一种基于磁传感器的姿态检测系统频响特性检测装置
1.本实用新型属于磁传感器应用和姿态检测技术领域,涉及一种基于磁传感器的姿态检测系统频响特性检测装置。
背景技术:
2.随着姿态检测系统在航天军事领域、工业控制领域、民用消费领域的广泛应用,对其频响特性、精度、稳定性、适用条件和成本等多个方面都提出了更高的要求。针对姿态检测系统在高频运动状态下,精度不高的缺陷,例如航空航天领域,飞行器的振动对精度的影响;民用消费领域,无人机受到撞击后,姿态无法及时校准;人体姿态方面,在高速运动过程中,姿态数据失真等等。对姿态检测系统频响特性研究就显得更加重要。目前姿态检测领域中的频响特性测试主要是针对于系统内部的陀螺仪和加速计进行测试,尚未进行整个系统的黑盒子测试,测试设备主要有单轴或多轴速率转台、角振动台、电振动台和离心机等。针对于动态的系统频率特性比较难检测和评估,主要挑战在无法提供高精度和高频带的激励源以及系统内部信号链中存在无法量化的环节。但是系统对控制器会产生直接影响,可以帮助识别潜在稳定性问题,所以为实现高带宽系统设计和应用提供参考依据是非常必要和重要的。
3.为此,本实用新型技术提出一种基于磁传感器的姿态检测系统频响特性检测装置,用于满足姿态检测系统频响特性测试,从而应用于低成本消费电子领域的产品。
4.根据系统输出信号幅值会随着输入信号频率的提高而产生衰减现象,来实现系统输入运动信号从低频段到高频段的频响特性测试。通过对姿态检测系统进行频响特性实验,将系统输出信号通过正弦拟合,与输入运动信号进行对比,发现随着输入信号频率不断提高,输出信号衰减越快,结果表明可以测试姿态检测系统的频响特性测试。
技术实现要素:
5.本实用新型的目的就是提供一种基于磁传感器的姿态检测系统频响特性检测装置。通过获得被测姿态检测系统在有限个频率点上的频率特性,并且获得幅值随频率变化的曲线得到bode图或nyquist图,以此判断该系统是否与输入运动信号匹配。
6.本实用新型包括三维角度传感器开发平台、姿态测试板和上位机(pc),姿态测试板上集成有六轴imu(惯性测量单元)、三轴地磁传感器、微处理器、rf 无线通信模块和电源管理模块。所述的姿态测试板安装在三维角度传感器开发平台上,三维角度传感器开发平台为沿地理坐标系xyz轴均能旋转360度的电动平台。
7.六轴imu用于采集被测物的加速度、角速率信息,并将采集到的信息传输给微处理器;三轴地磁传感器用于获取被测物所处的磁场信息;微处理器,用于读取六轴imu采集的数据,并对数据进行滤波融合得到相关姿态角;微处理器通过rf无线通信模块与上位机远程通信,实时输出姿态角;电源管理模块,用于给六轴imu、三轴地磁传感器、微处理器、rf无线通信模块提供电能;上位机用于显示姿态角。
8.六轴imu、三轴地磁传感器通过iic与微处理器进行通信,微处理器将处理所得的数据通过rf无线通信模块输出到上位机,使上位机直接显示系统的姿态角;上位机能同时显示运载体的横滚角、俯仰角、偏航角,使用户能实时监测运动情况。
9.与现有技术相比,本实用新型具有如下优势:采用本实用新型的姿态检测系统频响特性测试装置,通过改变输入正弦运动信号的频率,能够高效、准确的测量姿态检测系统的频响特性,特别是能够在高频段能够明显观察到输出信号的衰减,从而完成姿态检测系统频响特性测试。
附图说明
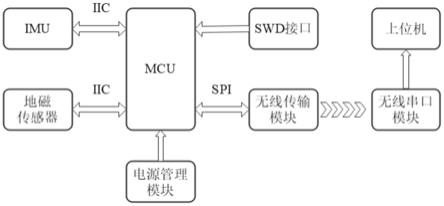
10.图1为本实用新型所用姿态检测系统硬件结构图;
11.图2~9为本技术实例实施测试结果图;
12.图10为本技术实施幅频特性曲线图。
具体实施方式
13.为了能够更加清楚说明本实用新型实施例的技术方案,下面将结合具体实施例对本实用新型设计进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变化和改进。这些都属于本实用新型的保护范围。
14.如图1所示,一种基于磁传感器的姿态检测系统频响特性检测装置包括三维角度传感器开发平台、姿态测试板和上位机(pc),姿态测试板上集成有六轴 imu(惯性测量单元)、三轴地磁传感器、微处理器、rf无线通信模块和电源管理模块。姿态测试板安装在三维角度传感器开发平台上,三维角度传感器开发平台为沿地理坐标系xyz轴均能旋转360度的电动平台。
