以为单一波长的光波,例如为905nm的单波长光波,则第一反射镜3的反射面可以镀上波长为905nm的增反膜。或者,第一反射镜3的反射面可以镀包含线激光9波长的特定光波段的增反膜,例如镀上800-1000nm光波段的增反膜。
35.作为另一个示例,以第一反射镜3的反射面为例,线激光9可以为单一波长的光波,例如为1550nm的单波长光波,则第一反射镜3的反射面可以镀上波长为1550nm的增反膜。或者,第一反射镜3的反射面可以镀包含线激光9波长的特定光波段的增反膜,例如镀上1500-1600nm光波段的增反膜。
36.本领域技术人员能够理解,本技术实施方式应不限于此。本领域技术人员可以根据实际应用场景灵活选择增反膜的类型。
37.本技术通过为第一反射镜3和第二反射镜4镀相应的增反膜,来减少激光光束在系统内部传播时损失的光能能量,提高光能利用率,以及降低系统在接收返回光时掺杂的背景光的干扰,增加从目标对象8反射回来的返回光的接收效率。
38.为了减小第一反射镜3阻挡第二反射镜4产生的第二返回光向接收镜组5传播的能量,可将第一反射镜3的大小设置为略大于线激光9在第一反射镜3位置的发光截面面积,足
够将线激光9反射至第二反射镜4即可。第二反射镜4的面积则可以大于第一反射镜3的面积,且使第二返回光在接收镜组5位置的截面面积略大于接收镜组5的通光口径,尽可能使第二返回光进入接收镜组5中。
39.如图4所示,共光路激光雷达系统还可以包括旋转轴41和驱动模块42,第二反射镜4的反射面背离旋转轴41,第二反射镜4连接于旋转轴41。驱动模块42被设置成能够驱动旋转轴41在0~360度的范围内转动,从而第二反射镜4能够绕旋转轴41的轴线旋转。旋转轴41可以垂直于线激光9未经第一反射镜3时的射出方向,第二反射镜4的反射面与旋转轴41所成的夹角可以为45度。驱动模块41可以为电机等。
40.作为一个示例,驱动模块42可以采用无刷直流电机,驱动第二反射镜4在360度范围内匀速转动。经转动的第二反射镜4的反射面的反射作用,可将第二光束沿水平方向射出,进行360度的范围内扫描,配合线激光9在竖直方向(慢轴方向)的发射角,能够探测柱体区域的目标对象8的信息。
41.作为另一个示例,第二反射镜4在驱动模块42的驱动下能够绕旋转轴41旋转0~360度中任意一个角度。例如,驱动模块42可以采用往复直流电机,驱动第二反射镜4在180度范围内往复匀速转动。经第二反射镜4的反射面的反射作用,可将第二光束沿水平方向射出,并在180度的范围内扫描,配合线激光9在竖直方向(慢轴方向)的发射角,可以实现三维视场(在此实施例中能够探测半个柱体区域的目标对象8的信息)的探测。
42.需要说明的是,上述示例中列举了第二反射镜4可以旋转360度或180度,但本领域技术人员应当能理解,本技术实施方式应不限于此。本领域技术人员可以根据实际应用场景灵活采用各种类型的电机,控制第二反射镜4在一定角度范围内的转动。第二反射镜4转动的速度也可以根据实际应用场景灵活设定。
43.本技术提出的共光路激光雷达系统只需通过驱动模块42来驱动第二反射镜4绕旋转轴41旋转,无需驱动其他部件转动,简化了激光雷达系统的结构,减少了器件的磨损,进而能够增加各器件的使用寿命。由于其他光学器件无需转动,所以可以保证各器件光学参数的稳定性。另外,由于驱动模块42只需驱动第二反射镜4的旋转,因此旋转起来更为轻便,扫描速率也可提升,从而能够达到更高的扫描帧率。驱动模块42也可以选用功率更小的其他器件,以节约成本。
44.本技术采用的是收发合置的结构形式,由第二反射镜4向系统外的目标对象8发射第二光束,并由第二反射镜4接收从被测目标8漫反射回来的第一返回光,即激光雷达的发射视场与接收视场重合。相比收发分置的激光雷达,本技术能够更有效地接收从目标对象8反射回来的第一返回光,提高接收效率。另外,增加接收效率后就可以采用光敏面面积更小的线阵探测器7。根据线阵探测器7的材料性质可知,光敏面面积的减小可以增加线阵探测器7对光信号的响应速度,即提高响应速率,同时光敏面面积的减小还可以降低背景光的引入,有利于提高信噪比。
45.接收镜组5可以为球面透镜、球面透镜组、非球面透镜和非球面透镜组中的一个或多个,其用于将较为发散的第二返回光进行汇聚,汇聚成较为收敛的第三返回光,从而方便线阵探测器7接收到更多的第三返回光,增加系统的接收效率。同时还可以如上所述,将线阵探测器7的光敏面的面积减小,进而提高响应速率,降低背景光的干扰,提高信噪比。
46.由于系统外的背景光也可以入射到第二反射镜4的反射面上,并随着第一返回光
在系统内传播,最终被线阵探测器7转换为电信号。背景光形成的电信号是一种噪声信号,不利于对有用信号的识别和处理,因此,本技术设置了滤光片6,如图1所示,其可以放置在接收镜组5与第二反射镜4之间,和/或放置在接收镜组5与线阵探测器7之间。滤光片6用于对第二返回光和/或第三返回光进行过滤处理,滤除第二返回光和/或第三返回光中掺杂的背景光所在的波段,保留有用波段,例如保留包括线激光9波长在内的一段范围内的光波波段,该范围可以根据实际应用场景进行灵活选择,本技术对此不进行具体限定。通过设置滤光片6,能够减少返回光中掺杂的背景光的光波段,有效降低背景光的干扰,提高信噪比,增加对有用信号的判别的准确度。
47.本技术提供的处理模块(图中未示出)被配置为根据发射模块发射线激光9的时刻t1和线阵探测器7接收漫反射光的时刻t2,确定目标对象8与共光路激光雷达系统之间的距离s。例如,s=(t2-t1)*c/2,其中c代表光速。处理模块还可以包括对线阵探测器7输出的电信号进行放大处理的电路,以及对放大后的电信号进行无线传播的电路,本技术对此不限制。
48.本技术提出的共光路激光雷达系统结构简单,无需使用复杂的光学器件,也无需采用透镜打孔、反射镜打孔等复杂工艺,能够有效节约成本。本技术通过采用收发合置的结构来提高系统接收返回光的接收效率,从而减小线阵探测器的光敏面面积,降低背景光的引入,提高响应速率,并且能够有效解决激光雷达近距离盲区的问题。本技术使用线光束发射和线阵探测器接收,可以在反射镜转动的情况下实现圆柱面范围的测量,探测范围较大。
49.以上所述是本技术的优选实施方式,应当指出,对于本领域技术人员来说,在不脱离本技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本技术的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1