15.六轴imu和三轴地磁传感器通过iic(集成电路总线)与微处理器进行通信,微处理器将处理好的数据通过rf无线通信模块传输到上位机,上位机能够将原始采集数据以及姿态角数据直接显示。六轴imu根据微处理器的命令,测量被测物加速度、角速率作为采集数据;本实施例中六轴imu型号为icm42605;三轴地磁传感器,用于测量被测物各个方向的磁场,本实施例中三轴地磁传感器型号为hmc5883l;微处理器模块用于测量初始化,发出测量命令、保存和读取采集数据,对采集数据进行数据融合得到姿态角信息;本实施例中微处理器型号为stm32f103t8u6;swd接口为串行调试接口,用于程序下载与调试; rf无线通信模块,用于同步远程传输,实时输出姿态信息;无线串口模块,连接无线接收模块,用于接收到姿态角信息后与上位机进行通信。本实施例中rf 无线通信模块型号为nrf24l01。
16.工作过程如下:
17.测试时将上述姿态检测系统的姿态测试板安装在三维角度传感器开发平台上,三维角度传感器开发平台为沿地理坐标系xyz轴均能旋转360度的电动平台,用于提供姿态检测系统的输入正弦运动信号。
18.将频率变化的正弦运动信号提供给姿态检测系统的输入端,系统将频率变化的正弦运动信号转化为电信号,然后经过微处理器的信号处理和转换,以数字信号的形式输出
一个与输入运动状态对应的姿态角;改变系统输入信号频率,通过输出信号与输入信号幅值对比,来确定系统衰减程度,以此实现姿态检测系统频响特性测试。
19.从姿态检测系统的角度,其输入为模拟量的运动信号,输出为数字信号的姿态角。对于mems(微机电系统)姿态检测系统,输入时六轴imu检测到惯性运动,输出通常是以数字信号来表示。
20.频响特性描述的是某一频率输出信号在该频率下降到系统实际检测到的运动幅度的70.7%(-3db)。姿态角主要是由载体坐标系与地理坐标系之间的关系来确定,用航向角、俯仰角、横滚角三个欧拉角表示;航向角、俯仰角、横滚角是载体坐标系相对于地理坐标系定义的。航向角的转轴与地理坐标系的z轴对应,俯仰角的转轴与地理坐标系x轴对应,横滚角的转轴与地理坐标系y轴对应。
21.理论上三个姿态角的频响特性是一致的,以俯仰角为例,测试系统频响特性。将姿态测试板固定在三维角度传感器开发平台上,俯仰角的旋转轴为x轴与三维角度传感器开发平台的转轴重合,三维角度传感器x轴、y轴、z轴通过上位机来控制各轴驱动电机来提供不同的旋转速度,以此来提供姿态检测系统的激励源。
22.系统的激励信号是通过三维角度传感器开发平台从90
°
到-90
°
的旋转过程,不断提高其旋转速度。然后通过输出信号来拟合出的正弦信号作对比,观察输出衰减程度,分析其频响特性。通过如下公式计算幅值衰减程度,衰减程度=20*log(chout/chin),其中,chout为系统输出信号幅值,chin为系统输入信号幅值。
23.测试系统在高速运动情况下姿态角的跟随情况(以俯仰角为例)。
①
使测试板y轴与转台转轴方向保持一致;
②
设置三维角度传感器开发平台轴向的速度为πrad/s作匀速;
③
整个转动过程中,记录下的俯仰角数据。
④
重复上述步骤,提高转台速度,分别以2πrad/s、3πrad/s、4πrad/s、5πrad/s、6πrad/s、7 πrad/s的速度转动,记录系统输出俯仰角跟随情况,测试结果如图2~9。系统输出俯仰角幅值在πrad/s时衰减-0.46db,2πrad/s衰减-0.48db,3πrad/s衰减
ꢀ‑
0.50db,4πrad/s衰减-0.85db,5πrad/s衰减-1.41db,6πrad/s衰减-3.07db, 7πrad/s衰减-8.75db。根据正弦拟合曲线的幅值衰减程度绘制幅频特性曲线,结果如图10所示。在5.6πrad/s左右,幅值衰减至-3db,以此确定系统的带宽。通过带宽来确定姿态检测系统的应用场景。
24.以上对本实用新型的具体实时例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求范围内做出各种变化和修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1